Использованный в предыдущем разделе метод моментов приводит, при определенных условиях, к состоятельным оценкам. Однако оценки по методу моментов, вообще говоря, неэффективны. К тому же метод моментов неприменим, когда теоретические моменты нужного порядка не существуют. Одним из популярных общих методов получения оценок параметров, обладающих рядом преимуществ по сравнению с методом моментов, является метод максимального правдоподобия (м.м.п.).Напомним суть этого метода.
Пусть имеем вектор наблюдений  случайной последовательности
случайной последовательности  и
и  - совместная плотность этих наблюдений. Векторный параметр
- совместная плотность этих наблюдений. Векторный параметр  принадлежит параметрическому множеству
принадлежит параметрическому множеству  . Функция правдоподобия (при фиксированных наблюдениях) определяется как следующая функция параметра
. Функция правдоподобия (при фиксированных наблюдениях) определяется как следующая функция параметра  :
:
 . (93)
. (93)
Принцип максимального правдоподобия (м.п.) предписывает выбор в качестве оценки параметра такого значения  для которого
для которого
 . (94)
. (94)
Верхняя грань может не достигаться, и для таких случаев вводится модифицированная оценка м.п.  , определяемая условием
, определяемая условием
 ,
,
где c - фиксированное число,  . Может случится, что для некоторых наблюдений
. Может случится, что для некоторых наблюдений  и
и  не существуют. Однако можно показать, что при условиях регулярности на
не существуют. Однако можно показать, что при условиях регулярности на  такими наблюдениями можно пренебречь.
такими наблюдениями можно пренебречь.
Часто удобно работать не с функцией  , а с ее логарифмом:
, а с ее логарифмом:  . Условие (94) переходит в
. Условие (94) переходит в
 . (95)
. (95)
Если супремум в (95) достигается во внутренней точке множества  и
и  дифференцируема по , то в точке
дифференцируема по , то в точке  дожны обращатся в нуль частные производные функции
дожны обращатся в нуль частные производные функции  . Следовательно, в этом случае
. Следовательно, в этом случае  удовлетворяет уравнениям
удовлетворяет уравнениям
 ,
,  . (96)
. (96)
Уравнения (96) называются уравнениями м.п., а всякое их решение - оценкой м.п. Оценку, определяемую условием (95), называют оценкой метода м.п.
Общие свойства оценок м.п. по независимым наблюдениям можно найти, например, в [7]. Нас же будут интересовать оценки м.п. параметров по зависимым наблюдениям, а именно, по с.п. АР(p), СС(q) и АРСС(p,q). Для получения оценок м.п., согластно вышесказанному, нужно прежде всего найти функцию правдоподобия  . Однако, удобные для использования формулы для
. Однако, удобные для использования формулы для  удается получить только в предположении, что входная последовательность
удается получить только в предположении, что входная последовательность  - гауссовская. Тогда в силу линейности преобразований, осуществляемые формулами (7), (32) и (43), выходная последовательность
- гауссовская. Тогда в силу линейности преобразований, осуществляемые формулами (7), (32) и (43), выходная последовательность  тоже будет гауссовской. Если
тоже будет гауссовской. Если  и обеспечена стационарность последовательности Y, то вектор
и обеспечена стационарность последовательности Y, то вектор  будет гауссовским с нулевым вектором средних значений и корреляционной матрицей
будет гауссовским с нулевым вектором средних значений и корреляционной матрицей  , где
, где  находятся по формулам (33) для последовательности СС(q) и из уравнений (11) и (46) дял последовательностей АР(p) и АРСС(p,q) соответственно. Следовательно, плотность вектора
находятся по формулам (33) для последовательности СС(q) и из уравнений (11) и (46) дял последовательностей АР(p) и АРСС(p,q) соответственно. Следовательно, плотность вектора  будет иметь вид
будет иметь вид
 , (97)
, (97)
где  ,
,  - матрица, обратная к корреляционной, символ
- матрица, обратная к корреляционной, символ  обозначает скалярное произведение в эвклидовом пространстве размерности T. Практическому использованию плотности (9) при больших T препятствуют трудности обращению матрицы R. Однако м.м.п. удается реализовать для конкретных моделей гауссовских случайных последовательностей, к рассмотрению которых мы и перейдем.
обозначает скалярное произведение в эвклидовом пространстве размерности T. Практическому использованию плотности (9) при больших T препятствуют трудности обращению матрицы R. Однако м.м.п. удается реализовать для конкретных моделей гауссовских случайных последовательностей, к рассмотрению которых мы и перейдем.
М.м.п. для с.п. АР( p ). В соответствии с идеей м.м.п. начнем с рассмотрения функции правдоподобия. Предположим, что на вход авторегрессионной модели (7) подается гауссовский «шум»  с
с  и
и  . Так как модель (7) осуществляет линейное преобразование, то выходной «сигнал» , как известно, тоже будет гауссовским. Если модель (7) стационарна, то с.п. Y стационарна
. Так как модель (7) осуществляет линейное преобразование, то выходной «сигнал» , как известно, тоже будет гауссовским. Если модель (7) стационарна, то с.п. Y стационарна  и корреляционной функцией, определяемой разностным уравнением вида (11). Для гауссовского вектора
и корреляционной функцией, определяемой разностным уравнением вида (11). Для гауссовского вектора  плотность распределения может быть записана в соответствии с формулой (97)
плотность распределения может быть записана в соответствии с формулой (97)
 , (98)
, (98)
где  -вектор параметров модели (7),
-вектор параметров модели (7),  ,
,  - корреляционная матрица вектора
- корреляционная матрица вектора  .
.
При использовании плотности (98) можно избежать обращения матрицы  . Для этого воспользуемся представлением
. Для этого воспользуемся представлением
 , (99)
, (99)
где первый множитель правой части - безусловная плотность вектора  , получающаяся из (98) при
, получающаяся из (98) при  , а второй - условная плотность вектора
, а второй - условная плотность вектора  при фиксированном значении вектора
при фиксированном значении вектора  . Эту условную плотность можно получить, используя плотность распределения вектора
. Эту условную плотность можно получить, используя плотность распределения вектора 

 , (100)
, (100)
Но при фиксированном векторе  вектор
вектор  и
и  связаны преобразованием
связаны преобразованием
.....................................
с единичным якобианом.
Следовательно,


 (101)
(101)
Кроме того,
 ,
,
Учитывая эту формулу и (101), запишем (99) в виде
 , (102)
, (102)
В предыдущей формуле

 (103)
(103)
Заметим, что  , где
, где  - матрица, составленная из значений нормированной корреляционной функции, не зависящих от
- матрица, составленная из значений нормированной корреляционной функции, не зависящих от  , а величина
, а величина  , согласно формуле (15), пропорциональна
, согласно формуле (15), пропорциональна  . Следовательно
. Следовательно  и
и  , где
, где  - знаменатель правой части (15). Тогда логарифм функции правдоподобия
- знаменатель правой части (15). Тогда логарифм функции правдоподобия 
 будет иметь вид
будет иметь вид
 . (104)
. (104)
Наряду с параметрами  будем считать неизвестной также дисперсию
будем считать неизвестной также дисперсию  входной последовательности. Тогда уравнения правдоподобия запишутся в виде
входной последовательности. Тогда уравнения правдоподобия запишутся в виде
 , (105)
, (105)
 ,
,
 . (106)
. (106)
Выражая дисперсию «шума»  из (105) и подставляя ее в систему (106), будем иметь систему относительно неизвестного вектора
из (105) и подставляя ее в систему (106), будем иметь систему относительно неизвестного вектора  . Однако при решении получающейся системы возникают трудности, поскольку в общем случае величины
. Однако при решении получающейся системы возникают трудности, поскольку в общем случае величины
 ,
, 
- сложные функции  . Продемонстрируем эти трудности на простейших случаях.
. Продемонстрируем эти трудности на простейших случаях.
1. С.п.АР(1). В этом случае  ,
,  и из (105) и (106) получаем кубическое уравнение относительно
и из (105) и (106) получаем кубическое уравнение относительно 

 ,
,
корни которых в принципе могет быть точно найдены с использованием формул Г.Кардано. Однако если все три корня вещественны, то предстоит еще выяснить, какой из них доставляеи величине  наибольшее значение.
наибольшее значение.
2. С.п.АР(2). Имеем  ,
,
и система (106) получает вид

 ,
,

 ,
,
где

 .
.
В этом случае точное решение системы относительно неизвестных  и
и  уже не может быть найдено.
уже не может быть найдено.
Итак, для получения оценки вектора  в общем случае нужно либо искать приближенное решение системы (106), либо, отказавшись от ее решения, максимизировать вместо логарифма функции правдоподобия другую, но близкую к нему в каком-то смысле функцию. Ясно, что второй подход приведет к оценкам, которые не будут оценками м.п., но их все-таки естественно называть оценками квазимаксимального правдоподобия.
в общем случае нужно либо искать приближенное решение системы (106), либо, отказавшись от ее решения, максимизировать вместо логарифма функции правдоподобия другую, но близкую к нему в каком-то смысле функцию. Ясно, что второй подход приведет к оценкам, которые не будут оценками м.п., но их все-таки естественно называть оценками квазимаксимального правдоподобия.
Оценки квазимаксимального правдоподобия. Примем во внимание, что в логарифме функции правдоподобия (104) слагаемое, содержащее  , не зависит от T и мало по сравнению с остальными двумя слагаемыми, растущими с ростом T. Пренебрегая этими слагаемыми, получим функцию
, не зависит от T и мало по сравнению с остальными двумя слагаемыми, растущими с ростом T. Пренебрегая этими слагаемыми, получим функцию
 . (107)
. (107)
Крому того заметим, что величина  , определенная неравенством (103), не только квадратичная форма от наблюдений
, определенная неравенством (103), не только квадратичная форма от наблюдений  , но (как показано в работе [3,с.304]) и от параметров
, но (как показано в работе [3,с.304]) и от параметров  . Если положить
. Если положить  , то для некоторой матрицы D размера (p+1)x(p+1) справедливо равенство
, то для некоторой матрицы D размера (p+1)x(p+1) справедливо равенство
 , (108)
, (108)
причем
 (109)
(109)
а элементы  определяются как суммы
определяются как суммы
 (110)
(110)
содержащие  слагаемых. Тогда оценки
слагаемых. Тогда оценки  параметров
параметров  , полученные путем максимизацмм (107), совпадают с оценками наименьших квадратов, полученными минимизацией . Дифференцируя (108) по
, полученные путем максимизацмм (107), совпадают с оценками наименьших квадратов, полученными минимизацией . Дифференцируя (108) по  ,
,  и приравнивая к нулю соответствующие производные, получим систему
и приравнивая к нулю соответствующие производные, получим систему
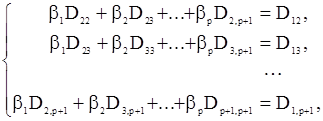 (111)
(111)
которая в очевидных матричныз обозначениях имеет вид
 ,
,
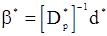
откуда получаем оценку квазиоптимального правдоподобия
 (112)
(112)
Приближенные оценки м.п. параметров можно получить изменяя сами уравнения правдоподобия (106). Сначала производную  запишем в виде
запишем в виде
 , (113)
, (113)
 .
.
Беря математические ожидания от обеих частей этих равенств и учитывая, что  , получаем
, получаем

 . (114)
. (114)
Теперь вспомним разностное уравнение (11) и, умножим его на  , запишем в виде
, запишем в виде

и вычтем из (114). Получим

 . (115)
. (115)
Используя в качестве оценок значений корреляционной функции  величины
величины  , из (115) получим оценку для
, из (115) получим оценку для  , а подставляя ее в (113), получим
, а подставляя ее в (113), получим
 ,
,
что ведет к системе линейных уравнений согластно формуле (111), в которых вместо стоят величины
 .
.
В очевидных матричных обозначениях мы будем иметь систему
 ,
,
из которых получаем приближенную оценку м.п.
 .
.
Продемонстрируем различия рассмотренных оценок параметров на частных случаях  и
и  .
.
1. С.п.АР(1). В этом случае оценка квазимаксимального правдоподобия находится по формуле (112), в которой
 и
и  .
.
Тогда
 .
.
Приближенная оценка м.п. определяется формулой (116), в которой
 ,
,  .
.
Тогда
 .
.
2. С.п.АР(2). Для получения оценки квазимаксимального правдоподобия вектора  нужно иметь вектор
нужно иметь вектор  и матрицу
и матрицу
 ,
,
причем выражения для величин  и
и  указаны в предыдущем примере, а
указаны в предыдущем примере, а  ,
,  и
и  имеют следующий вид:
имеют следующий вид:
 ,
,  ,
,  .
.
Используя (112), находим
 ,
,
 .
.
Приближенная оценка м.п.  вектора может быть получена из предыдущих формул, в которых величины
вектора может быть получена из предыдущих формул, в которых величины  нужно заменить величинами
нужно заменить величинами

Рассмотренные примеры показывают, что для больших выборок различия между оценками, полученными путем разных приближений, малы. То же самое можно сказать об оценках параметров АР(p) и в общем случае.
М.м.п. для с.п. СС( q ) . Предположим, что на входе модели скользящего среднего (32) имеем гауссовский «шум»  с
с  и
и  . При этом выходной «сигнал»
. При этом выходной «сигнал»  тоже будет гауссовским и стационарным с
тоже будет гауссовским и стационарным с  и корреляционной функцией, определяемой формулой (33). Рассмотрим функцию правдоподобия для с.п.Y соответствующую наблюдениям
и корреляционной функцией, определяемой формулой (33). Рассмотрим функцию правдоподобия для с.п.Y соответствующую наблюдениям  . Гауссовский вектор
. Гауссовский вектор  будет иметь плотность распределения вида
будет иметь плотность распределения вида
 , (117)
, (117)
где  - вектор параметров модели (32)
- вектор параметров модели (32)  - корреляционная матрица вектора
- корреляционная матрица вектора  с элементами, определяемыми по формуле (33). Хотя формула (33) проста, обращение матрицы
с элементами, определяемыми по формуле (33). Хотя формула (33) проста, обращение матрицы  при достаточно больших T сопряжено со значительными вычислительными трудностями. Поэтому рассмотрим удобный способ вычисления квадратичной формы
при достаточно больших T сопряжено со значительными вычислительными трудностями. Поэтому рассмотрим удобный способ вычисления квадратичной формы  . Для этого рассмотрим вектор
. Для этого рассмотрим вектор  , плотность распределения которого имеет вид
, плотность распределения которого имеет вид
 (118)
(118)
и вектор  , который связан с
, который связан с  линейным преобразованием в соответствии с (32):
линейным преобразованием в соответствии с (32):
 .
.
При этом мы можем записать представление
 ,
,
где A - матрица размером  , а B - матрица размером
, а B - матрица размером  . Элементы этих матриц представляют собой функции параметров
. Элементы этих матриц представляют собой функции параметров  . Замечая, что преобразование вектора в
. Замечая, что преобразование вектора в  имеет единичный якобиан, можем записать совместную плотность и
имеет единичный якобиан, можем записать совместную плотность и 
 ,
,
где  .
.
Вектор предварительных значений «шума»  на практике обычно не наблюдается, и мы найдем для него линейную относительно
на практике обычно не наблюдается, и мы найдем для него линейную относительно  оценку, минимизирующую
оценку, минимизирующую  . Пусть
. Пусть  некоторая оценка (функция наблюдения ) вектора
некоторая оценка (функция наблюдения ) вектора  . Запишем вектор
. Запишем вектор

и подставим его в выражение для  . Получим равенство
. Получим равенство
где штрих обозначает транспонирование матрицы. Если выбрать так, что
 (119)
(119)
то  будет иметь вид
будет иметь вид
 (120)
(120)
где  - функция только наблюдений
- функция только наблюдений  , но не предварительных значений «шума».
, но не предварительных значений «шума».
Из (120) видно, что достигает минимума при  , т.е - оценка наименьших квадратов. При этом совместную плотность
, т.е - оценка наименьших квадратов. При этом совместную плотность  и
и  можно представить в виде
можно представить в виде
С другой стороны, ей можно придать вид
 ,
,
где  - условная (гауссовская) плотность предварительных значений «шума» при фиксированных наблюдениях . Следовательно
- условная (гауссовская) плотность предварительных значений «шума» при фиксированных наблюдениях . Следовательно

 (121)
(121)
 (122)
(122)
Сделаем следующие выводы
1. Из (121) видно, что  является условным математическим ожиданием вектора при заданных при наблюдениях
является условным математическим ожиданием вектора при заданных при наблюдениях  и фиксированном
и фиксированном  . Используем обозначение
. Используем обозначение

имеем 
и

 . (123)
. (123)
Хотя  можно получить непосредственно методом наименьших квадратов, на практике его легче вычислять, используя тот факт, что
можно получить непосредственно методом наименьших квадратов, на практике его легче вычислять, используя тот факт, что  , и получая
, и получая  по методике «прогнозирования» назад описанной в работе [3,разд.7.1.4 и 7.1.5]
по методике «прогнозирования» назад описанной в работе [3,разд.7.1.4 и 7.1.5]
Сравнивая (122) и (117), получаем

и
 .
.
Чтобы вычислить  , можно получить величины
, можно получить величины  ,
,  , пользуясь оценками предварительных значений «шума»
, пользуясь оценками предварительных значений «шума»
 ,
,
полученных методом наименьших квадратов (или по методике «прогнозирования назад»), и, вычислив  - реккурентным путем по формулам, получающимся из (32), применяя к обеим частям равенства операции условного математического ожидания при фиксированных наблюдениях
- реккурентным путем по формулам, получающимся из (32), применяя к обеим частям равенства операции условного математического ожидания при фиксированных наблюдениях 
 ,
,  ,
,
где  .
.
Наконец, пользуясь (122) и (123), получаем точное выражение для безусловной функции правдоподобия
 . (124)
. (124)
Таким образом, принципиально открыт путь к получению оценок м.п. Если наряду с  неизвестно и
неизвестно и  , то уравнения правдоподобия будут иметь вид
, то уравнения правдоподобия будут иметь вид
 (125)
(125)
и
 (126)
(126)
где  .
.
Следует отметить, что  - всегда нелинейные функции параметров
- всегда нелинейные функции параметров  . Если оценки параметра уже найдены, то подставив их в величины , из (125) получаем оценку для
. Если оценки параметра уже найдены, то подставив их в величины , из (125) получаем оценку для 
 . (127)
. (127)
Сами же оценки параметров могут быть найдены как решения системы (126), в которой вместо следует подставить выражение, найденное из (125). Однако именно решение сисемы (126) представляет наибольшие трудности в силу ее нелинейности относительно . В отличие от с.п.АР(p) здесь не представляется возможным переход к линейной системе «квазимаксимального правдоподобия». Рассмотрим ситуацию с оцениванием в простейшем случае  .
.
Модель СС(1) определяется скалярным параметром  , который и подлежит оценке. Матрица A в этом случае представляет собой вектор-столбец с элементами
, который и подлежит оценке. Матрица A в этом случае представляет собой вектор-столбец с элементами  . Тогда
. Тогда  и из (125) и (126) получаем уравнение
и из (125) и (126) получаем уравнение
 (128)
(128)
Выразим величины  ,
,  через
через  и наблюдения
и наблюдения  ,
,  . Оценку предварительного значения «шума»
. Оценку предварительного значения «шума»  можно найти из равенства (119). Легко убедиться, что в нашем примере матрица B имеет вид
можно найти из равенства (119). Легко убедиться, что в нашем примере матрица B имеет вид
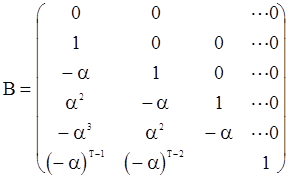 ,
,
а уравнение (119) можно записать в виде
где  ,
,  .
.
Тогда
 .
.
Величины  можно теперь определить из реккурентных уравнений
можно теперь определить из реккурентных уравнений
 , .
, .
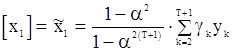
Решение этих уравнений приводит к формулам
 ,
,  .
.
После подстановки этих значений в (128) получим уравнение, содержащее кроме лишь наблюдения  . Однако точное решение полученного уравнения даже в этом простейшем частном случае мы найти не можем. Поэтому рассмотрим один из подходов к получению приближенных оценок м.п. вектора
. Однако точное решение полученного уравнения даже в этом простейшем частном случае мы найти не можем. Поэтому рассмотрим один из подходов к получению приближенных оценок м.п. вектора  .
.
Линеаризация модели. Рассмотрим в качестве «главной части» логарифма функции правдоподобия величину

и будем ее минимизировать. Представляя  по формуле Тейлора в окрестности точки, соответствующей предполагаемому значению параметра
по формуле Тейлора в окрестности точки, соответствующей предполагаемому значению параметра  получим приближенной равенство
получим приближенной равенство
 , (129)
, (129)
где  ,
,  .
.
В качестве  можно использовать оценку вектора
можно использовать оценку вектора  , предварительно полученную по методу моментов с помощью линейно сходящегося итеративного процесса (см. разд. 3.3.). Если P - матрица с элементами
, предварительно полученную по методу моментов с помощью линейно сходящегося итеративного процесса (см. разд. 3.3.). Если P - матрица с элементами  размера
размера  , то
, то  уравнений (129) можно представить в виде
уравнений (129) можно представить в виде
 ,
,
где  и
и  - векторы-столбцы с элементами. Поправка
- векторы-столбцы с элементами. Поправка  , минимизирующая
, минимизирующая  , находится теперь линейным методом наименьших квадратов. Полагая
, находится теперь линейным методом наименьших квадратов. Полагая 
 , получаем
, получаем
 .
.
Приравнивая этот вектор к нулевому находим
 . (130)
. (130)
Поскольку не является линейной функцией параметров , однократная поправка не обеспечит получение оценок наименьших квадратов. Поэтому полученные после первой поправки значения используются как новые предполагаемые значения, и процедура повторяется до получения сходящихся результатов. Сходимость оказывается более быстрой, если используются достаточно удачные начальные приближения. Если начальные приближения неудачны, то процесс вычисления параметров может оказаться расходящимся.
М.м.п. для смешанной модели АРСС( p,q ). Предположим теперь, что выходной сигнал порождается моделью (43), на входе которой имеем (как и в предыдущих случаях) гауссовский «шум»  с
с  и
и  . Считаем, что параметры авторегрессии
. Считаем, что параметры авторегрессии  обеспечивают стационарность выходного сигнала Y. Тогда Y - гауссовская стационарная с.п. с
обеспечивают стационарность выходного сигнала Y. Тогда Y - гауссовская стационарная с.п. с  и корреляционной функцией, определяемой уравнениями (46). Как в случае чистой с.п.СС(q), уравнения м.п. сложны и не поддаются непосредственному решению. Поэтому на практике можно использовать возможность представления с.п.АРСС(p,q) в виде чистой последовательности СС(¥) [2,с.264], которую в свою очередь заменяют конечной с.п.СС(Q):
и корреляционной функцией, определяемой уравнениями (46). Как в случае чистой с.п.СС(q), уравнения м.п. сложны и не поддаются непосредственному решению. Поэтому на практике можно использовать возможность представления с.п.АРСС(p,q) в виде чистой последовательности СС(¥) [2,с.264], которую в свою очередь заменяют конечной с.п.СС(Q):
 ,
,
где Q - невелико, а  - параметры, являющиеся функциями параметров
- параметры, являющиеся функциями параметров  исходной последовательности Y.
исходной последовательности Y.
Для оценки параметра  в модели (131) теперь можно использовать, например, описанную выше «линеаризацию модели». Иногда для получения оценок, близких к оценкам м.п., можно следовать более прямым путем. Расмотрим пример.
в модели (131) теперь можно использовать, например, описанную выше «линеаризацию модели». Иногда для получения оценок, близких к оценкам м.п., можно следовать более прямым путем. Расмотрим пример.
Модель АРСС(2,1) описывается разностным уравнением
 (132)
(132)
в котором оценке подлежит параметр  . Полагая
. Полагая  из (132) получаем
из (132) получаем
 ,
,
 ,
,
и т.д. Оценка вектора  может быть получена по наблюдениям
может быть получена по наблюдениям  путем минимизации величины
путем минимизации величины

БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. Журбенко И.Г. Кожевникова И.А. Стохастическое моделирование процессов. М.:Изд-во МГУ, 1990 148с.
2. Андерсон Т. Стохастический анализ временных рядов. М.:Мир, 1976 757с.
3. Бокс Дж. Дженникс Г. Анализ временных рядов. Прогноз и управление. М.:Мир, 1974 Вып.1 406с.
4. Дианова Р.С. Моделирование случайных процессов и оценка их параметров. Учеб.пособие. Моск. Авиац. Ин-т. М., 1989 44с.
5. Харин Ю.С. Степанова М.Д. Практикум на ЭВМ по математической статистике. Минск: Изд-во Университетское, 304с.
6. Ивченко Г.И. Медведев Ю.И. Математическая статистика. М.: Высш.шк. 1984, 248с.
7. Бендат Дж. Присон А. Прикладной анализ случайных данных. М.:Мир 1989 541с.
Приложение 1
ПРОВЕРКА ГИПОТЕЗЫ СЛУЧАЙНОСТИ
Входную с.п.  часто предролагают «чисто случайной», т.е считают с.в.
часто предролагают «чисто случайной», т.е считают с.в.  независимыми и одинаково распределенными. Это предположение, как правило, оправдано и вытекает из самого характера задачи, но иногда оно нуждается в проверке. Математически задачу можно сформулировать следующим образом: проверить гипотезу
независимыми и одинаково распределенными. Это предположение, как правило, оправдано и вытекает из самого характера задачи, но иногда оно нуждается в проверке. Математически задачу можно сформулировать следующим образом: проверить гипотезу  , где
, где  - некоторая функция распределения. Такую гипотезу назавают гипотезой случайности. Критерий согласия для проверки этой гипотезы можно построить [6] исходя из следующих соображений (далее предполагается, что вектор
- некоторая функция распределения. Такую гипотезу назавают гипотезой случайности. Критерий согласия для проверки этой гипотезы можно построить [6] исходя из следующих соображений (далее предполагается, что вектор  имеет непрерывное распределение).
имеет непрерывное распределение).
Если гипотеза случайности действительно имеет место, то компоненты вектора  «равноправны» и поэтому данные наблюдения не должны быть ни в каком смысле упорядоченны. Другими словами, ситуацию, соответствующую гипотезе
«равноправны» и поэтому данные наблюдения не должны быть ни в каком смысле упорядоченны. Другими словами, ситуацию, соответствующую гипотезе  , можно охарактеризовать как «полный хаос» или «полный беспорядок». При отклонениях от
, можно охарактеризовать как «полный хаос» или «полный беспорядок». При отклонениях от  исходные данные имеют тот или иной порядок. Следовательно, критерий проверки можно построить на основании статистик, измеряющих степень «беспорядка» исходных данных. Одной из таких статистик является число инверсий ввыборке. Эта статистика определяется следующим образом. Построим вариационный ряд
исходные данные имеют тот или иной порядок. Следовательно, критерий проверки можно построить на основании статистик, измеряющих степень «беспорядка» исходных данных. Одной из таких статистик является число инверсий ввыборке. Эта статистика определяется следующим образом. Построим вариационный ряд  выборки
выборки  . Говорят, что компоненты
. Говорят, что компоненты  и
и  образуют инверсию, если
образуют инверсию, если  , но
, но  стоит правее
стоит правее  в вариационном ряду т.е. наблюдению с меньшим номером соответствуют большее значение.
в вариационном ряду т.е. наблюдению с меньшим номером соответствуют большее значение.
Если для  положить
положить
то число инверсий  , образованных компонентный
, образованных компонентный  (в вариационном ряду левее
(в вариационном ряду левее  стоит
стоит  элементов выборки с большими номерами), определится равенством
элементов выборки с большими номерами), определится равенством
Тогда общее число инверсий  для выборки
для выборки  будет задано равенство
будет задано равенство
 .
.
Статистика  является естетственной мерой «беспорядка» среди наблюдений и ее можно использовать для проверки гипотезы
является естетственной мерой «беспорядка» среди наблюдений и ее можно использовать для проверки гипотезы  . Краиние случаи, когда вариационный ряд имеет вид
. Краиние случаи, когда вариационный ряд имеет вид  или
или  естетственно рассматривать как свидетельства «полного отсутствия беспорядка», т.е. противоречашее гипотезе . В первом случае статистика принимает минимальное значение, равное 0, а во втором случае она максимальна и равна
естетственно рассматривать как свидетельства «полного отсутствия беспорядка», т.е. противоречашее гипотезе . В первом случае статистика принимает минимальное значение, равное 0, а во втором случае она максимальна и равна  . Таким образом, слишком малые и слишком большие значения
. Таким образом, слишком малые и слишком большие значения  (близкие к
(близкие к  ) естетственно рассматривать как критические для гипотезы
) естетственно рассматривать как критические для гипотезы  . Чтобы определить числовые характеристики этого критерия, найдем распределение статистики
. Чтобы определить числовые характеристики этого критерия, найдем распределение статистики  при гипотезе .
при гипотезе .
Из соображений симметрии ясно, что при гипотезе любое из  относительных расположений элементов выборки в соответствующем вариационном ряду имеет одинаковую вероятность
относительных расположений элементов выборки в соответствующем вариационном ряду имеет одинаковую вероятность  . Введенная с.в.
. Введенная с.в.  определяется расположением с.в.
определяется расположением с.в.  по отношению к
по отношению к  в вариационном ряду и не зависит от относительного расположения последних между собой, т.е
в вариационном ряду и не зависит от относительного расположения последних между собой, т.е  при любом
при любом  не зависит от
не зависит от  взаимно независимы. При этом величина может с одной и той же вероятностью
взаимно независимы. При этом величина может с одной и той же вероятностью  принимать значения
принимать значения  , поэтому ее производящая функция имеет вид
, поэтому ее производящая функция имеет вид
 ,
,
а производящая функция статистики  представлена следующим образом:
представлена следующим образом:
 .
.
Отсюда имеем


Итак, среднее значение статистики  при нулевой гипотезе совпадает с серединой промежутка
при нулевой гипотезе совпадает с серединой промежутка  , и в критическую область
, и в критическую область  следует включать все целые точки этого промежетка, достаточно удаленные от середины. При заданном уровне значимости
следует включать все целые точки этого промежетка, достаточно удаленные от середины. При заданном уровне значимости  в качестве области принятия нулевой гипотезы можно взять промежуток
в качестве области принятия нулевой гипотезы можно взять промежуток
где величины  определяются из условия
определяются из условия
Разлагая функцию  в ряд по степеням
в ряд по степеням  и вычисляя коэффициент при
и вычисляя коэффициент при  , можно вычислить вероятности
, можно вычислить вероятности  при заданном
при заданном  и любом
и любом  и использовать их для нахождения границы
и использовать их для нахождения границы  .
.
Приведем небольшую таблицу из работы [7], содержащую  - процентные точки функции распределения с.в. .
- процентные точки функции распределения с.в. .
Таблица
Процентные точки рапределения числа инверсий
| T |
| |||||
| 0,99 | 0,975 | ,095 | 0,05 | 0,025 | 0,01 | |
| 10 | 9 | 11 | 13 | 31 | 33 | 35 |
| 12 | 16 | 18 | 21 | 44 | 47 | 49 |
| 14 | 24 | 27 | 30 | 60 | 63 | 66 |
| 16 | 34 | 38 | 41 | 78 | 81 | 85 |
| 18 | 45 | 50 | 54 | 98 | 102 | 107 |
| 20 | 59 | 64 | 69 | 120 | 125 | 130 |
| 30 | 152 | 162 | 171 | 263 | 272 | 282 |
| 40 | 290 | 305 | 319 | 460 | 474 | 489 |
| 50 | 473 | 495 | 514 | 710 | 729 | 751 |
| 60 | 702 | 731 | 756 | 1013 | 1038 | 1067 |
| 70 | 977 | 1014 | 1045 | 1369 | 1400 | 1437 |
| 80 | 1299 | 1344 | 1382 | 1777 | 1815 | 1860 |
| 90 | 1668 | 1721 | 1766 | 2238 | 2283 | 2336 |
| 100 | 2083 | 2145 | 2198 | 2751 | 2804 | 2866 |

Примечание.Значения  такие, что
такие, что  , где - общее число наблюдений.
, где - общее число наблюдений.
Пусть имеется следующая последовательность  наблюдений некоторой с.в.
наблюдений некоторой с.в.
| 1. 5,5 | 6. 5,7 | 11. 6,8 | 16. 5,4 | ||
| 2. 5,1 | 7. 5,0 | 12. 6,6 | 17. 6,8 | ||
| 3. 5,7 | 8. 6,5 | 13. 4,9 | 18. 5,8 | ||
| 4. 5,2 | 9. 5,4 | 14. 5,4 | 19. 6,9 | ||
| 5. 4,8 | 10. 5,8 | 15. 5,9 | 20. 5,5 |
Гипотеза заключается в том, что эти наблюдения представляют собой независимые исходы (измерения) с.в.  , и ее надо проверить при заданном уровне значимости
, и ее надо проверить при заданном уровне значимости  . Подсчитаем число инверсий в последовательности
. Подсчитаем число инверсий в последовательности
Общее число инверсий  . Область принятия имеет вид
. Область принятия имеет вид
 .
.
Из таблицы при  находим
находим  и
и  . Следовательно, гипотеза должна быть отвергнута с уровнем значимости 5%, т.к.
. Следовательно, гипотеза должна быть отвергнута с уровнем значимости 5%, т.к.  не попадает в промежуток между 64 и 125ю
не попадает в промежуток между 64 и 125ю
Для большой «длины» релизации применяют простой асимптотический вариант этого критерия. Используя производящую функцию  , можно показать, чтохарактеристическая функция нормированной статистики
, можно показать, чтохарактеристическая функция нормированной статистики  сходится при
сходится при  и любом конечном
и любом конечном  к
к  - характеристической функции нориального распределения. Это означает, что распределение величины
- характеристической функции нориального распределения. Это означает, что распределение величины  слабо сходится к нормальному закону
слабо сходится к нормальному закону  при .
при .
Последний результат дает возможность сформулировать следующее правило проверки  , когда значение велико: для заданного уровня значимости
, когда значение велико: для заданного уровня значимости  определяют число
определяют число  из условия
из условия  ; по фактически наблюдающимся данным
; по фактически наблюдающимся данным  вычисляют значение
вычисляют значение  числа инверсий в выборке. Если
числа инверсий в выборке. Если  , то гипотезу отвергают ка противоречащую исходным данным. В противном случае признают, что гипотеза независимости и одинаковой распределенности наблюдений согласуется с опытными данными.
, то гипотезу отвергают ка противоречащую исходным данным. В противном случае признают, что гипотеза независимости и одинаковой распределенности наблюдений согласуется с опытными данными.
Вероятность ошибочно отвергнуть при этом истинную гипотезу 
 .
.
Это правило можно использовать уже при  .
.
Приложение 2
ПРОВЕРКА СТАЦИОНАРНОСТИ
Изложенные в основном тексте настоящего пособия методы статистической обработки временных рядов подразумевают стационарность последних. Стацинарность процесса играет важную роль потому, что методы анализа нестационарных процессов существенно более громозки, чем в стационарном случае. Часто стационарность вытекает из физической природы процесса, когда порождающие его факторы не зависят от времени. Однако далеко не всегда имеется априорная информация, позволяющая считать исследуемый процесс стационарным. Даже если временной ряд получается путем статического моделирования на компьютере, то не всегда удается обеспечить его стационарность с самого начала процесса моделирования. В частности, при моделировании с.п.АРСС с негауссовским шумом начальный «отрезок» выходного процесса может быть далек от стационарности, и возникает необходимость выбора для статистической обработки участка реализации, соответствующего установившемуся (стационарному) режиму. В Любом случае когда нужно убедится в стационарности наблюдений, поступивших для обработки, приходится использовать один из статистических критериев для проверки гипотезы стационарности.
Стационарность в узком смысле означает, как известно, независимость конечномерных распределений от сдвига по временной оси. Это значит, что функция распределния  процесса
процесса  удовлетворяет условию
удовлетворяет условию

для любых значений аргументов и таких любых  и
и  , что и
, что и  принадлежат допустимому множеству временного параметра . Очевидно, что в этом случае для любой измеримрй функции
принадлежат допустимому множеству временного параметра . Очевидно, что в этом случае для любой измеримрй функции  случайные величины
случайные величины
 и
и 
одинаково распределены, а моментные функции, если они существуют, не зависят от сдвига по времени.
Если исследователя интересует не сами конечномерные распределения процесса  , а лишь его моментные функции, то целесообразно пользоваться определениями стационарности, основанными на свойствах моментных функций.
, а лишь его моментные функции, то целесообразно пользоваться определениями стационарности, основанными на свойствах моментных функций.
Стационарным в широком смысле k-го порядка называют процесс , у которого моментные функции до k-го порядка включительно существуют и не зависят от сдвига по времени. При этом чаще всего речь идет о процессах, стационарных в широком смысле 2-го порядка, которые называются просто стационарными в широком смысле. Для них  и
и  .
.
Отметим, что если процесс стационарен в узком смысле и обладает моментными функциями до k-го порядка, то он является стационарным и в широком смысле k-го порядка. В случае гауссовских процессов стационарность в широком смысле 2-го порядка будет означать и стационарность в узком смысле, поскольку все конечномерные распределения гауссовского процесса вполне определяются двумя первыми моментными функциями: средним значением и корреляционной функцией.
Перейдем к рассмотрению задачи проверки гипотезы стационарности по существу. Мы используем знакомый из предшествующего раздела критерий инверсий. К сожалению, при построении такого критерия не удается обойтись только одной реализацией. Итак, предположим, что исследуется случайный процесс с дискретным временем, т.е. случайная последовательность  , относительно которой нужно проверить гипотезу
, относительно которой нужно проверить гипотезу  : «с.п.
: «с.п.  стационарна в узком смысле». Рассмотрим независимых наблюдений последовательности
стационарна в узком смысле». Рассмотрим независимых наблюдений последовательности  , причем k-e наблюдение имеет длину nk, где n- некоторое положительное число. Тогда первое наблюдение представляет собой реализацию с.п.
, причем k-e наблюдение имеет длину nk, где n- некоторое положительное число. Тогда первое наблюдение представляет собой реализацию с.п.  длины
длины 

k-ое наблюдение - реализацию длины kn
а последнее наблюдение (с номером ) - это реализация длины nT
С помощью некоторой измеримой функции n переменных  построим используя n последниу значения каждой из полученных реализаций, величины:
построим используя n последниу значения каждой из полученных реализаций, величины:
 .
.
Если в них значения  заменить случайными случайными величинами
заменить случайными случайными величинами  из последовательности
из последовательности  , являющейся k-ой (по порядку) «копией» исследуемой с.п.
, являющейся k-ой (по порядку) «копией» исследуемой с.п.  , то получим случайные величины
, то получим случайные величины

Они будут независимы в совокупности, т.к. порождаются независимыми «копиями» с.п.  . В случае же справедливости гипотезы
. В случае же справедливости гипотезы  , т.е. в случае стационарности в узком смысле с.п. , они будут одинаково распределенными. Таким образом, гипотеза
, т.е. в случае стационарности в узком смысле с.п. , они будут одинаково распределенными. Таким образом, гипотеза  будет подтверждатся или отвергатся одновременно с принятием или отклонением гипотезы случайности для с.в.
будет подтверждатся или отвергатся одновременно с принятием или отклонением гипотезы случайности для с.в.  при любой генерирующей их функции
при любой генерирующей их функции  . Для проверки же гипотезы случайности можно использовать изложенный в прил.1 критерий инверсий.
. Для проверки же гипотезы случайности можно использовать изложенный в прил.1 критерий инверсий.
При описанном выше подходе к проверке гипотезы стационарности функцию цедесообразно выбирать так, чтобы величины  представляли собой выборочные моменты. Если существует, в частности, моментная функция r-го порядка и гипотеза
представляли собой выборочные моменты. Если существует, в частности, моментная функция r-го порядка и гипотеза  верна, то выбирая функцию
верна, то выбирая функцию
в качестве будет иметь оценку начального момента r-го порядка
При достаточно слабых ограничениях эта оценка состоятельна:
 при
при  .
.
Поэтому при истинности гипотезы  величины не должны существенно зависеть от времени (от индекса k). Если же они сильно колеблются в зависимости от k, то это свидетельствует о том, что наблюдения не согласуются гипотезой стационарности и можно не пренебрегать к использованию критерия инверсий. В случае отсутствия явный колебаний в совокупности
величины не должны существенно зависеть от времени (от индекса k). Если же они сильно колеблются в зависимости от k, то это свидетельствует о том, что наблюдения не согласуются гипотезой стационарности и можно не пренебрегать к использованию критерия инверсий. В случае отсутствия явный колебаний в совокупности  придется пользоваться критерием инверсий.
придется пользоваться критерием инверсий.
На практике для проверки гипотезы можно рекомендовать построение критерия инверсий на основе совокупности оценок момента второго порядка
Дата: 2019-04-23, просмотров: 323.