Очень важным моментом при синтезе оптимальных систем управления является правильная постановка цели управления как физическая так и формализованная, т.е. записанная в виде математических выражений.
В качестве функционала цели (критерия оптимальности) могут быть приняты различные технические или технико–экономические показатели.
Например, он может отражать производительность, КПД, прибыль, при этом оптимальное управление должно обеспечивать максимум критерия; либо отражать потери: расход энергии, топлива, средств и т.д., и, тогда, оптимальное управление должно обеспечивать минимум.
Критерий оптимальности – это оценка достижения цели управления в формализованном виде, поэтому он имеет количественный характер и показывает, насколько один вариант лучше или хуже другого.
Основными критериями качества автоматизированных систем являются: стоимость разработки, изготовления и эксплуатации систем, качество функционирования, надежность, потребляемая энергия, масса, объем и т.д.
Каждый из этих критериев является некоторой функцией нескольких переменных, характеризующие систему в целом.
Приведем примеры некоторых критериев оптимального управления.
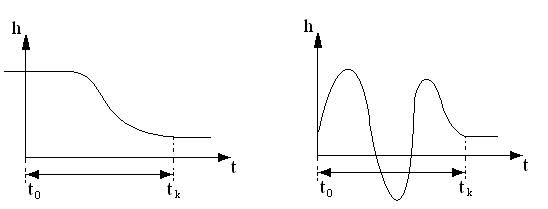
1. Время переходного процесса
2. Интегральные оценки качества ведения процесса
 ,
,
где  ;
;
 - отклонение выходной переменной от заданной.
- отклонение выходной переменной от заданной.
Оптимальная по точности в динамических системах (при единичном воздействии) или при обработке ненулевых начальных условий.
В общем случае можно использовать обобщенную интегральную оценку, когда рассматривается отклонение не только выходной переменной y(t), но и ее производной. Этот критерий оптимальности может быть использован для оценки качества адаптации систем в условиях неопределенности.
3. При случайных сигналах при построении критерия можно использовать среднее значение квадрата ошибки системы ε2 или среднее значение квадрата выходной координаты.
 ,
,
 ,
,
где ε(t) и y(t) – случайные процессы ошибки и выходной координаты.
Такая система является оптимальной по точности в статистическом смысле.
4. При наличии возмущающих воздействий z(t), в качестве критериев оптимизации можно принять функционалы, характеризующие взаимную корреляцию между координатами выхода y(t0 и возмущениями z(t).
Построенная при этом система управления будет оптимальной по точности в динамике при возмущениях z(t).
5. При разработке системы, оптимальной по расходу энергии на управление, критерий имеет вид:
 ,
,
где u(t), i(t) – напряжение и сила тока источника,  ;
;
 , R – сопротивление электрической цепи.
, R – сопротивление электрической цепи.
Поскольку при разработке систем оптимального управления рассматривается иерархическая структура объекта (задачи микро и макроуровней), то критерий задачи верхнего уровня иерархии имеет вид скалярной целевой функции, обобщающей все многообразие целей, либо векторной функции.
Частные (локальные) критерии могут вступать между собой в антагонистические отношения. Например:
Необходимо разработать систему качественно функционирующую I1, дешевую по стоимости I2, потребляющую мало энергии I3, максимально надежную I4, простую по конструкции I5. Критерий I4 противоречит I2 и I5.
Дата: 2019-03-05, просмотров: 342.