ПРИЧИНЫ ВНЕДРЕНИЯ ЦОС В
ЭЛЕКТРОСВЯЗЬ.
1. Сложность ( нередко невозможность ) решения некоторых задач аналоговым методом .
2. Прогресс в развитии электроники ( создание высокоскоростных многоразрядных АЦП , разработка сигнальных процессоров ) .
3. ЦОС позволяет реализовать универсальные модемы , в которых изменением программы осуществляется переход с одного вида сигнала на другой ( т.е. с одной модуляции на другую ).
4. ЦОС позволяет строить адаптивные радиоприемные устройства, работающие во все усложняющейся электромагнитной обстановке ( т.е. спектр постоянно загружается сигналами ) .
5. Простота , автоматически сменных , алгоритмов ЦОС и высокая точность их реализации .
6. ЦОС позволяет реализовать более сложные алгоритмы радио приема ( разнесенный прием , компенсация и подавление сосредоточенных помех и прием в целом ) .
7. При использование ЦОС значительно меньше влияет разброс параметров и действие дестабилизирующих факторов.
8. Высокая интеграция цифровых микросхем позволяет реализовать очень сложные алгоритмы приема сигналов , сохраняя приемлемый объем и стоимость аппаратуры .
9. Цифровая аппаратура легко поддается миниатюризации. Высокая технологичность и отсутствие регулировки понижает стоимость.
10.Проектирование цифровых устройств легче чем аналоговых и поддается автоматизации ( легко модулируются на ЭВМ ) .
11.ЦОС облегчает работу по созданию спецэфектов на ТВ ( работа режиссеров на теле-студии ) .
12.ЦОС позволяет существенно повысить качество изображения.
ПРОБЛЕМЫ РАЗВИТИЯ ЦОС .
1. Для ЦОС необходимо преобразовать аналоговый сигнал в цифровой ( требуется достаточно большой уровень сигнала - порядка 1в ) .
2. Преобразование аналогово сигнала в цифровой приводит к появлению погрешности дискретизации во времени и к погрешности квантования по уровню ( специфические погрешности ) .
3. Процесс обработки сигналов сопровождается погрешностями , вызванными округлениями результатов ( это приводит к ошибкам - шумам ) .
4.Требуется увеличение динамического диапазона и ширины спектра преобразуемых аналоговых сигналов ( т.к. каналы с ограниченной полосой пропускания и сложной помеховой обстановкой ) . Чтобы достигнуть возможности аналоговой техники нужно иметь динамический диапазон АЦП 120-130 дб с df=100 кГц . Таких АЦП пока нет . Реализуемый при df=100 кГц динамический диапазон АЦП 70-80 дб . Для широкополосных сигналов при df=100 Мгц динамический диапазон 6-24 дб .
5. Низкая скорость работы цифровых вычислительных устройств. (Сигнальные процессоры : КМ1813ВЕ11 , ТМS320.10 , ТМS320.20 , ТМS320.30 , ДSР5600 , ТМS320.50 .)
ТЕОРЕМА КОТЕЛЬНИКОВА .
Любой сигнал с ограниченным спектром ( бесконечный во времени ) однозначно определяется своими отсчетами , взятыми через интервал времени dt=1/2F т.е.
 , где u(kDt)-аналоговая величина;
, где u(kDt)-аналоговая величина;
Эта теорема утверждает , что если сигнал f(t) имеет преобразование Фурье Sf(w) отличное от нуля при частотах меньших 2pFm . То в отсчетах сигнала f(kDt) взятых через интервал Dt=1/2Fm содержится вся информация о непрерывной функции f(t) . Из теоремы следует , что эти отсчеты содержат информацию о сигнале f(t) в любой момент времени . Однако частота отсчетов должна быть по крайней мере в два раза больше высшей частоты сигнала Fm .
Доказательство.:
Дан сигнал f(t) , его спектр : S(w)=  при |w|<2pFm ,
при |w|<2pFm ,
0 , при |w|>2pFm.
Представим некоторую реализацию сигнала f(t) и его спектр S(f):
Если отсчеты сигнала брать с помощью бесконечно узких импульсов,расположенных в непосредственной близости друг от друга , мы однозначно определим любую функцию . Если интервал между импульсами увеличивать , то где-то мы начнем терять информацию о сигнале . Рассмотрим случай ,когда в качестве отсчетных импульсов используется периодическая последовательность импульсов длительностью t , повторяемых через Dt=1/2Fm . Временное и спектральное представление этих импульсов:
Спектр отсчетных импульсов можно записать в виде ряда Фурье , т.е.  yD(t)=A1coslt+A2coslt+A3coslt+............ Процедуру взятия отсчетов удобно рассматривать как умножение функции f(t) на функцию yD(t) . Результирующий дискретизованный сигнал можно представить в виде суммы последовательностей импульсов ,амплитуды которых равны значению функции f(t) в момент отсчета , а спектр такого сигнала представляет собой периодически повторяющуюся функцию Sf(w) с периодом l ,т.е.мы наблюдаем изменение амплитуды импульсов отсчета по закону f(t) и соответственно имеем амплитудную модуляцию каждой гармоники спектра импульсов отсчета сигналa :
yD(t)=A1coslt+A2coslt+A3coslt+............ Процедуру взятия отсчетов удобно рассматривать как умножение функции f(t) на функцию yD(t) . Результирующий дискретизованный сигнал можно представить в виде суммы последовательностей импульсов ,амплитуды которых равны значению функции f(t) в момент отсчета , а спектр такого сигнала представляет собой периодически повторяющуюся функцию Sf(w) с периодом l ,т.е.мы наблюдаем изменение амплитуды импульсов отсчета по закону f(t) и соответственно имеем амплитудную модуляцию каждой гармоники спектра импульсов отсчета сигналa :
Для восстановления првоначального сигнала нам достаточно отфильтровать полученный сигнал ФНЧ с частотой среза расположенной в интервале от Fm до 1/Dt-Fm . Рассмотрим какова может быть наименьшая частота следования счетных D импульсов, что бы еще имелась возможность отфильтровать полезный сигнал. В случае , если 1/D t=2Fm мы еще имеем возможность отфильтровать полезный сигнал если же 1/Dt<2Fm ,то произойдет наложение спектральных составляющих и восстановление первоначального сигнала без ошибки станет невозможным. Следовательно , для восстановления сигнала ,полученные отсчетные импульсы необходимо подать на вход ФНЧ с частотой среза равной Fm. Реакция идеального ФНЧ на узкий импульс единичной амплитуду представляет  собой функцию вида : y(t)=sin2pFt/2pFt
собой функцию вида : y(t)=sin2pFt/2pFt
На вход фильтра мы подаем сумму импульсов с амплитудами равными f(kDt) Разложение сигнала f(t) в ряд Котельникова указывает на технический способ передачи непрерывной функции (сигнала) f(t)с ограниченным спектром путем передачи отсчетных импульсов ,который сводиться к следующему:
и со сдвигом один относительно другого на Dt=1/2Fm . Сигнал на выходе фильтра представляет собой сумму откликов ,т.е.  Что соответствует ряду Котельникова .
Что соответствует ряду Котельникова .
Рис. 4.5.
a - сечение (осеcимметричной) аппаратной функции глаза человека; б - сечение (осесимметричной) частотной характеристики глаза человека.
воспринимается по логарифмическому закону. Это существенно нелинейный закон.
Другой отличительной характеристикой системы зрения человека является ее пространственночастотный отклик. Импульсный отклик глаза, рассматриваемого в виде двумерной линейной системы (т.е. линейной после начального логарифмического преобразования интенсивности наблюдаемого света), не является  - функцией Дирака. Реакция глаза на приходящее световое поле описывается аппаратной функцией, сечение которой показано на рис. 4.5, а [16]. Острый центральный пик и отрицательные боковые лепестки импульсного отклика глаза показывают, что глаз обрабатывает пространственные частоты так же, как фильтр верхних частот. Точная форма частотной характеристики глаза исследовалась с помощью ряда психовизуальных экспериментов; было показано, что глаз подавляет низкие и ослабляет высокие пространственные частоты. В грубом приближении пространственно-частотный отклик глаза имеет полосовой характер. Подобная характеристика ( рис. 4.5,б ), например, была получена в ряде экспериментов, проведенных Манносом и Сакрисоном [17].
- функцией Дирака. Реакция глаза на приходящее световое поле описывается аппаратной функцией, сечение которой показано на рис. 4.5, а [16]. Острый центральный пик и отрицательные боковые лепестки импульсного отклика глаза показывают, что глаз обрабатывает пространственные частоты так же, как фильтр верхних частот. Точная форма частотной характеристики глаза исследовалась с помощью ряда психовизуальных экспериментов; было показано, что глаз подавляет низкие и ослабляет высокие пространственные частоты. В грубом приближении пространственно-частотный отклик глаза имеет полосовой характер. Подобная характеристика ( рис. 4.5,б ), например, была получена в ряде экспериментов, проведенных Манносом и Сакрисоном [17].
Наконец, особенностью зрения человека является способность к насыщению, т.е. к ограничению отклика при очень больших или очень малых интенсивностях наблюдаемого светового потока. Перечисленные свойства системы зрения можно описать моделью, представленной в виде блок - схемы на рис. 4.6. Однако данная модель совершенно не отражает других известных свойств системы зрения. Например, есть сведения, что некоторые стороны процесса восприятия изображения можно объяснить только наличием не одной, как на рис. 4.6, а нескольких линейных систем, включенных параллельно, т.е. в рамках модели с частотными каналами [18]. Другие визуальные явления (такие, как иллюзия одновременного контраста) указывают, что логарифмическое преобразование, введенное в блок-схеме рис. 4.6, является слишком большим упрощением. Но, несмотря на известные недостатки, модель, представленная на рис. 4.6, является полезной, поскольку она
1) объясняет ряд важных явлений, таких, как восприятие яркости света и полосы Маха;
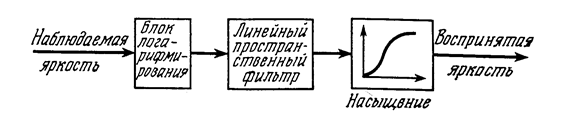
Рис. 4.6. Блок-схема системы зрения человека.
2) указывает, что в системе зрения содержатся некоторые элементы системы обработки информации. В частности система зрения человека, по-видимому, выполняет некоторые операции гомоморфной обработки информации [19].
Полезно связать логарифмическое преобразование изображения, выполняемое глазом, с рассмотренным ранее вопросом о плотностном (и яркостном изображениях. Можно заметить, что поскольку яркость света воздействует на глаз по логарифмическому закону, глаз воспринимает изображение как плотностное, если даже оно представлено (с помощью устройства отображения) в виде яркостного изображения.
Представляется логичным воспользоваться моделями системы зрения человека при анализе возможных применений цифровой обработки изображений. Однако это делать нужно осторожно, так как система зрения человека настолько сложна, что необоснованное применение упрощенных моделей зрения может принести больше вреда, чем пользы. Манное и Сакрисон [17] доказали применимость модели зрения для исследования вопроса о сокращении избыточности изображений. Однако пока еще не определены все области возможного применения моделей зрения.
Видеоинформации
Поскольку часто изображения состоят из многих последовательно появляющихся кадров (как, например, в телевидении) и изображение от кадра к кадру меняется мало, то в будущем, по видимому, больше внимания будет уделяться межкадровому сжатию (в отличие от внутрикадрового). Как отмечалось ранее, схемы межкадрового сжатия методом ДИКМ уже изучались. Оказалось, что комбинация внутрикадрового и межкадрового кодирования (в тех случаях, где это возможно сделать) может привести к уменьшению объема передаваемой информации в 30—50 раз.
Интерес к цветным изображениям возрастает; уже проводились опыты по сокращению их избыточности методом ДИКМ и методом преобразования [33, 36]. Методы сжатия аналогичны рассмотренным выше, но их реализация усложняется из-за наличия трех цветовых сигналов.
В последнее время созданы гибридные системы сжатия. В них для сжатия по одной координате (обычно по строкам дискретизованного изображения, или по горизонтали) используется схема с преобразованием, а по другой координате (по столбцам, или по вертикали) - схема с ДИКМ. В результате получается более простая система ( b ней не требуются двумерные преобразования), но дающая такую же или лучшую эффективность кодирования, чем системы с ДИКМ или с преобразованием [20].
Отметим, наконец, что все рассмотренные выше схемы не являются адаптивными, т.е. в них не изменяются в зависимости от свойств изображения распределение кодовых разрядов, расположение уровней квантования и т.д. Тешер [37] показал, что за счет адаптивности можно дополнительно повысить эффективность кодирования изображений. При одинаковом качестве восстановленного непрерывного изображения ему удалось сократить объем передаваемой информации почти вдвое по сравнению с другими системами.
Изображений
Как показано выше, основное уравнение формирования изображения имеет вид
g ( x , у)= 
 , (4.34)
, (4.34)
где g - сформированное изображение, h - импульсный отклик или аппаратная функция, а f - функция распределения яркости объ- 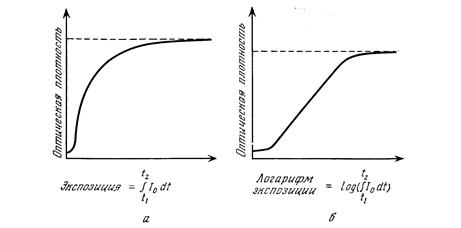
Рис. 4.11.
а - зависимость оптической плотности от экспозиции; б - зависимость оптической плотности от логарифма экспозиции.
екта. Конечно, непосредственно изображение g наблюдатель не получает; изображение существует в виде модуляции интенсивности какого-то излучения, исходящего от объекта. Изображение становится известным только после того, как оно будет воспринято и записано некоторым образом (например, на фотопленке, сетчатке глаза, люминесцентном экране). В процессе восприятия и записи в изображение вносятся шумы, поскольку при любом способе записи сигналов присутствуют шумы записывающей системы. Весь процесс получения изображения, т.е. формирование изображения, его восприятие и запись, был показан в виде блок-схемы на рис. 4.3. Таким образом, восстанавливать изображение приходится по записи, содержащей шум.
Задача повышения резкости изображения усложняется особенностями записывающей системы и ее собственным шумом. Как отмечалось в разд. 4.2, наиболее распространенная система для записи изображений, фотопленка, имеет нелинейную характеристику и вносит шум, модулированный сигналом. Типичная характеристика фотопленки приведена на рис. 4.11,а, где показана зависимость оптической плотности, определенной выше, от интенсивности падающего излучения, причем предполагается, что за .время выдержки интенсивность не изменяется. Обычно такую информацию приводят па графиках с логарифмическим масштабом по оси абсцисс (рис. 4.11,б); получающийся в таких координатах график зависимости D от log Е имеет линейный участок. Вид этой кривой иногда порождает заблуждения относительно резкой нелинейности характеристики фотопленки. Поскольку изображение записывается на пленке зернами серебра, а плотность серебряного слоя пропорциональна оптической плотности, то очевидно, что процессы записи на фотопленку нелинейны по своей сути.
Столь же сложны процессы, создающие шумы пленки. Дисперсия шума, вызванного случайным размещением зерен серебра на пленке, пропорциональна локальной .плотности проявленных серебряных зерен, причем функция пропорциональности усложняется наличием степенного множителя [8]. Таким образом, шум представляет собой флуктуации оптической плотности записи изображения, зависящие от сигнала. В общем случае задача цифровой обработки сигналов с шумом, зависящим от сигнала, еще не решена. Немногочисленные известные результаты [10] указывают, что зависимость шума от сигнала может оказаться не слишком большой проблемой. Поэтому обычно предполагают, что шум создается независимыми от сигнала флуктуациями плотности. Однако логарифмическая зависимость между оптической плотностью пленки, запечатлевшей изображение, и интенсивностью падающего на пленку излучения усложняет задачу. Даже если предположить, что флуктуации оптической плотности не зависят от сигнала, в свете, прошедшем через пленку, будет присутствовать мультипликативный шум, зависящий от сигнала. Аналогичные эффекты наблюдаются в фотоэлектронных системах (типа телевизионных и им подобных), характеристики которых описываются степенным законом.
С учетом вышеизложенного полная модель процессов формирования и записи изображения описывается соотношением
g(x,y) = s [  ] +
] +
+ n ( x, y ) (4.35)
где g - фактически записанное изображение, s - характеристика записывающего процесса, а п — шум. Предполагается, что п не зависит от записанного изображения. Задача повышения резкости (или восстановления) изображения заключается в определении исходного распределения интенсивности излучения объекта f ( x , у) на основе записи g ( x , у), содержащей шум.
Формула (4.35) позволяет оценить сложность задачи восстановления изображения. Искажения исходного изображения изменяют интенсивность экспонирующего света, а в нашем распоряжении имеется только нелинейная функция от этих интенсивностей. Если избавиться от нелинейности с помощью преобразования, обратного к s , то получим
s-1 { g ( x, y ) = s-1 {s [ h ( x, y ) ** f( x, y )] + n ( x, y )} , (4.36)
где знак ** означает двумерную свертку. Поскольку обратная нелинейность воздействует на сумму и оператор этой нелинейности недистрибутивен по отношению к оператору сложения, то наличие шумового слагаемого означает, что 1) получить точное обратное преобразование и исходные интенсивности невозможно, 2) при преобразовании g с использованием характеристики, обратной к нелинейной характеристике системы записи, будет получена нелинейная комбинация сигнала и шума.
Решения уравнения (4.36) в настоящее время не получены. На практике при восстановлении изображений делают одно из двух предположений. Первое предположение состоит в том, что в соотношении (4.36) операцию s-1 можно применить к слагаемым ïî отдельности, т.е.
s -1{ g( x, y) }  h (x, y) ** f ( x, y )+ s -1{ n ( x, y ) } , (4.37)
h (x, y) ** f ( x, y )+ s -1{ n ( x, y ) } , (4.37)
что эквивалентно замене шума на новый шумовой процесс s -1 {п}. При втором подходе данные обрабатываются в том виде, как они записаны, т.е. предполагается, что нелинейной функцией s можно пренебречь и
g ( x, у ) h ( x, у ) у ** f ( x, у ) + п ( x, у ). (4.38)
Равенства (4.37) и (4.38) были бы справедливы, если бы удовлетворялось любое из двух предположений: 1) функция s имеет слабую нелинейность и ее можно аппроксимировать линейной функцией или 2) сигнал g изменяется b малых пределах (низкоконтрастное изображение) и операторы s и s-1 близки к линейным. Графики типа изображенных на рис. 4.11 показывают, что нелинейность оператора s обычно нельзя считать слабой. При правильном выборе экспозиции диапазон изменения от черного к белому не соответствует предположению о низкой контрастности. Однако на практике изображение удается успешно восстановить в пространстве яркостей, связанном с преобразованием (4.37), или в пространстве плотностей, связанном с преобразованием (4.38), несмотря на теоретические трудности, возникающие при отбрасывании нелинейностей.
Даже при беглом взгляде на соотношения (4.37) или (4.38) видно, что восстановление изображений относится к задачам фильтрации с помощью инверсной свертки (т.е. к обработке записанной информации с помощью оператора h , который является обратным по отношению к оператору двумерной свертки с функцией h). Эта задача сложна тем, что сводится к решению плохо обусловленных систем линейных уравнений [38]. При повышении резкости изображений задача усложняется за счет того, что для многих изображений аппаратная функция сингулярна, т.е. преобразование Фурье от нее имеет нули, что наблюдается, например, при дрожании съемочной камеры или плохой ее фокусировке. Поэтому при решении задач восстановления изображений значительные усилия затрачиваются на преодоление трудностей, связанных с сингулярностью [2].
Для восстановления изображений цифровыми методами необходимо, чтобы все уравнения были записаны для дискретизованных функций. Поэтому соотношение (4.35) принимает вид
g ( j  x, k y )
x, k y )  s {
s { 
 } + n ( j
} + n ( j  x, k y ) , (4.39)
x, k y ) , (4.39)
где знак (приближения указывает, что дискретные суммы не являются точным представлением исходных интегралов. Аналогичные выражения можно записать для формул (4.37) и (4.38). Интересно отметить, что соотношение (4.39) можно рассматривать как систему уравнений относительно неизвестных значений f. Если выполняются предположения, сделанные при выводе соотношения (4.38), то соответствующие дискретные уравнения (где без потери общности можно положить  x = y = 1) прекращаются в систему линейных уравнений относительно f ( p , q ):
x = y = 1) прекращаются в систему линейных уравнений относительно f ( p , q ):
g ( j, k ) 
 , (4.40)
, (4.40)
Формула (4.40) подсказывает, что задача восстановления изображений сводится к решению системы линейных уравнений. Это действительно так, и для подтверждения можно представить соотношение (4.40) в виде произведения матрицы на вектор. Поэтому значение цифровых методов обработки сигналов, таких, как линейная фильтрация и БПФ, состоит .в том, что они являются средством для быстрого нахождения точного или приближенного решения очень больших (с N 2 переменными) систем линейных уравнений. Такой .подход очень важен для развития более совершенных методов повышения резкости изображений, но обсуждение его требует применения теории матриц в объеме, чрезмерно большом для данной книги. Подробнее связь между матричными представлениями и восстановлением изображений методом дискретного преобразования Фурье описана в работах [2, 39, 40].
Образование проекций
Изображения, получаемые с помощью проникающей радиации, образуются за счет ослабления луча в исследуемом веществе. Чем плотнее вещество, тем слабее интенсивность луча, прошедшего через вещество. Таким образом, изображение, наблюдаемое в проходящих лучах, определяется интегральным влиянием некоторой характеристики вещества объекта на интенсивность луча. Пусть f ( x 1 , x 2 , x 3) описывает распределение вещества в пространственных координатах (х1, х2, x 3 ). Допустим, что просвечивающий луч направлен вдоль оси х1, как на рис. 4.19. Тогда распределение интенсивности проникающего излучения в плоскости (x 2 , x 3 ) пропорционально функции g , определяемой соотношением
 (4.63)
(4.63)
Важное свойство проекций, задаваемых формулами типа (4.63), можно заметить при анализе преобразования Фурье от функции g (x 2 , x 3):
 (4.64)
(4.64)
Трехмерное преобразование Фурье от исходного распределения имеет вид
 (4.65)
(4.65)
Сравнивая G и F , видим, что
 (4.66)
(4.66)
Таким образом, преобразование от проекции равно преобразованию Фурье от распределения вещества в объекте при w 1 =0. Такую функцию называют сечением преобразования Фурье, 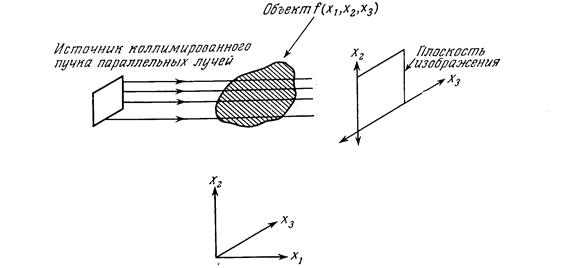
Рис. 4.19. Геометрические соотношения при воспроизведении изображения по проекциям.
12
поскольку она образуется сечением исходного трехмерного преобразования вдоль двумерной плоскости.
Очевидно, что аналогичными свойствами обладают также проекции меньших размерностей. Предположим, что проникающее излучение направлено в виде плоского луча (т.е. луч имеет бесконечно малый размер вдоль оси x 3 и перпендикулярен ей, причем вдоль оси x 2 его интенсивность одинакова, а ширина больше размеров объекта). Луч с координатой x 3 будет проектировать все элементы внутреннего строения объекта, лежащего в сечении, совпадающем с плоскостью луча. Если распределение вещества в сечении с координатой x 3 описывается функцией f 3 ( x 1 , x 2 ), то одномерная проекция двумерного сечения имеет вид
 (4.67)
(4.67)
и соотношение
 (4.68)
(4.68)
как и прежде, описывает связь между преобразованиями проекции и оригинала.
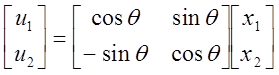
Предположим теперь, что плоский луч проникающего излучения остается перпендикулярным оси x 3, а источник излучения вращается вокруг некоторого центра, находящегося в объекте, так что угол между направлением луча и осью x 1 равен не нулю, а некоторой величине  (см. рис. 4.20). Очевидно, можно сделать преобразование координат так, чтобы ось и1 была параллельна направлению проектирующего луча. Это преобразование имеет вид
(см. рис. 4.20). Очевидно, можно сделать преобразование координат так, чтобы ось и1 была параллельна направлению проектирующего луча. Это преобразование имеет вид
Равенства (4.67) и (4.68) остаются справедливыми и в новой системе координат (u 1, u 2), что позволяет сформулировать следующую теорему о проекции и сечении, одномерное преобразование Фурье от проекции под углом равно преобразованию Фурье исходного двумерного распределения вещества в двумерной плоскости спектральных переменных вдоль линии, направленной под углом  , т.е. является сечением спектра под углом
, т.е. является сечением спектра под углом  .
.
С помощью этой теоремы на основе проекций трехмерного тела можно воспроизвести изображение внутренней структуры тела. Если источник плоского луча расположить в точке с координатой х3, как показано на рис. 4.20, и изменять угол в интервале 0<  <
<  , то, как показано в следующем разделе, из набора одномерных проекций можно воспроизвести структуру тела в сечении с координатой x 3 . Затем координата х 3 изменяется и тем же
, то, как показано в следующем разделе, из набора одномерных проекций можно воспроизвести структуру тела в сечении с координатой x 3 . Затем координата х 3 изменяется и тем же
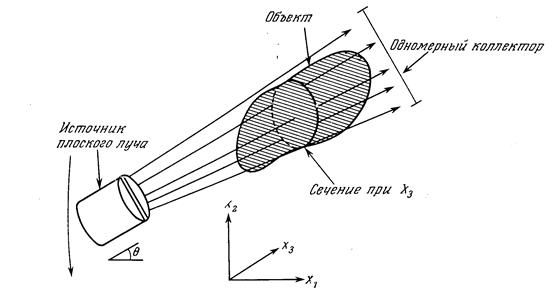
Рис. 4.20. Геометрические соотношения при вращении источника вокруг точки, зафиксированной в объекте, и схема получения двумерных проекций.
способом получается новое сечение. Процесс продолжается до тех пор, пока не будет получен полный набор сечений, показывающих внутреннюю структуру объекта в трех измерениях.
Теоретически, конечно, можно воспроизвести структуру трехмерного объекта по его двумерным проекциям без использования вспомогательных одномерных проекций и связанных с ними сечений, как описано в предыдущем абзаце. На практике, однако, выгоднее пользоваться методом плоских сечений, хотя и связанным с повторением одинаковых операций, но зато не требующих такого огромного числа вычислений, как прямое воспроизведение трехмерной структуры. Поэтому задачу воспроизведения будем в основном рассматривать как задачу выделения двумерной информации из одномерных проекций. Ниже описываются методы цифровой обработки сигналов, позволяющие воспроизвести изображение.
ПРИЧИНЫ ВНЕДРЕНИЯ ЦОС В
ЭЛЕКТРОСВЯЗЬ.
1. Сложность ( нередко невозможность ) решения некоторых задач аналоговым методом .
2. Прогресс в развитии электроники ( создание высокоскоростных многоразрядных АЦП , разработка сигнальных процессоров ) .
3. ЦОС позволяет реализовать универсальные модемы , в которых изменением программы осуществляется переход с одного вида сигнала на другой ( т.е. с одной модуляции на другую ).
4. ЦОС позволяет строить адаптивные радиоприемные устройства, работающие во все усложняющейся электромагнитной обстановке ( т.е. спектр постоянно загружается сигналами ) .
5. Простота , автоматически сменных , алгоритмов ЦОС и высокая точность их реализации .
6. ЦОС позволяет реализовать более сложные алгоритмы радио приема ( разнесенный прием , компенсация и подавление сосредоточенных помех и прием в целом ) .
7. При использование ЦОС значительно меньше влияет разброс параметров и действие дестабилизирующих факторов.
8. Высокая интеграция цифровых микросхем позволяет реализовать очень сложные алгоритмы приема сигналов , сохраняя приемлемый объем и стоимость аппаратуры .
9. Цифровая аппаратура легко поддается миниатюризации. Высокая технологичность и отсутствие регулировки понижает стоимость.
10.Проектирование цифровых устройств легче чем аналоговых и поддается автоматизации ( легко модулируются на ЭВМ ) .
11.ЦОС облегчает работу по созданию спецэфектов на ТВ ( работа режиссеров на теле-студии ) .
12.ЦОС позволяет существенно повысить качество изображения.
ПРОБЛЕМЫ РАЗВИТИЯ ЦОС .
1. Для ЦОС необходимо преобразовать аналоговый сигнал в цифровой ( требуется достаточно большой уровень сигнала - порядка 1в ) .
2. Преобразование аналогово сигнала в цифровой приводит к появлению погрешности дискретизации во времени и к погрешности квантования по уровню ( специфические погрешности ) .
3. Процесс обработки сигналов сопровождается погрешностями , вызванными округлениями результатов ( это приводит к ошибкам - шумам ) .
4.Требуется увеличение динамического диапазона и ширины спектра преобразуемых аналоговых сигналов ( т.к. каналы с ограниченной полосой пропускания и сложной помеховой обстановкой ) . Чтобы достигнуть возможности аналоговой техники нужно иметь динамический диапазон АЦП 120-130 дб с df=100 кГц . Таких АЦП пока нет . Реализуемый при df=100 кГц динамический диапазон АЦП 70-80 дб . Для широкополосных сигналов при df=100 Мгц динамический диапазон 6-24 дб .
5. Низкая скорость работы цифровых вычислительных устройств. (Сигнальные процессоры : КМ1813ВЕ11 , ТМS320.10 , ТМS320.20 , ТМS320.30 , ДSР5600 , ТМS320.50 .)
ТЕОРЕМА КОТЕЛЬНИКОВА .
Любой сигнал с ограниченным спектром ( бесконечный во времени ) однозначно определяется своими отсчетами , взятыми через интервал времени dt=1/2F т.е.
, где u(kDt)-аналоговая величина;
Эта теорема утверждает , что если сигнал f(t) имеет преобразование Фурье Sf(w) отличное от нуля при частотах меньших 2pFm . То в отсчетах сигнала f(kDt) взятых через интервал Dt=1/2Fm содержится вся информация о непрерывной функции f(t) . Из теоремы следует , что эти отсчеты содержат информацию о сигнале f(t) в любой момент времени . Однако частота отсчетов должна быть по крайней мере в два раза больше высшей частоты сигнала Fm .
Доказательство.:
Дан сигнал f(t) , его спектр : S(w)= при |w|<2pFm ,
0 , при |w|>2pFm.
Представим некоторую реализацию сигнала f(t) и его спектр S(f):
Если отсчеты сигнала брать с помощью бесконечно узких импульсов,расположенных в непосредственной близости друг от друга , мы однозначно определим любую функцию . Если интервал между импульсами увеличивать , то где-то мы начнем терять информацию о сигнале . Рассмотрим случай ,когда в качестве отсчетных импульсов используется периодическая последовательность импульсов длительностью t , повторяемых через Dt=1/2Fm . Временное и спектральное представление этих импульсов:
Спектр отсчетных импульсов можно записать в виде ряда Фурье , т.е. yD(t)=A1coslt+A2coslt+A3coslt+............ Процедуру взятия отсчетов удобно рассматривать как умножение функции f(t) на функцию yD(t) . Результирующий дискретизованный сигнал можно представить в виде суммы последовательностей импульсов ,амплитуды которых равны значению функции f(t) в момент отсчета , а спектр такого сигнала представляет собой периодически повторяющуюся функцию Sf(w) с периодом l ,т.е.мы наблюдаем изменение амплитуды импульсов отсчета по закону f(t) и соответственно имеем амплитудную модуляцию каждой гармоники спектра импульсов отсчета сигналa :
Для восстановления првоначального сигнала нам достаточно отфильтровать полученный сигнал ФНЧ с частотой среза расположенной в интервале от Fm до 1/Dt-Fm . Рассмотрим какова может быть наименьшая частота следования счетных D импульсов, что бы еще имелась возможность отфильтровать полезный сигнал. В случае , если 1/D t=2Fm мы еще имеем возможность отфильтровать полезный сигнал если же 1/Dt<2Fm ,то произойдет наложение спектральных составляющих и восстановление первоначального сигнала без ошибки станет невозможным. Следовательно , для восстановления сигнала ,полученные отсчетные импульсы необходимо подать на вход ФНЧ с частотой среза равной Fm. Реакция идеального ФНЧ на узкий импульс единичной амплитуду представляет собой функцию вида : y(t)=sin2pFt/2pFt
На вход фильтра мы подаем сумму импульсов с амплитудами равными f(kDt) Разложение сигнала f(t) в ряд Котельникова указывает на технический способ передачи непрерывной функции (сигнала) f(t)с ограниченным спектром путем передачи отсчетных импульсов ,который сводиться к следующему:
и со сдвигом один относительно другого на Dt=1/2Fm . Сигнал на выходе фильтра представляет собой сумму откликов ,т.е. Что соответствует ряду Котельникова .
Восстановление сигналов по его отсчетам .
1)взятие отсчета f(kDt) функции f(t) в моменты kDt ;
2)значение полученных отсчетов передаются на приемную сторону с использованием любогометода кодирования и модуляции ;
3)на приемной стороне вырабатываются короткие импульсы ,амплитуды которых пропорциональны принятым значениям отсчетов ;
4)полученные импульсы подаются на идеальный ФНЧ с частотой среза Fм . На выходе фильтра получается функция f '(t) , пропорциональная переданной функции f(t) . Идеальный ФНЧ с полосой пропускания Fм при действии на его вход единичного импульса d(t) дает на выходе напряжение ,соответствующее функции : y(t)=sin2p Fmt/2pFmt При восстановлении функции f(t) на вход фильтра подают короткие импульсы с амплитудами , соответствующими f(kDt) и с интервалами Dt. На выходе фильтра получается напряжение , соответствующее сумме откликов фильтра на каждый из импульсов . В моменты времени kDt функция f(t) восстанавливается совершенно точно , так как в этот момент только одна из отсчетных функций y(t-kDt) не равна нулю . В остальные моменты времени для точного восстановления необходимо суммировать бесконечное число отсчетных функций .
Дата: 2019-05-28, просмотров: 375.