Понятие о дискретных цепях Маркова
Исследуемый процесс может быть интерпретирован как дискретная цепь Маркова, если ему может быть дано следующее общее описание [3].
 Имеется система, которая в каждый момент времени может находиться в одном из т состояний. Смена системой состояния (шаг процесса) осуществляется только в фиксированные моменты времени. Известны или могут быть вычислены вероятности того, что система, которая до очередного шага была в состоянии Аi (i = 1, 2, ... , т), в результате этого шага перейдет в состояние Аj (j = 1, 2, ... , т). Вероятность того, что система окажется в любом состоянии за очередной шаг процесса зависит только от состояния системы до очередного шага и не зависит от того, как именно система оказалась в этом состоянии. Переходы системы в возможные состояния составляют полную группу несовместных событий (в общем случае число состояний т может быть в принципе бесконечным, однако мы будем рассматривать только случай конечного числа т).
Имеется система, которая в каждый момент времени может находиться в одном из т состояний. Смена системой состояния (шаг процесса) осуществляется только в фиксированные моменты времени. Известны или могут быть вычислены вероятности того, что система, которая до очередного шага была в состоянии Аi (i = 1, 2, ... , т), в результате этого шага перейдет в состояние Аj (j = 1, 2, ... , т). Вероятность того, что система окажется в любом состоянии за очередной шаг процесса зависит только от состояния системы до очередного шага и не зависит от того, как именно система оказалась в этом состоянии. Переходы системы в возможные состояния составляют полную группу несовместных событий (в общем случае число состояний т может быть в принципе бесконечным, однако мы будем рассматривать только случай конечного числа т).
Если исследуемый процесс может быть описан подобным образом, то для его моделирования могут быть использованы методы теория дискретных цепей Маркова.
Постановка задачи
Из изложенного выше также следует, что для применения методов теории дискретных цепей Маркова оперативно-тактическая постановка задачи должна быть сделана таким образом, чтобы имелась возможность выявить:
а) что является системой;
б) каковы возможные состояния системы;
в) что является шагом процесса, и в какие моменты времени осуществляются шаги;
г) какие переходы системы из состояния в состояние возможны за один шаг.
Описание процесса должно также дать возможность определить вероятности переходов системы на каждом шаге.
Осуществляя оперативно-тактическую постановку задачи, следует иметь в виду, что набор состояний системы, учитываемых в модели, определяется, в первую очередь, особенностями процесса. При этом в зависимости от целей действия сил и целей моделирования некоторые состояния можно объединить в одно состояние и тем самым упростить модель. И наоборот, чтобы добиться «марковости» процесса, т. е. возможности учитывать при определении вероятностей переходов системы только ее состояние до очередного шага, часто оказывается необходимым «дробить», увеличивать число возможных состояний системы.
В принципе любой не Марковский процесс может быть представлен как Марковский за счет соответствующего увеличения числа состояний системы.
Рассмотрим некоторые примеры.
Пример 1. По группе кораблей противника, состоящей из корабля ядра и двух кораблей охранения, планируется нанесений нескольких последовательных ударов ударными группами, применяющими различное оружие.
Различные виды оружия обладают разной вероятностью поражения корабля ядра и кораблей охранения, причем эта вероятность меняется в зависимости от числа боеспособных кораблей охранения.
Цель удара: поражение корабля ядра, цель моделирования: обоснование рациональной последовательности ударов.
В данном случае имеем:
а) Система – группа кораблей противника в составе корабля ядра и двух кораблей охранения.
б) Состояния системы:
А1 – корабль ядра и корабли охранения не поражены;
А2 – корабль ядра не поражен, один корабль охранения поражен,
А3 – корабль ядра не поражен, оба корабля охранения поражены;
А4 – корабль ядра поражен;
в) Шаг процесса: нанесение удара очередной ударной группой; момент шага: момент нанесения удара.
г) Система за один шаг способна переходить из состояния с меньшим номером в одно из состояний с большим номером. Обратные переходы невозможны. Однако система способна в результате шага оставаться в прежнем состоянии. Данную задачу иллюстрирует граф переходов (рис. 3.4.1).
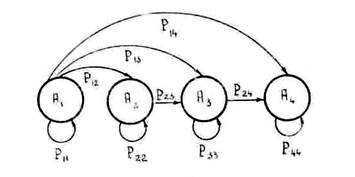
Рис. 3.4.1. Графическое представление модели задачи
Пример 2. В отличие от условий примера 1 целью ударов является поражение всех кораблей противника. В этом случае учитываемыми в модели состояниями системы являются:
А1, А2, А3 – корабль ядра не поражен, поражены соответственно ноль, один, два корабля охранения;
А4, А5, А6 – корабль ядра поражен, поражены соответственно ноль, один, два корабля охранения.
Пример 3. Если в условиях примера 1 считать, что вероятность поражения корабля ядра при очередном ударе существенно зависит от такого элемента «предыстории процесса», как повреждения, полученные этим кораблем при предыдущих ударах, то необходимо ввести состояния системы, связанные с повреждением корабля ядра. Эти повреждения, например, могут требовать снижения скорости группы кораблей противника ниже определенного предела. В этом случае в модели требуется учесть следующие состояния системы:
А1, А2, А3 – корабль ядра не поврежден, поражены соответственно ноль, один, два корабля охранения;
А4, А5, А6 – корабль ядра поврежден, поражены соответственно ноль, один, два корабля охранения;
А7 — корабль ядра поражен.
В примере 1 по сравнению с примером 2 состояния А4, А5, А6 объединены в одно состояние А4. Различие в числе учитываемых состояний определяется различием в целях действия сил.
В примере 3 для сохранения «марковости» процесса введена группа состояний, учитывающих повреждение корабля ядра.
Пример 4. Подводная лодка передает сообщения на командный пункт (КП), осуществляя для повышения надежности передачи сообщения несколько повторных передач радиограммы (РДО) с одним и тем же сообщением.
В процессе передачи сообщения подводная лодка может быть обнаружена и атакована противолодочными силами противника. В этом случае выполнить запланированное число передач РДО подводная лодка может, только оторвавшись от преследования.
Цель использования средств связи подводной лодки – передача на КП сообщения. Цель моделирования – обоснование лучшего по надежности способа передачи подводной лодкой сообщения в условиях противодействия противолодочных сил противника.
В данном случае имеем:
а) Система – подводная лодка и КП.
б) Состояния системы:
А1 – сообщение на КП не получено; подводная лодка противолодочными силами не поражена;
А2 – сообщение на КП получено;
А3 – сообщение на КП не получено; подводная лодка поражена противолодочными силами.
в) Шаг системы: передача подводной лодкой РДО. Шаг системы имеет продолжительность, равную математическому ожиданию промежутка времени между началами двух смежных передач РДО. При этом математическое ожидание времени уклонения подводной лодки от преследования включается в продолжительность шага.
г) Система способна из состояния А1 переходить в состояние А2 или А3. Из состояний А2 и А3 переход ни в какие другие состояния невозможен, так как при этом моделируемый процесс заканчивается: в первом случае ввиду достижения цели действий, во втором – из-за поражения подводной лодки. Возможно, что в результате шага система останется в прежнем состоянии.
Пример 5. Дополнительно к условиям примера 4 следует учесть, что возможность осуществления дальнейших передач РДО непораженной подводной лодкой существенно зависит от того, как подводная лодка пришла в состояние А1. А именно: если подводная лодка хотя бы один раз была обнаружена ранее, то противник усиливает противолодочную оборону в данном районе, отчего вероятность обнаружения подводной лодки возрастает.
В этом случае следует считать:
а) Система — подводная лодка, КП, противолодочные силы противника.
б) Состояния системы:
А1 – сообщение на КП не получено, подводная лодка не поражена, ранее противником не обнаруживалась; противолодочная оборона в районе не усилена;
А2 – сообщение на КП не получено, подводная лодка не поражена, противником ранее обнаруживалась; противник усилил противолодочную оборону в районе;
А3 – сообщение на КП получено;
А4 – сообщение на КП не получено, подводная лодка поражена противником.
в) Шаг системы: передача подводной лодкой РДО.
г) Система способна переходить из состояния А1 или А2 во все состояния с большим номером. Из состояний А3 и А4 переход ни в какие другие состояния невозможен. Данную задачу иллюстрирует граф переходов (рис. 3.4.2), в котором дополнительно к условиям задачи принято, что при состоянии системы А2 противник принимает лишь меры, затрудняющие подводной лодке использовать средства радиосвязи).
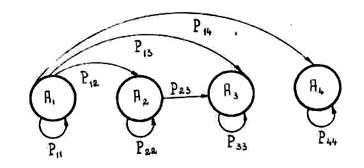
Рис. 3.4.2. Графическое представление модели задачи
Последний пример иллюстрирует следующее правило определения элементов обстановки, которые должны включаться в понятие система:
систему составляют все те элементы обстановки, которые способны изменяться от шага к шагу, изменяя при этом возможность достижения цели действия сил. Элементы обстановки, которые не способны изменяться в результате шага, но влияют на достижение цели действий (например, противолодочные силы противника в примере 4), учитываются при определении вероятностей переходов.
Заметим, что в приведенных выше примерах не рассматривались способы определения необходимых вероятностей: поражения объектов противника, обнаружения подводной лодки и т. д. Мы будем считать все необходимые вероятности событий известными.
Оперативно-тактическую постановку задачи осуществляет командир, а интерпретацию процесса как дискретной цепи Маркова должен осуществлять специалист по исследованию операций.
Вряд ли такой специалист будет находиться на корабле, поэтому и интерпретация процесса как дискретной цепи Маркова, и решение задачи должно быть возложено на БИУС. Для этого в БИУС:
- должна иметься достоверная и полная оперативная информация о противнике, а также своих силах и средствах,
- в базах данных БИУС должны храниться априорные вероятности наступления различных событий либо рассчитанные, либо полученные в результате накопления и обработки статистических данных,
- БИУС должна быть интеллектуальной системой, способной «понимать» поставленную командиром задачу и преобразовывать ее в форму, удобную для решения методами теории дискретных цепей Маркова.
Показатели эффективности, вычисляемые методами теории
дискретных цепей Маркова
Рассматриваемые методы позволяют находить распределение состояний системы на различных шагах процесса. А это открывает возможность с помощью методов теории вероятностей находить различные вероятностные характеристики, используемые в качестве показателей эффективности.
Обычно рассматриваемые методы применяются для определения следующих вероятностных характеристик:
– вероятности того, что цель действия сил (своих или противника) будет достигнута за заданное число шагов или за заданное время процесса;
– вероятности того, что цель действия сил будет достигнута именно на заданном шаге или именно в заданный момент;
– математического ожидания числа шагов, необходимых для достижения цели действий;
– математического ожидания времени, необходимого для достижения цели действий;
– математического ожидания ущерба, причиняемого противнику, или ущерба, причиняемого противником нашим силам за заданное число шагов процесса.
И несколько шагов
Основу математической модели цепи Маркова составляют матрицы вероятностей переходов системы в возможные состояния за каждый из шагов. В дальнейшем для краткости будем называть их просто матрицами переходов.
Рассмотрим свойства матрицы перехода за один шаг. Обозначим через  вероятности того, что система, которая перед очередным (k-м) шагом была в состоянии Аi, в результате k -го шага перейдет в состояние Аj (i = 1, 2, ... , m; j = 1, 2, ... , m).
вероятности того, что система, которая перед очередным (k-м) шагом была в состоянии Аi, в результате k -го шага перейдет в состояние Аj (i = 1, 2, ... , m; j = 1, 2, ... , m).
 Если вероятности переходов меняются от шага к шагу, цепь Маркова называется неоднородной.
Если вероятности переходов меняются от шага к шагу, цепь Маркова называется неоднородной.
Если же вероятности одинаковы для всех шагов, цепь Маркова называется однородной. В этом случае вероятности перехода принято обозначать  .
.
Матрица вероятностей переходов за один шаг имеет следующий вид:
Как видно, матрица вероятностей переходов квадратная, т. е. число строк равняется числу столбцов. Каждый элемент i-й строки матрицы (i = 1, 2, . . . , т) есть вероятность того, что система, которая до k-го шага была в состоянии Ai, после k-го шага перейдет в состояние, номер которого соответствует номеру столбца матрицы.
Например:
 – вероятность того, в результате k-го шага система перейдет из состояния Ai в состояние A1;
– вероятность того, в результате k-го шага система перейдет из состояния Ai в состояние A1;
 – вероятность того, в результате k-го шага система перейдет из состояния Ai в состояние A2;
– вероятность того, в результате k-го шага система перейдет из состояния Ai в состояние A2;
 – вероятность того, в результате k-го шага система перейдет из состояния Ai в состояние Ai (т. е. вероятность того, что система останется в состоянии Ai);
– вероятность того, в результате k-го шага система перейдет из состояния Ai в состояние Ai (т. е. вероятность того, что система останется в состоянии Ai);
 – вероятность того, в результате k-го шага система перейдет из состояния Ai в состояние Am;
– вероятность того, в результате k-го шага система перейдет из состояния Ai в состояние Am;
Так как система в результате k-го шага обязательно должна оказаться в одном из т состояний, то сумма вероятностей каждой из строк равняется единице:
Это свойство часто используется для проверки правильности заполнения матрицы переходов.
Элементы j-го столбца матрицы переходов (j = 1, 2, ... , т) представляют собой условные вероятности перехода системы в результате k-го шага в состояния Аj, вычисленные при условии, что перед k-м шагом система находилась в состоянии Ai.
В зависимости от особенностей процесса некоторые из вероятностей могут быть равны нулю, что означает невозможность перехода системы на k-м шаге из состояния Ai в состояние Аj.
Знание матрицы перехода за один шаг позволяет определить элементы р ij(п) матрицы переходов за п шагов.
· Через р ij(п) обозначается вероятность того, что система, бывшая перед первым шагом в состоянии Ai, в результате п шагов (т. е. после п шагов) процесса перейдет в состояние Аj.
Матрица переходов за п шагов определяется в результате последовательного матричного перемножения п матриц.
Обозначим через pk или  матрицу переходов для k-го шага, а через p(п) или
матрицу переходов для k-го шага, а через p(п) или  – матрицу переходов в результате п шагов.
– матрицу переходов в результате п шагов.
Символически матричное произведение для неоднородной цепи записывается следующим образом:
p(п)= p1×p2×…×pk×…×pn
или
 =
=  ×
×  ×…× ×…×
×…× ×…×  (1)
(1)
а для однородной цепи:
p(п)= p1n
или
=  (2)
(2)
Смысл же матричного перемножения матриц переходов рассмотрим на следующем примере.
Пример 6. Пусть заданы матрицы перехода на первом и втором шагах:

Требуется определить матрицу .перехода за два шага
Определим, в качестве примера вероятность р23(2) перехода системы за два шага из второго состояния в третье.
Относительно исходов первого шага системы мы можем только строить гипотезы. А именно, известно, что после первого шага система может из состояния А2 перейти в состояние A1 или в состояние А3, или остаться в состоянии А2. Известны и вероятности этих гипотез. Ими являются соответственно вероятности  ,
,  ,
,  .
.
Если реализуется гипотеза A1, то искомое событие (переход системы в состояние А3) произойдет с условной вероятностью  , при гипотезе А2 – с условной вероятностью
, при гипотезе А2 – с условной вероятностью  и т. д.
и т. д.
Таким образом, можно использовать формулу полной вероятности
Обратим внимание, что процесс нахождения вероятности  выглядит следующим образом: элементы второй строки матрицы p1 почленно умножаются на элементы третьего столбца матрицы p2, затем суммируются найденные произведения.
выглядит следующим образом: элементы второй строки матрицы p1 почленно умножаются на элементы третьего столбца матрицы p2, затем суммируются найденные произведения.
Аналогичным образом определяются и остальные вероятности матрицы перехода p (2).
В общем виде формула для определения вероятностей переходов системы за два шага имеет вид
|
|

где pis(п – 1) – вероятность перехода системы из состояния Ai в состояние As в результате шагов от первого до (п – 1)-го, или
|
|

где psj (п – 1) – вероятность перехода системы из состояния As в состояние Aj в результате шагов от второго до п-го.
Соответственно двум предыдущим выражениям для матрицы p(п) переходов за п шагов справедливы выражения
 (5)
(5)
 (6)
(6)
Матрица переходов за п шагов обладает теми же свойствами, что и матрица переходов за один шаг.
Для перемножения матриц переходов на ЭВМ могут быть легко разработаны стандартные процедуры.
Произведение матриц переходов не обладает переместительным свойством. В общем случае p1 p2 ¹ p2 p1. Это обстоятельство позволяет использовать цепи Маркова для обоснования важного элемента решений командира по поставленным задачам – определения оптимальной последовательности ударов или, шире, оптимальной последовательности действий.
Классификация случайных процессов
В большом числе случаев боевые действия сил флота, применение оружия и использование технических средств выступают перед исследователем как случайные процессы, протекающие во времени. Случайными называются такие процессы, которые при их повторении приводят к различным результатам, причем заранее не известно, к каким именно. Случайные процессы изменения соотношения сил сторон получили название динамики боя [3].
Для количественного, обоснования решений при управлении такими процессами необходимо разрабатывать их математические модели. При разработке математических моделей случайных процессов в рассмотрение вводится понятие системы, которая в силу ряда случайных факторов может переходить в различные состояния.
Случайные процессы подразделяются:
· по количеству состояний на процессы со счетным множеством состояний и с несчетным множеством состояний. Примерами случайных процессов с несчетным множеством состояний являются процессы изменения подводной лодкой глубины погружения, когда состояние системы – подводной лодки – определяется глубиной погружения; процессы движения по заданной траектории крылатой ракеты, местоположение которой (состояние системы) определяется координатами в трехмерном пространстве. К числу процессов со счетным множеством состояний относятся, например, процессы поиска объектов, когда состояния системы отличаются числом обнаруженных объектов; процессы боевых действий, когда состояния системы определяются числом боеспособных (или пораженных) объектов.
· по времени смены состояний на процессы с дискретным и непрерывным временем переходов системы из состояния в состояние. Если по соединению кораблей наносится ряд последовательных ударов, то число боеспособных кораблей в составе этого соединения может меняться лишь в моменты нанесения ударов. Это пример случайного процесса с дискретным временем переходов. При поиске разведчиками объектов в некотором районе состояние системы – число обнаруженных объектов – может измениться в любой момент времени. Этот процесс является процессом с непрерывным временем переходов.
· по зависимости вероятностей переходов в состояния от текущего времени на стационарные и нестационарные процессы. У стационарных процессов вероятностные характеристики не меняются с течением времени, а у нестационарных являются функцией времени, прошедшего с начала процесса.
· по зависимости состояния от других состояний на Марковские и не Марковские случайные процессы. Процесс является Марковским, если будущее состояние системы определяется ее настоящим состоянием и не зависит от того, как именно система пришла в это состояние.
Применение дискретных цепей Маркова
для математического моделирования процессов боевых действий
При обосновании решений командиров по поставленным задачам часто возникает необходимость в математических моделях случайных процессов со счетным множеством состояний и дискретным или непрерывным временем переходов.
Для моделирования случайных процессов со счетным множеством состояний и с дискретным временем переходов наиболее приемлем аппарат теории дискретных цепей Маркова.
Методы математического моделирования многих случайных процессов со счетным множеством состояний и непрерывным временем переходов (стационарных и нестационарных, Марковских и не Марковских) рассматриваются в теории массового обслуживания.
Кроме того, существует целый ряд специфических процессов динамики действия сил, таких как процессы поиска и слежения, процессы использования носителей оружия (являющихся также случайными процессами со счетным числом состояний, дискретным или непрерывным временем переходов). Для моделирования этих процессов разработаны специальные методы. Очень часто при их разработке используются аппарат или идеи теории дискретных цепей Маркова, теории массового обслуживания, их комбинаций.
Своим названием дискретные цепи Маркова обязаны выдающемуся русскому математику А. А. Маркову, разработавшему основы их теории. Первые его работы в этой области относятся к 1907 г.
Внедрение в практику управления силами электронно-вычислительной техники открыло широкие возможности применения методов теории дискретных цепей Маркова для обоснования решений командиров по поставленным задачам.
Область возможного применения рассматриваемых методов чрезвычайно широка. В большом числе случаев эти методы являются, чуть ли не единственным, эффективным инструментом объективного обоснования решений, когда осуществляется управление некоторой системой, способной изменять свои состояния во времени [3]. Термин система здесь употреблен в широком смысле. Такими системами могут быть технические средства, оружие, корабли, соединения кораблей.
Вот некоторые примеры оперативно-тактических ситуаций, когда для эффективного управления необходимо математическое моделирование с использованием методов теории дискретных цепей Маркова.
1. Артиллерийские и ракетные дуэли кораблей и групп кораблей. Целью моделирования при этом может быть:
– обоснование лучших способов маневрирования при выходе в позицию применения оружия и в процессе применения оружия,
– лучших способов ведения огня,
– прогнозирование возможных тактических приемов противника.
2. Применение по противнику оружия несколькими ударными группами. Возможная цель моделирования:
– обоснование рациональных способов взаимодействия групп,
– определение оптимальной последовательности ударов,
– прогнозирование организации противником обороны своих объектов.
3. Организация связи с управляемыми силами, связи взаимодействия между силами. Цель моделирования:
– обоснование рациональной организации связи,
– рациональных способов использования средств связи,
– прогнозирование мероприятий противника по срыву связи.
4. Ведение разведки корабельных соединений и конвоев противника с целью наведения на них ударных сил. Цель моделирования:
– обоснование рациональных способов ведения разведки,
– способов использования разведчиками средств связи,
– прогнозирование способов противодействия противника ведению разведки и наведению ударных сил.
При моделировании процессов боевых действий методы теории цепей Маркова могут применяться как самостоятельно, так и использоваться для разработки блоков моделей.
Прежде чем применять рассматриваемые методы необходимо научиться распознавать в изучаемом процессе черты, присущие дискретным цепям Маркова, и ставить (формулировать) задачу для разработки модели.
Дата: 2019-03-05, просмотров: 348.