Исследуемый процесс может быть интерпретирован как дискретная цепь Маркова, если ему может быть дано следующее общее описание [3].
 Имеется система, которая в каждый момент времени может находиться в одном из т состояний. Смена системой состояния (шаг процесса) осуществляется только в фиксированные моменты времени. Известны или могут быть вычислены вероятности того, что система, которая до очередного шага была в состоянии Аi (i = 1, 2, ... , т), в результате этого шага перейдет в состояние Аj (j = 1, 2, ... , т). Вероятность того, что система окажется в любом состоянии за очередной шаг процесса зависит только от состояния системы до очередного шага и не зависит от того, как именно система оказалась в этом состоянии. Переходы системы в возможные состояния составляют полную группу несовместных событий (в общем случае число состояний т может быть в принципе бесконечным, однако мы будем рассматривать только случай конечного числа т).
Имеется система, которая в каждый момент времени может находиться в одном из т состояний. Смена системой состояния (шаг процесса) осуществляется только в фиксированные моменты времени. Известны или могут быть вычислены вероятности того, что система, которая до очередного шага была в состоянии Аi (i = 1, 2, ... , т), в результате этого шага перейдет в состояние Аj (j = 1, 2, ... , т). Вероятность того, что система окажется в любом состоянии за очередной шаг процесса зависит только от состояния системы до очередного шага и не зависит от того, как именно система оказалась в этом состоянии. Переходы системы в возможные состояния составляют полную группу несовместных событий (в общем случае число состояний т может быть в принципе бесконечным, однако мы будем рассматривать только случай конечного числа т).
Если исследуемый процесс может быть описан подобным образом, то для его моделирования могут быть использованы методы теория дискретных цепей Маркова.
Постановка задачи
Из изложенного выше также следует, что для применения методов теории дискретных цепей Маркова оперативно-тактическая постановка задачи должна быть сделана таким образом, чтобы имелась возможность выявить:
а) что является системой;
б) каковы возможные состояния системы;
в) что является шагом процесса, и в какие моменты времени осуществляются шаги;
г) какие переходы системы из состояния в состояние возможны за один шаг.
Описание процесса должно также дать возможность определить вероятности переходов системы на каждом шаге.
Осуществляя оперативно-тактическую постановку задачи, следует иметь в виду, что набор состояний системы, учитываемых в модели, определяется, в первую очередь, особенностями процесса. При этом в зависимости от целей действия сил и целей моделирования некоторые состояния можно объединить в одно состояние и тем самым упростить модель. И наоборот, чтобы добиться «марковости» процесса, т. е. возможности учитывать при определении вероятностей переходов системы только ее состояние до очередного шага, часто оказывается необходимым «дробить», увеличивать число возможных состояний системы.
В принципе любой не Марковский процесс может быть представлен как Марковский за счет соответствующего увеличения числа состояний системы.
Рассмотрим некоторые примеры.
Пример 1. По группе кораблей противника, состоящей из корабля ядра и двух кораблей охранения, планируется нанесений нескольких последовательных ударов ударными группами, применяющими различное оружие.
Различные виды оружия обладают разной вероятностью поражения корабля ядра и кораблей охранения, причем эта вероятность меняется в зависимости от числа боеспособных кораблей охранения.
Цель удара: поражение корабля ядра, цель моделирования: обоснование рациональной последовательности ударов.
В данном случае имеем:
а) Система – группа кораблей противника в составе корабля ядра и двух кораблей охранения.
б) Состояния системы:
А1 – корабль ядра и корабли охранения не поражены;
А2 – корабль ядра не поражен, один корабль охранения поражен,
А3 – корабль ядра не поражен, оба корабля охранения поражены;
А4 – корабль ядра поражен;
в) Шаг процесса: нанесение удара очередной ударной группой; момент шага: момент нанесения удара.
г) Система за один шаг способна переходить из состояния с меньшим номером в одно из состояний с большим номером. Обратные переходы невозможны. Однако система способна в результате шага оставаться в прежнем состоянии. Данную задачу иллюстрирует граф переходов (рис. 3.4.1).
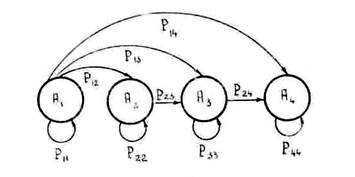
Рис. 3.4.1. Графическое представление модели задачи
Пример 2. В отличие от условий примера 1 целью ударов является поражение всех кораблей противника. В этом случае учитываемыми в модели состояниями системы являются:
А1, А2, А3 – корабль ядра не поражен, поражены соответственно ноль, один, два корабля охранения;
А4, А5, А6 – корабль ядра поражен, поражены соответственно ноль, один, два корабля охранения.
Пример 3. Если в условиях примера 1 считать, что вероятность поражения корабля ядра при очередном ударе существенно зависит от такого элемента «предыстории процесса», как повреждения, полученные этим кораблем при предыдущих ударах, то необходимо ввести состояния системы, связанные с повреждением корабля ядра. Эти повреждения, например, могут требовать снижения скорости группы кораблей противника ниже определенного предела. В этом случае в модели требуется учесть следующие состояния системы:
А1, А2, А3 – корабль ядра не поврежден, поражены соответственно ноль, один, два корабля охранения;
А4, А5, А6 – корабль ядра поврежден, поражены соответственно ноль, один, два корабля охранения;
А7 — корабль ядра поражен.
В примере 1 по сравнению с примером 2 состояния А4, А5, А6 объединены в одно состояние А4. Различие в числе учитываемых состояний определяется различием в целях действия сил.
В примере 3 для сохранения «марковости» процесса введена группа состояний, учитывающих повреждение корабля ядра.
Пример 4. Подводная лодка передает сообщения на командный пункт (КП), осуществляя для повышения надежности передачи сообщения несколько повторных передач радиограммы (РДО) с одним и тем же сообщением.
В процессе передачи сообщения подводная лодка может быть обнаружена и атакована противолодочными силами противника. В этом случае выполнить запланированное число передач РДО подводная лодка может, только оторвавшись от преследования.
Цель использования средств связи подводной лодки – передача на КП сообщения. Цель моделирования – обоснование лучшего по надежности способа передачи подводной лодкой сообщения в условиях противодействия противолодочных сил противника.
В данном случае имеем:
а) Система – подводная лодка и КП.
б) Состояния системы:
А1 – сообщение на КП не получено; подводная лодка противолодочными силами не поражена;
А2 – сообщение на КП получено;
А3 – сообщение на КП не получено; подводная лодка поражена противолодочными силами.
в) Шаг системы: передача подводной лодкой РДО. Шаг системы имеет продолжительность, равную математическому ожиданию промежутка времени между началами двух смежных передач РДО. При этом математическое ожидание времени уклонения подводной лодки от преследования включается в продолжительность шага.
г) Система способна из состояния А1 переходить в состояние А2 или А3. Из состояний А2 и А3 переход ни в какие другие состояния невозможен, так как при этом моделируемый процесс заканчивается: в первом случае ввиду достижения цели действий, во втором – из-за поражения подводной лодки. Возможно, что в результате шага система останется в прежнем состоянии.
Пример 5. Дополнительно к условиям примера 4 следует учесть, что возможность осуществления дальнейших передач РДО непораженной подводной лодкой существенно зависит от того, как подводная лодка пришла в состояние А1. А именно: если подводная лодка хотя бы один раз была обнаружена ранее, то противник усиливает противолодочную оборону в данном районе, отчего вероятность обнаружения подводной лодки возрастает.
В этом случае следует считать:
а) Система — подводная лодка, КП, противолодочные силы противника.
б) Состояния системы:
А1 – сообщение на КП не получено, подводная лодка не поражена, ранее противником не обнаруживалась; противолодочная оборона в районе не усилена;
А2 – сообщение на КП не получено, подводная лодка не поражена, противником ранее обнаруживалась; противник усилил противолодочную оборону в районе;
А3 – сообщение на КП получено;
А4 – сообщение на КП не получено, подводная лодка поражена противником.
в) Шаг системы: передача подводной лодкой РДО.
г) Система способна переходить из состояния А1 или А2 во все состояния с большим номером. Из состояний А3 и А4 переход ни в какие другие состояния невозможен. Данную задачу иллюстрирует граф переходов (рис. 3.4.2), в котором дополнительно к условиям задачи принято, что при состоянии системы А2 противник принимает лишь меры, затрудняющие подводной лодке использовать средства радиосвязи).
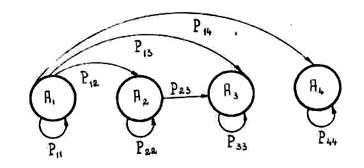
Рис. 3.4.2. Графическое представление модели задачи
Последний пример иллюстрирует следующее правило определения элементов обстановки, которые должны включаться в понятие система:
систему составляют все те элементы обстановки, которые способны изменяться от шага к шагу, изменяя при этом возможность достижения цели действия сил. Элементы обстановки, которые не способны изменяться в результате шага, но влияют на достижение цели действий (например, противолодочные силы противника в примере 4), учитываются при определении вероятностей переходов.
Заметим, что в приведенных выше примерах не рассматривались способы определения необходимых вероятностей: поражения объектов противника, обнаружения подводной лодки и т. д. Мы будем считать все необходимые вероятности событий известными.
Оперативно-тактическую постановку задачи осуществляет командир, а интерпретацию процесса как дискретной цепи Маркова должен осуществлять специалист по исследованию операций.
Вряд ли такой специалист будет находиться на корабле, поэтому и интерпретация процесса как дискретной цепи Маркова, и решение задачи должно быть возложено на БИУС. Для этого в БИУС:
- должна иметься достоверная и полная оперативная информация о противнике, а также своих силах и средствах,
- в базах данных БИУС должны храниться априорные вероятности наступления различных событий либо рассчитанные, либо полученные в результате накопления и обработки статистических данных,
- БИУС должна быть интеллектуальной системой, способной «понимать» поставленную командиром задачу и преобразовывать ее в форму, удобную для решения методами теории дискретных цепей Маркова.
Показатели эффективности, вычисляемые методами теории
дискретных цепей Маркова
Рассматриваемые методы позволяют находить распределение состояний системы на различных шагах процесса. А это открывает возможность с помощью методов теории вероятностей находить различные вероятностные характеристики, используемые в качестве показателей эффективности.
Обычно рассматриваемые методы применяются для определения следующих вероятностных характеристик:
– вероятности того, что цель действия сил (своих или противника) будет достигнута за заданное число шагов или за заданное время процесса;
– вероятности того, что цель действия сил будет достигнута именно на заданном шаге или именно в заданный момент;
– математического ожидания числа шагов, необходимых для достижения цели действий;
– математического ожидания времени, необходимого для достижения цели действий;
– математического ожидания ущерба, причиняемого противнику, или ущерба, причиняемого противником нашим силам за заданное число шагов процесса.
Дата: 2019-03-05, просмотров: 353.