При выполнении грузовых операций судовым краном его нагрузочные характери
стики представляются работой трех механизмов: механизма подъема, механизма изме-
нения вылета стрелы и механизма поворота. Упрощенная нагрузочная диаграмма рабо
ты всех трех ЭП указанных механизмов при погрузке судна представлена на рис. 13.7.
После застропки груза включают ЭД механизма подъема, который работает с моментом М  на валу в течение времени t
на валу в течение времени t  , поднимая груз на необходимую высоту выше борта.
, поднимая груз на необходимую высоту выше борта.
В течение времени t  работает ЭД механизма изменения вылета стрелы, подни-
работает ЭД механизма изменения вылета стрелы, подни-
мая стрелу с грузом так, чтобы нок стрелы после ее поворота оказался над люком трю-
ма. По мере уменьшения вылета уменьшаются также плечи сил тяжести груза и стрелы, что объясняет уменьшение момента на валу ЭД от значения М  до значения М
до значения М  .
.
В период времени t  работает ЭД механизма поворота крана, который развивает момент М
работает ЭД механизма поворота крана, который развивает момент М  .
.
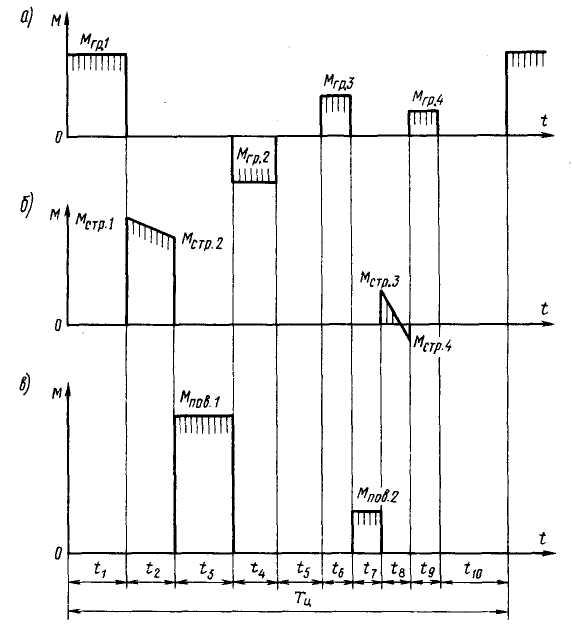
Рис. 13.7. Нагрузочная диаграмма электропривода грузового поворотного крана:
механизмов подъема ( а ), вылета стрелы ( б ) и поворота ( в )
В конце этого периода груз оказывается над люком трюма, куда и опускается в течение времени t  при работе ЭД механизма подъема в режиме рекуперативного тор-
при работе ЭД механизма подъема в режиме рекуперативного тор-
можения с моментом M  .
.
После расстропливания груза в трюме ( время t  ) холостой гак в течение времени t
) холостой гак в течение времени t  поднимается ЭД механизма подъема. Момент M
поднимается ЭД механизма подъема. Момент M  на валу ЭД создается силами трения в передаче.
на валу ЭД создается силами трения в передаче.
Далее следует поворот крана с выводом нока стрелы за борт (время t  , момент М
, момент М  ), опускание стрелы ( время t
), опускание стрелы ( время t  , уменьшение момента от М
, уменьшение момента от М  до М
до М  ) и спуск холостого гака (время t
) и спуск холостого гака (время t  , момент М
, момент М  ) за новой партией груза.
) за новой партией груза.
Застропливанием этого груза в течение времени t  заканчивается цикл работы ЭП крана.
заканчивается цикл работы ЭП крана.
Условия работы ГПМ
Современный электропривод судовых грузоподъемных механизмов как отечествен-
ный, так и зарубежный изготавливается с использованием специализированных электрических машин и аппаратов, отвечающих особым требованиям эксплуатации.
Специфические условия судовой эксплуатации электрооборудования
грузоподъемных механизмов в основном сводятся к следующим: высокая влажность воздуха вплоть до выпадения росы, высокая температура окружающей среды, качка судна, повышенная вибрация. Все оборудование грузоподъемных устройств, установленное на открытых палубах, должно быть рассчитано на обливание морской водой, а также на кратковременные погружения в волну, заливающую палубу, на возможность обледенения. К оборудованию предъявляются более высокие требования по прочности и коррозийной стойкости.
Главное различие электроприводов судовых грузоподъемных механизмов от берего-
вых заключается в их питании от электростанций соизмеримой мощности. Приходится искать комплексное решение задач по обеспечению стабилизации параметров тока и устойчивости работы электростанции с мощными электроприводами грузовых устройств, а также по выбору наиболее целесообразных электродвигатели и систем управления, позволяющих уменьшить пиковые нагрузки в условиях частой работы в динамических режимах.
Режимы работы ГПМ
Электроприводы ГПМ работают в повторно-кратковременном режиме, который в
соответствии с международной классификацией обозначается S3.
Этот режим характеризуется частыми пусками и остановками электродвигателя ГПМ.
В общем виде цикл работы грузовой лебедки состоит из следующих 8 операций:
1. подъем груза;
2. перенос груза в горизонтальной плоскости;
3. опускание груза;
4. расстройка груза;
5. подъем холостого гака;
6. обратное перемещение гака в горизонтальной плоскости;
7. опускание холостого гака;
8. застропка груза.
Грузовые операции могут осуществляться одной лебедкой, двумя лебедками или грузовым краном.
Для обоснованного выбора режима эксплуатации ЭП, а также для выбора ЭД по мощности необходимо прежде всего знать, как изменяется нагрузка на валу ЭД во вре-
мени. С этой целью используют нагрузочные диаграммы, представляющие собой зависимость момента на валу двигателя от времени, т.е. М ( t ).
Ниже рассматриваются нагрузочные диаграммы для таких режимов работы ГПМ:
1. работа одной лебедки;
2. работа двух лебедок на один гак;
3. работа грузового крана.
Требования Правил Регистра к электроприводам грузоподъемных механизмов
Дата: 2019-02-02, просмотров: 469.