Рассмотрим два примера бифуркации. Вначале ДС находится в устойчивом стационарном состоянии (рис. 19.1 а). Затем параметры ДС меняются (рис. 19.1 б) и в конце появляется неустойчивое состояние (помечено светлым кружком) и два устойчивых состояния вблизи неустойчивого (рис. 19.1 в). Такая бифуркация называется мягкой.
Во втором примере вначале для ДС имеется как устойчивое состояние, так и неустойчивое (помеченное светлым кружком на рис. 19.2 а). Затем параметры ДС начинают меняться (рис. 19.1 б) и наступает момент, когда появляется точка бифуркации – устойчивое и неустойчивое состояния сливаются. Наконец, точка бифуркации исчезает и появляется новое стационарное состояние, существенно отличающееся от первоначального и не находящееся вблизи него. Такая бифуркация называется жёсткой, а попадание ДС в новое стационарное состояние называют катастрофой.
Катастрофа – внезапный скачок изменения состояния.
Устойчивость – способность ДС восстанавливать исходное или близкое к нему состояние равновесия после того, как прекратили отклонять параметры ДС от номинальных значений.
Качественный анализ ДС
Пусть состояние ДС задаётся единственной величиной (координатой)  зависящей от времени, а эволюция – уравнением
зависящей от времени, а эволюция – уравнением

или

Вы знаете, что при  величина
величина  растёт с течением времени, а при
растёт с течением времени, а при  убывает. Значит, если
убывает. Значит, если  то
то  с течением времени возрастает, если
с течением времени возрастает, если  то
то  убывает, а если
убывает, а если  то величина не уменьшается и не растёт, т.е. постоянна,
то величина не уменьшается и не растёт, т.е. постоянна, 
Состояние  где
где  – корень уравнения
– корень уравнения  называется состоянием (или точкой) равновесия.
называется состоянием (или точкой) равновесия.
На рис. 8.1 показан случай, когда уравнение  имеет три корня
имеет три корня  – три состояния равновесия. Стрелки на оси
– три состояния равновесия. Стрелки на оси  показывают интервалы, места, где растёт и где убывает. Здесь мы видим, что состояния
показывают интервалы, места, где растёт и где убывает. Здесь мы видим, что состояния  устойчивы, а
устойчивы, а  неустойчиво.
неустойчиво.
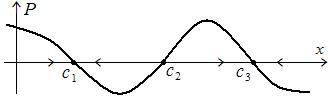
Рис. 8.1
Таким образом, даже не решая исходное дифференциальное уравнение можно исследовать поведение ДС. Характер поведения ДС показан на оси  поэтому график функции P обычно не рисуют и оставляют лишь то, что происходит на оси
поэтому график функции P обычно не рисуют и оставляют лишь то, что происходит на оси  (рис. 8.2):
(рис. 8.2):

Рис. 8.2
Такое изображение поведения ДС называется фазовым портретом ДС, а ось – фазовой прямой.
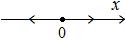
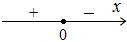
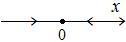
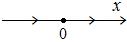
Для ДС с единственным состоянием равновесия  фазовый портрет бывает одним из следующих четырёх типов (рис. 8.3):
фазовый портрет бывает одним из следующих четырёх типов (рис. 8.3):
а б в г



Рис. 8.3
Состояние  в случаях (а), (г) называется шунтом, в случае (б) аттрактором (притягивателем), в случае (в) репеллером (отталкивателем).
в случаях (а), (г) называется шунтом, в случае (б) аттрактором (притягивателем), в случае (в) репеллером (отталкивателем).
З а д а ч а 1. Найти состояние равновесия и исследовать поведение ДС, описываемой уравнением

Приравняем правую часть нулю:  Отсюда
Отсюда  – состояние равновесия. Если
– состояние равновесия. Если  то правая часть
то правая часть  на оси состояния
на оси состояния  имеет следующие знаки:
имеет следующие знаки:
Поэтому фазовый портрет, на котором изображается поведение ДС, таков:
Видим, что состояние равновесия неустойчиво (репеллер): при малейшем отклонении от точки  в ту или другую сторону система стремится удалиться от этого состояния.
в ту или другую сторону система стремится удалиться от этого состояния.
Если же  то знаки на оси поменяются:
то знаки на оси поменяются:
На фазовом портрете направление стрелок станет таким:
Здесь состояние равновесия устойчиво (аттрактор): при малейшем отклонении от точки  в ту или другую сторону система стремится вернуться в это состояние. ■
в ту или другую сторону система стремится вернуться в это состояние. ■
З а д а ч а 2. Найти состояния равновесия и исследовать поведение ДС, описываемой уравнением

Приравняем правую часть нулю,  Отсюда
Отсюда  Если
Если  то уравнение не имеет вещественного решения, т.е. у ДС нет устойчивого состояния. Если
то уравнение не имеет вещественного решения, т.е. у ДС нет устойчивого состояния. Если  то уравнение имеет единственное решение
то уравнение имеет единственное решение  и фазовый портрет
и фазовый портрет
Состояние равновесия является шунтом. Наконец, если то уравнение имеет два решения  и фазовый портрет
и фазовый портрет
Из него видим, что состояние равновесия  является аттрактором (т.е. устойчивым), состояние
является аттрактором (т.е. устойчивым), состояние  репеллером (неустойчивым). ■
репеллером (неустойчивым). ■
Пусть состояние ДС задаётся двумя величинами (координатами) 
 зависящими времени, а эволюция ДС – системой уравнений
зависящими времени, а эволюция ДС – системой уравнений
Поведение ДС теперь изображается на плоскости состояний 
 – фазовой плоскости. Как и в предыдущем случае, состояния (точки) равновесия ДС определяются из условий
– фазовой плоскости. Как и в предыдущем случае, состояния (точки) равновесия ДС определяются из условий
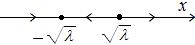
Рассмотрим систему

в которой 
 – полярные координаты, связанные с декартовыми по формулам
– полярные координаты, связанные с декартовыми по формулам 
 Смысл полярных координат:
Смысл полярных координат:  – расстояние от начала координат,
– расстояние от начала координат,  а
а  – угол, отсчитываемый от положительного направления оси
– угол, отсчитываемый от положительного направления оси  Поэтому
Поэтому  – угловая скорость. В рассматриваемой ДС точкой равновесия является
– угловая скорость. В рассматриваемой ДС точкой равновесия является  – начало координат О. Если
– начало координат О. Если  то
то  – закручивающиеся вокруг О спирали, поэтому О называют устойчивым фокусом. Если
– закручивающиеся вокруг О спирали, поэтому О называют устойчивым фокусом. Если  то
то  отсюда
отсюда  – окружности различных радиусов
– окружности различных радиусов  Если
Если  то
то  и поэтому О является неустойчивым фокусом. Следовательно, ДС испытывает бифуркацию при
и поэтому О является неустойчивым фокусом. Следовательно, ДС испытывает бифуркацию при  Фазовые линии при
Фазовые линии при  для случаев
для случаев 
 показаны на рис. 8.4.
показаны на рис. 8.4.
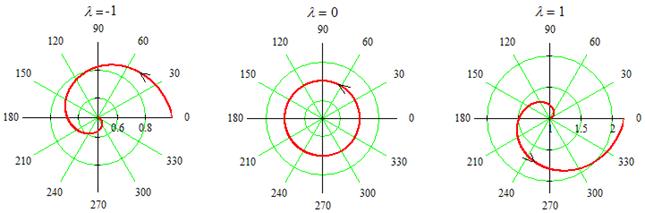
Рис. 8.4
Рассмотрим систему
Приравняв правую часть первого уравнения к нулю,  найдём два равновесных состояния
найдём два равновесных состояния 

Практические задания по дисциплине
«Общая теория динамических систем»
Раздел 1. Дополнительные сведения об обыкновенных дифференциальных уравнениях. (ОК-1, ПК-5)
Практическое занятие 1. Системы обыкновенных дифференциальных уравнений. Основные свойства. Фазовые траектории.
1. Найти общее решение системы уравнений. Исследовать особые точки систем. Исследовать устойчивость нулевого решения по критерию Ляпунова.
x'(t) = 2x + y
y'(t) = 4x-y
2. Найти положения равновесия, определить их характер и нарисовать фазовые траектории линеаризованных систем в окрестности положения равновесия для автономной системы уравнений
х'(t) = y2-y-2
у '(t)=-ху-3у-2
Практическое занятие 2. Линейные системы дифференциальных уравнений. Различные способы решения. Операторный способ решения систем с постоянными коэффициентами.
1. Найти решение уравнения операционным методом, удовлетворяющее начальным условиям.
x'' + 4х' + 3x = e-3t cost
х(0) = 1, х'(0) = 0
2. Найти решение уравнения, удовлетворяющее начальным условиям
x(0) = 1, х'(0) = 1 х''-4х' + 3х = t2.
Раздел 2. Элементы качественной теории дифференциальных уравнений (ПК-2, ПК-5)
Практическое занятие 1. Устойчивость системы. Линеаризация уравнений. Устойчивость по Ляпунову.
1. Найти общее решение систем уравнений. Исследовать особые точки систем. Исследовать устойчивость нулевого решения по критерию Ляпунова.
x'(t) = -x+8y
у'(t) = х+у
2. Найти положения равновесия, определить их характер и нарисовать фазовые траекторий линеаризованных систем в окрестности положения равновесия для автономных систем
x'(t) = x2+x+2y2 - 2
y'(t)=x + y2
Практическое занятие 2. Особые точки систем. Классификация особых точек
7. Найти общее решение систем уравнений. Исследовать особые точки систем. Исследовать устойчивость нулевого решения по критерию Ляпунова.
x'(t) = x-y
y'(t) = y-4x
8. Найти положения равновесия, определить их характер и нарисовать фазовые траектории линеаризованных систем в окрестности положения равновесия для автономных систем
x'(t) = y2-y-2
y'(t) = -xy-3y-2
Практическое занятие 3. Поведение фазовых траекторий в окрестностях грубых положений равновесия
9. Опишите бифуркацию в динамической системе, описываемой системой уравнений
x'1=-x21+ε, x'2=-x2.
10. Найти общее решение систем уравнений. Исследовать особые точки систем. Исследовать устойчивость нулевого решения по критерию Ляпунова.
x'(t) =2x+y
y'(t) =3х+4у
Практическое занятие 4. Дифференциальные уравнения зависящие от параметра. Фазовые портреты узлов, седла и фокуса
11. Найти положения равновесия, определить их характер и нарисовать фазовые траектории линеаризованных систем в окрестности положения равновесия для автономных систем
x'(t) =1-2x-y2
y'(t) =e-4x-1
12. Исследовать устойчивость неподвижных точек одномерного отображения при различных значениях параметров системы. Действие отображения изобразить с помощью диаграммы Ламерея. Найдите бифуркационное значения параметра и изобразите диаграммы.
хn+1=λ.хn-хn3
Практическое занятие 5. Предельные циклы. Полуустойчивый цикл. Бифуркации рождения циклов, Гомоклинические траектории. Седло-узел. Бифуркация рождения предельного цикла, когда исчезает гомоклиническая траектория.
13. Найти решение уравнения, удовлетворяющее начальным условиям
х(0) = 1, х'(0) = l, x''+x = tsint
14. Найти общее решение систем уравнений. Исследовать особые точки систем. Исследовать устойчивость нулевого решения по критерию Ляпунова.
х'(t) = x-5y
у'(t) = 2x-y
Практическое занятие 6. Рождение устойчивого предельного цикла, когда существует гомоклиническая траектория, выходящая из седла.
1. Найти положения равновесия, определить их характер и нарисовать фазовые траектории линеаризованных систем в окрестности положения равновесия для автономных систем
х(t) = x-2y-y2
2. Найти общее решение системы уравнений. Исследовать особые точки систем. Исследовать устойчивость нулевого решения по критерию Ляпунова.
x'(t) = x + 2y
y'(t) = 4x+3y
Практическое занятие 7. Одномерные отображения. Диаграмма Ламерея. Отображения сдвига. Отображения сжатия. Отображение сжатия плюс сдвиг.
Исследовать устойчивость неподвижных точек одномерного отображения при различных значениях параметров системы. Действие отображения изобразить с помощью диаграммы Ламерея. Найдите бифуркационное значения параметра и изобразите диаграммы.
хn+1=λ.хn-хn3
Опишите бифуркацию в динамической системе, описываемой уравнением х' = -х2 + ε
Раздел 3. Теория линейных динамических систем (ОК-1, ОК-2, ПК-2, ПК-4)
Практическое занятие 1. Линейные управляемые динамические системы в дискретной и непрерывной форме. Фазовые траектории управляемых систем.
Найти решение уравнения, удовлетворяющее начальным условиям
х(0) = 1, х(0) = 1 x''-4x' + 5x = e4t
2. Найти общее решение системы уравнений. Исследовать особые точки систем. Исследовать устойчивость нулевого решения по критерию Ляпунова.
x'(t) = 2x + y
y'(t)=4x-y
Практическое занятие 2. Пространства состояний, входов и выходов динамической системы. Операторы переходов, входов и выходов динамических систем. Представление в явной форме или в виде уравнений. Примеры.
Найти положения равновесия, определить их характер и нарисовать фазовые траектории линеаризованных систем в окрестности положения равновесия для автономной системы.
х'(t) = у2-у-2
y'(t) = -xy-3y-2
2. Найти решение уравнения операционным методом удовлетворяющее начальным условиям.
х+4х + 3х = е-3t cost
х(0) = 1, х'(0) = 0
Практическое занятие 3. Математические модели процессов и систем.
Найти общее решение системы уравнений. Исследовать особые точки систем. Исследовать устойчивость нулевого решения по критерию Ляпунова.
x'(t)=x-5y
y'(t)=2x-y
2. Опишите бифуркацию в динамической системе, описываемой в полярных координатах уравнением ρ'=(ε-ρ2+2ρ-1), φ=1.
Практическое занятие 4. Линейные стационарные системы. Условия наблюдаемости и управляемости.
Найти общее решение системы уравнений. Исследовать особые точки систем. Исследовать устойчивость нулевого решения по критерию Ляпунова.
х'(t) = x + 2y
y'(t) = 4x+3y
Найти решение уравнения, удовлетворяющее начальным условиям
х(0) = 1, х'(0) = l x''-4x' + 3x = t2
Список литературы
· Данко П.Е., Попов А.Г., Кожевникова Т.Я. Высшая математика в упражнениях и задачах М.: ОНИКС 21 век, 2002.
· Берман Г.Н. Сборник задач по курсу математического анализа. СПб: Профессия, 2003.
· Кремер Н.Ш. Практикум по высшей математике. М.: ЮНИТИ-ДАНА, 2003.
· Лунгу К.Н., Норин В.П., Письменный Д.Т., Шевченко Ю.А. Сборник задач по высшей математике. 2 курс. М.: Айрис-пресс, 2004.
· Минорский В.П. Сборник задач по высшей математике.(Учебное пособие для студентов ВТУЗов).М.,»Наука»,1987г.
· Кудрявцев В.А. , Демидович Б.П. Краткий курс высшей математики (Учебное пособие для вузов). М., «Астрель.АСТ» 2007.
· Щипачев В.С. Основы высшей математики. (Учебное пособие для втузов). М., «Высшая школа»,1994.
Дата: 2019-02-25, просмотров: 365.