Механическими системами управления всеми его механизмами оснащены краны С818.
В механических системах управления усилием руки приводится в действие механи-
ческая дистанционная передача, состоящая из рычагов, тяг, различных компенсаторов от поста управления к исполнительным элементам системы. Такими элементами являются золотниковый распределитель управления и золотниковый распределитель сервопривода насоса регулируемой подачи.
Механические системы управления обеспечивают не только действие золотнико-
вых распределителей, но и последовательность их срабатывания, если в системе предусмо
трены блокировки и средства защиты.
Одна из разновидностей механической системы представлена на рис. 13.30 систе-
мой управления механизмами изменения вылета стрелы и поворота крана.
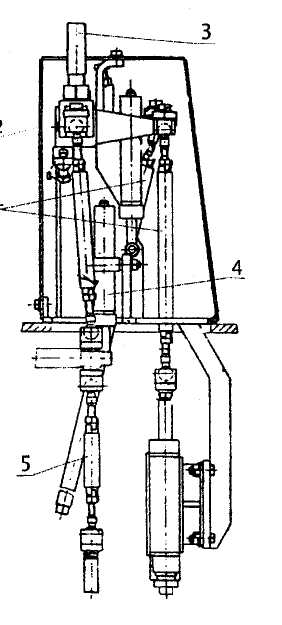
Рис. 13.30. Механическая система управления механизмами изменения вылета стрелы и поворота крана С818:
1 – тяги золотников распределителей и сервопривода; 2 – пост управления системы
3 – рукоятка поста управления в крышке поста; 4 – пружинные нуль-установители; 5 – тяги распределителя
Пост управления 2 этой системы расположен в кабине крана слева от крановщика
Рукоятка 3 поста управления находится под действием пружинных нуль-установи
телей 4 и располагается в центре крестообразного паза в крышке поста.
Для поворота крана рукоятка переводится из среднего положения влево либо впра-
во по поперечному пазу, поворачивает рычаг и перемещает тягами 1 золотники распреде-
лителя и сервопривода в заданное рабочее положение,
Гидропривод поворота крана выполняет заданный поворот по направлению и вели
чине к моменту возвращения рукоятки в среднее положение.
В такой системе управления крановщик с помощью рукоятки преодолевает сопро-
тивления нуль-установителя, рычажной системы и распределителей.
Для изменения вылета стрелы крановщик перемещает рукоятку по продольному пазу и тягами 5 воздействует на распределитель.
Как видно из рисунка, длина любой тяги может изменяться с помощью талрепа, а шаровые окончания винтов талрепов позволяют рукояткой независимо воздействовать на любой механизм.
Во время регулировки системы в начале в среднее положение устанавливаются все исполнительные элементы и только после этой операции производится соединение их тя-
гами.
Завершается сборка системы надежным шплинтованием всех соединений.
Чувствительность системы управления зависит от ее люфта. В эксплуатации он должен поддерживаться на минимуме.
В эксплуатационных условиях в механических системах управления появляются слабины, деформации рычагов и тяг, ослабления либо разрушения пружин компенсаторов, ослабления крепежных деталей опор и, наконец, люфты во всех шарнирных соединениях.
Все это приводит к разрегулированию системы, увеличению зоны нечувствитель
ности системы и, в конечном итоге, к изменению выходных параметров механизмов крана и, следовательно, к уменьшению производительности крана.
В механической системе управления ограничение вылета стрелы, исключение появ
ления слабины грузового либо топенантного тросов, ограничение длины сматываемого с барабана грузового троса и ограничение поворота крана осуществляются с помощью ку-
лачковых механизмов.
Эти механизмы используются для привода в действии двухпозиционных золотниковых распределителей с пружинным возвратом в исходную позицию. При срабатывании распределителей в гидроприводах осуществляются переключения, обеспечивающие соот-
ветствующую защиту.
Механик, осуществляющий эксплуатацию крана с такой системой управления, дол
жен четко представлять какое влияние может оказывать механическая система управления на выходные параметры гидроприводов крана, на безотказность работы гидроприводов; какие могут появляться в системе неисправности и отказы; как они будут проявляться; каковы причины их возникновения и в какой последовательности вести их поиск.
Очевидно, что система управления при своих неисправностях и отказах приводит к изменению рабочих параметров крана и к его отказам.
Следовательно, поиск неисправностей и отказов крана должен начинаться с провер
ки работы системы управления и устранения в ней неисправностей и отказов.
Дата: 2019-02-02, просмотров: 448.