В зависимости от назначения и расположения тягового органа различают такие виды якорно-швартовных устройств:
1. брашпили;
2. якорно-швартовные лебедки;
3. шпили;
4. швартовные лебедки.
Рабочий механизм якорно-швартовных устройств
В соответствии с Правилами Регистра, каждое судно должно иметь якорное устрой
ство, рабочий механизм которого состоит из 4-х узлов:
1. редуктора;
2. тормозных средств;
3. основного и вспомогательного грузовых барабанов;
4. муфт переключений;
В качестве редукторов применяются двух-трехступенчатые цилиндрические или червячные редукторы с передаточным отношением i = 180…250 при значении КПД = 0,75…0,85.
В качестве тормозных устройств применяют дисковые фрикционные тормоза, пристроенные непосредственно к электродвигателю, и ленточные тормоза, охватывающие тормозной шкив каждого основного ( якорного ) барабана.
Основной ( якорный ) барабан предназначен для перемещения якоря, вспомога-
тельный ( швартовный ) – для перемещения швартовных канатов.
Муфты переключения предназначены для обеспечения механической связи между
якорными барабанами и остальной частью электропривода ЯШУ.
Если муфта выключена ( находится в положении «Разобщено» ), то якорные бараба
ны и привод брашпиля разобщены, Поэтому при включении электродвигателя ЯШУ вра-
щаются только швартовные барабаны.
Во включенном состоянии муфты якорные барабаны механически сообщаются с приводом брашпиля, поэтому при включении электродвигателя швартовные и якорные барабаны вращаются одновременно.
В качестве муфт переключения используются кулачковые с ручным переключени-
ем ( см. ниже ).
Основной ( якорный ) барабан предназначен для перемещения якорей, вспомога-
тельный ( швартовный ) – для перемещения швартовных канатов.
4. Устройство ЯШУ
Брашпили
Брашпили имеют горизонтальное расположение рабочей оси и располагаются пол-
ностью на палубе полубака.
Брашпиль состоит из двигателя, редуктора и размешенных на грузовом валу цеп-
ных звездочек и швартовных турачек ( рис. 12.1 ). Звездочки сидят на валу свободно, могут соединяться с ним посредством специальных кулачковых муфт.
Турачки имеют жесткую связь с грузовым валом. Каждая звездочка имеет ленточ-
ный тормоз с винтовым приводом.
Брашпиль обеспечивает раздельную работу звездочек левого и правого борта. Отдача якоря производится под действием его собственной массы. Скорость регу
лируется ленточным тормозом.
Современные брашпили имеют гидравлические устройства дистанционного управ
ления ленточным стопором, что позволяет отдавать якорь непосредственно из рулевой рубки. При этом сохраняется контроль за длиной вытравленной цепи.
Выбирание якоря производится электроприводом с местного поста управления. Возможен одновременный подъем двух якорей с половинной глубины залегания якорей
( для судов водоизмещением до 10 000 т эта половинная глубина равна 100 м ).
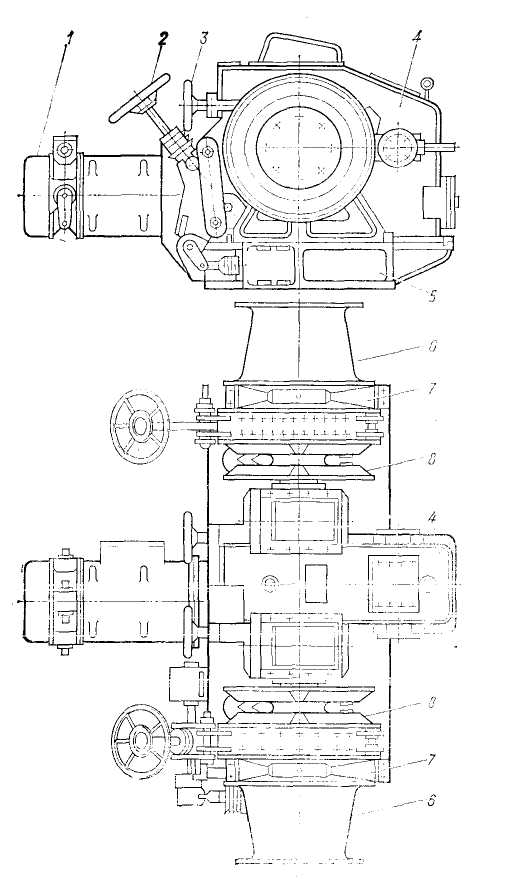
Рис. 12.1. Общий вид якорно-швартовного брашпиля:
1 - электродвигатель; 2 - привод тормоза звездочки; 3 - привод кулачковой муфты; 4 - редуктор; 5 – фундаментная рама; 6 - турачки; 7 – подшипниковые щиты грузового вала; 8 – цепные звездочки
На крупнотоннажных судах применяются якорные механизмы с одной цепной зве-
здочкой на горизонтальном рабочем валу. Их называют полубрашпилями. Каждый полу-
брашпиль имеет свой электропривод, что значительно упрощает технологию съемки с двух якорей и облегчает режим работы двигателя.
Якорно-швартовные лебедки
Якорно-швартовные лебедки представляют собой комбинированный механизм с общим электроприводом, избирательно работающим или на якорную звездочку, или на швартовный барабан ( рис. 12.2 )..
В некоторых случаях, учитывая технологию комплектации, такие устройства назы-
вают швартовными лебедками с якорной приставкой.
Лебедка имеет устройство измерения натяжения и может работать при удержании судна на швартовах в автоматическом режиме.
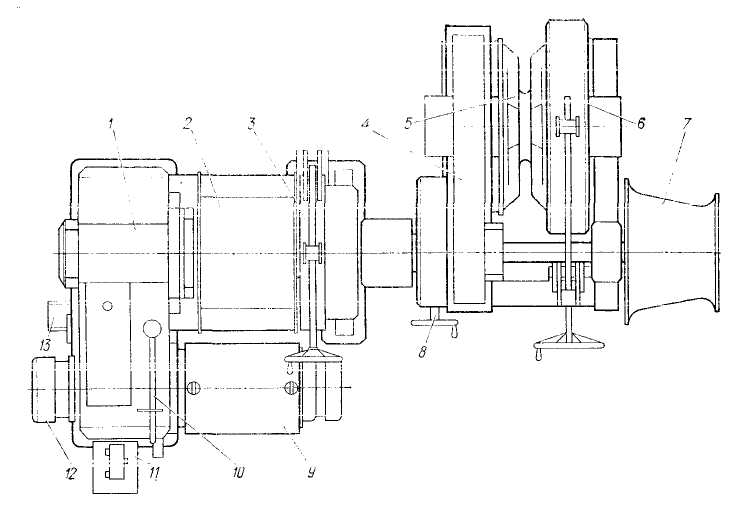
Рис. 12.2. Автоматическая швартовная лебедка с якорной приставкой:
1 - редуктор лебедки; 2 - грузовой барабан; 3 - ленточный тормоз; 4 – редуктор
привода якорной звездочки; 5 - якорная звездочка; 6 - ленточный тормоз звездо
чки; 7 - швартовный турачек; 8 - привод расцепления якорной звездочки; 9 - элек
тродвигатель; 10 - переключатель редуктора для работы на барабан или турачек;
11- командо-аппарат измерителя натяжения; 12 - муфта ускоренного хода; 13 - аппарат контроля предельной длины вытравленного каната
Шпили
Шпили имеют вертикальное расположение грузовой оси ( рис. 12.3 ). Основная часть редуктора и электропривод располагаются под палубой, что обеспечивает лучшую защищенность оборудования и удобство обслуживания.
Шпили выполняются или якорно-швартовными, имеющими якорную звездочку и швартовный барабан, или чисто швартовными. В механизме наиболее употребителен червячный редуктор.
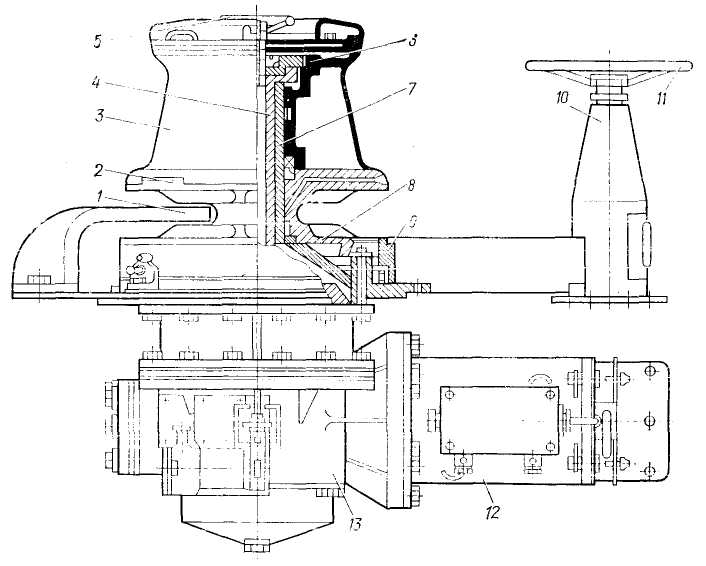
Рис. 12.3. Якорно-швартовный шпиль:
1 – скоба-отбойник; 2 – кулачковая муфта; 3 – турачек; 4 – пустотелый вал; 5 –
- маховик включения звездочки; 6 – зубчатая муфта; 7 – палубный стакан; 8 –
- цепная звездочка; 9 – ленточный тормоз; 10 – кнопка управления ленточным тормозом; 11 – маховик; 12 – электродвигатель; 13 – червячная передача
Швартовные лебедки
Швартовные лебедки предназначены в основном для швартовных операций. Ба-
рабан лебедки одновременно обеспечивает хранение швартовного каната. Электропривод лебедки может работать в режиме ручного, дистанционного или автоматического управления.
5. Количественные характеристики ЯШУ
Число якорей зависит от водоизмещения судна и составляет 2..3. При этом на судах
неограниченного района плавания якорей – 3, один из которых – запасной.
Масса якорей зависит от водоизмещения судна : на судах водоизмещением 250…
…400 Т масса одного якоря составляет 300 кг, водоизмещением 70 000…100 000 Т –
11 000 кг.
Суммарная длина обеих якорных цепей зависит от водоизмещения судна и состав
ляет 110…770 м; например, для судна водоизмещением 2 000 т суммарная длина составля
ет 412,5 м, для судна с водоизмещением 20 000 т - 550 м;
Якорная цепь состоит из отдельных смычек длиной 25….27,5 м каждая. Смычкой
называется участок якорной цепи, состоящий из последовательно соединенных звеньев.
В пределах каждой смычки звенья выполнены неразъемными.
6. Виды управления ЯШУ
На транспортных судах, занятых перевозкой грузов, применяются якорно-швартов
ные устройства при сравнительно ограниченном уровне автоматизации.
Основным является ручное местное или дистанционное управление. Вместе с тем все чаще используются системы автоматического регулирования натяжения швартовных канатов, дистанционная отдача якоря.
В современном судостроении фирмы-поставщики оборудования имеют нормализо-
ванные ряды полностью укомплектованных якорно-швартовных механизмов, удовлетво-
ряющих условиям эксплуатации на судах и требованиям классификационных обществ.
Дата: 2019-02-02, просмотров: 865.