Вид соединения элементов, при котором выходное воздействие одного элемента передается на вход другого элемента, называется прямой связью. Прямая связь между двумя элементами системы может осуществляться непосредственно или через другие ее элементы. В случае опосредованного воздействия выходной сигнал одного элемента поступает на вход другого с передаточным коэффициентом промежуточного элемента.
Вид соединения элементов, при котором выходное воздействие одного элемента передается на вход того же самого элемента, называется обратной связью. Обратная связь может осуществляться либо непосредственно от выхода элемента системы на его вход, либо через другие элементы данной системы. Обратная связь бывает внешняя и внутренняя. Внешней или главной называется такая связь, посредством которой осуществляется передача части выходного сигнала всей системы управления на ее вход. Внутренние или местные обратные связи соединяют выход отдельных элементов или групп последовательно соединенных элементов с их входом. Различают положительную и отрицательную обратную связь. Если под действием обратной связи первоначальное отклонение управляемой величины у, вызванное возмущающими воздействиями ш, уменьшается, то считают, что имеет место отрицательная обратная связь. В противном случае говорят о положительной обратной связи. Следовательно, положительная обратная связь усиливает действие входного сигнала, отрицательная — ослабляет.
Положительная обратная связь используется во многих технических устройствах для увеличения коэффициента передачи. В экономике на принципе положительной обратной связи основаны системы материального стимулирования. Положительными являются обратные связи в схеме межотраслевого баланса.
Примером использования отрицательной обратной связи является термостат. Обычно положительная обратная связь приводит к неустойчивой работе системы, т. к. соответствует увеличению возникшего в системе отклонения. Отрицательная обратная связь способствует восстановлению равновесия в системе. Поэтому системы с отрицательной обратной связью являются относительно устойчивыми.
Если сигнал обратной связи пропорционален установившемуся значению входной величины и не зависит от времени и скорости ее изменения, то такая обратная связь называется жесткой. Сигналы гибкой обратной связи пропорциональны скорости изменения входной величины. Мерой величины обратной связи служит коэффициент обратной связи.
Обратная связь является одним из важнейших понятий кибернетики, оно помогает понять многие явления, происходящие в системах управления любой природы. Важную роль обратная связь играет в распознавании образов и принятии решений. Положительную обратную связь используют в системах обучения. В организационных системах обратные связи используются для выработки управляющих сигналов, для выработки критерия эффективности управления и оценки качества управления. В биологических системах обратная связь обеспечивает поддержание в нормальном состоянии основных показателей жизнедеятельности: температуры и массы тела, уровня сахара и гемоглобина в крови, другие. В экономических системах обратная связь играет важную роль в обеспечении эффективного управления.
Свойства систем управления существенно зависят от способа формирования управляющих воздействий. При этом полезно рассмотреть разомкнутые и замкнутые системы.
3.3 Виды управления. Способы и задачи управления
Жесткое управление
Под жестким управлением понимается воздействие на систему или процесс, направленное на достижение заданного типа поведения. Процесс управления характеризуется наличием разомкнутого контура, особенность которого состоит в том, что достижение результата не сообщается в устройство управления (рис. 3.2).
Жесткое управление реализуется в предположении о полной определенности условий внешней среды.
Назначение устройства управления состоит в следующем: на вход программного блока поступает задающее воздействие  (t). Программный блок транслирует систему команд т(t), которые исполнительный блок преобразует в последовательность управляющих воздействий и w(t), цель которых состоит в том, чтобы управляемый параметр у (t) максимально соответствовал задающему воздействию (t). Поскольку обычно на процесс влияют внешние воздействия x(t), они должны по возможности учитываться и заранее компенсироваться устройством управления. Но так как предвидеть все возмущения заранее невозможно, выполнения равенства (t)=y(t) добиться трудно. Алгоритмическое и техническое решение системы жесткого управления относительно простое, но область его применения на практике весьма ограничена: простейшие автоматические технические устройства, жесткое администрирование
(t). Программный блок транслирует систему команд т(t), которые исполнительный блок преобразует в последовательность управляющих воздействий и w(t), цель которых состоит в том, чтобы управляемый параметр у (t) максимально соответствовал задающему воздействию (t). Поскольку обычно на процесс влияют внешние воздействия x(t), они должны по возможности учитываться и заранее компенсироваться устройством управления. Но так как предвидеть все возмущения заранее невозможно, выполнения равенства (t)=y(t) добиться трудно. Алгоритмическое и техническое решение системы жесткого управления относительно простое, но область его применения на практике весьма ограничена: простейшие автоматические технические устройства, жесткое администрирование

Рисунок 3.2 Разомкнутый контур управления
Регулирование
Регулирование представляет собой процесс, в ходе которого регулируемый параметр у измеряется и сравнивается с  . При отклонении этих величин регулятор через исполнительный блок воздействует регулирующей величиной w на процесс или объект с тем, чтобы обеспечить выполнение условия (t)=y(t). Для регулирования характерно наличие замкнутого контура (рис.3.3).
. При отклонении этих величин регулятор через исполнительный блок воздействует регулирующей величиной w на процесс или объект с тем, чтобы обеспечить выполнение условия (t)=y(t). Для регулирования характерно наличие замкнутого контура (рис.3.3).
Различаются два основных вида систем регулирования:
1. регулирование по отклонению имеет место, когда достигнутый результат у через цепь обратной связи после измерения поступает в регулирующее устройство, которое генерирует соответствующий управляющий сигнал т ( t):
· регулирование по отклонению от управляемой величины реализуется в системах стабилизации. Задачами стабилизации являются задачи поддержания выходных величин у (t) вблизи некоторых неизменных заданных значений Y. Так, задачи стабилизации решаются при осуществлении технологических операций, так как соответствие выполняемых работ технологическому процессу является необходимым условием получения продукции с заданными свойствами. В системах энергоснабжения должны быть стабилизированы напряжение и частота тока в сети вне зависимости от изменения потребления электроэнергии.
· другим типом регулирования по отклонению являются системы с программным управлением. Задачи такого типа возникают, когда необходимо, чтобы состояние управляемого объекта удерживалось вблизи изменяющегося во времени по заранее заданному закону значению у(t). Задачи программного управления возникают в производственных системах при выполнении работ в соответствии с планом. Системы программного управления широко применяются в технике для автоматизации технологических процессов (станок с программным управлением);
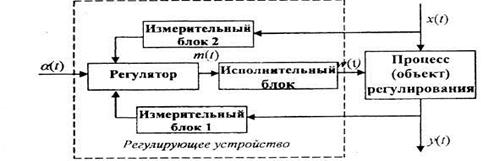
Рисунок 3.3 Замкнутая система регулирования
2. регулирование по возмущению происходит, если возмущения х (t) учитываются, измеряются и компенсируются регулятором по контуру, включающему измерительный блок 2 (см. рис.3.3).
Часто встречаются ситуации, когда закон изменения во времени заданного состояния системы заранее неизвестен, а определяется в ходе самого процесса в соответствии с внешним сигналом. Система управления, предназначенная для изменения состояния Y(t) управляемого объекта по закону, задаваемому внешним, неизвестным заранее сигналом, называется следящей системой. При этом внешний сигнал называется ведущей величиной. Примером следящего управления является «задача преследования» из области военной кибернетики, так же, как и следящее управление с упреждением (управление зенитным орудием). Упреждающим может быть и управление экономическим объектом, например, при решении задачи бездефицитного снабжения потребителей деталями со склада, другие задачи управления запасами.
Дата: 2019-03-05, просмотров: 353.