При переключении обмотки статора вторым способом двигатель при пуске включа
ют в сеть по схеме «треугольник» ( рис.9.19, б ), этом питание сети подается на выводы С1, С2 и С3. Секционные группы Н1-К1 и Н2-К2 в каждой из трех фазных обмоток соеди-
нены последовательно.
Для перехода на «двойную звезду» точно так же, как в предыдущем случае, а имен-
но:
а ) снимают питание с выводов С1, С2 и С3;
б ) при помощи контактов первого трехполюсного контактора соединяют вместе вы
воды Н1 и К2;
в ) при помощи контактов второго трехполюсного контактора подают питание на средние выводы С4, С5 и С6 фазных обмоток
В результате этих переключений секционные группы в каждой фазной обмотке сое
диняются параллельно, в целом образуя две «звезды», включены параллельно.
При переходе с «треугольника» на «двойную звезду:
1. мощность увеличивается на 16%, т.е. почти не изменяется ( отсюда название
способа - «регулирование скорости при постоянной мощности» );
. 2. скорость увеличивается в 2 раза;
3. момент двигателя уменьшается почти в 2 раза ( М  = 0,58 М
= 0,58 М  ).
).
На судах регулирование скорости переключением обмотки статора со «звезды» на
«двойную звезду» применяют в грузоподъемных механизмах, т.к. при этом способе крити
ческий момент двигателя не изменяется и потому отсутствует опасность опрокидывания двигателя. В то же время такая опасность существует при переключением обмотки стато-
ра с «треугольника» на «двойную звезду», потому что момент двигателя уменьшается по-
чти в 2 раза ( М = 0,58 М ).
. На судах переключение обмотки статора с «треугольника» на «двойную звезду» применяют ограниченно, в электроприводах якорно-швартовных устройств для получения последней, самой высокой скорости, которая используется для перемещения свободного
( ненагруженного ) швартовного каната.
Электрическое торможение асинхронных двигателей
Основные сведения
Электрическое торможение применяют только в электроприводах судовых грузо-
подъемных механизмов, с целью «сброса» скорости перед срабатыванием основного тормо
за. Тем самым облегчается работа основного тормоза, а именно: уменьшаются износ тор-
мозных колодок и их нагрев.
Кроме того , электрическое торможение ограничено применяют в некоторых сиcте-
мах судовой электроавтоматики, например, авторулевых типа АТР, АИСТ и др.
Различают 5 видов электрического торможения асинхронных двигателей:
1. динамическое;
2. рекуперативное;
3. торможение противовключением при активном статическом моменте;
4. торможение противовключением при реактивном статическом моменте.
5. однофазное.
Из всех видов торможения на судах чаще всего применяется рекуперативное ( в электроприводах грузоподъемных механизмов ).
3.2. Рекуперативное торможение асинхронных двигателей
В судовых условиях рекуперативное торможение наступает в двух случаях:
1. всякий раз при переходе с большей скорости на меньшую;
2. при спуске тяжелого груза.
Рассмотрим оба случая поочередно.
Рекуперативное торможение при переходе с большей скорости на мень-
Шую
Рассмотрим процесс рекуперативного торможения на примере перехода с «двойной звезды» на «звезду» ( рис. 9.20 ).
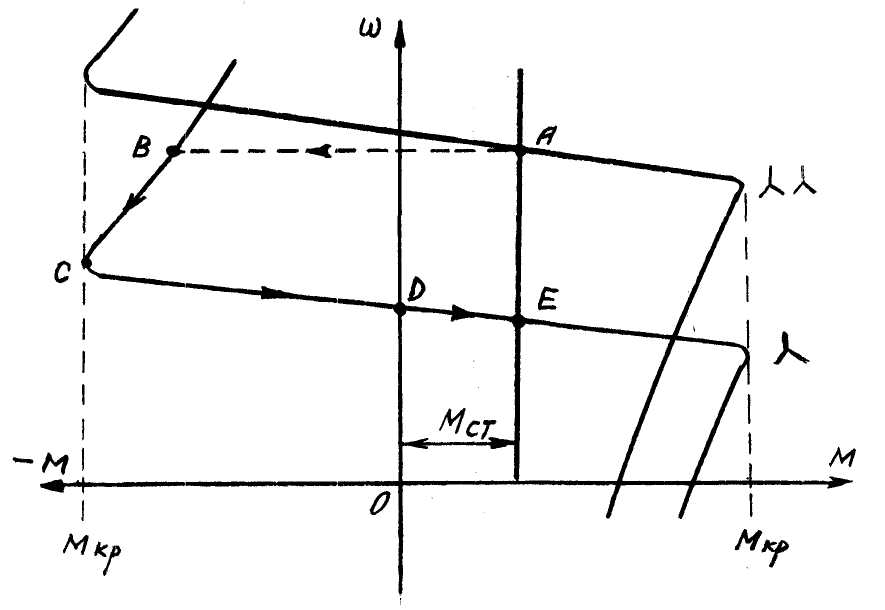
Рис. 9.20. Рекуперативное торможение при переходе с «двойной звезды» на «звезду»
Перед началом торможения двигатель работает в точке «А» в установившемся ре-
жиме, при котором вращающий электромагнитный момент двигателя равен тормозному статическому механизма, М = М  , скорость двигателя постоянна и соответствует точке «А». Например, пусть частота вращения ротора n = 2940 об / мин, а скорость вращения
, скорость двигателя постоянна и соответствует точке «А». Например, пусть частота вращения ротора n = 2940 об / мин, а скорость вращения
магнитного поля обмотки статора n  = 3000 об / мин, т.е. ротор отстает от магнитного по-
= 3000 об / мин, т.е. ротор отстает от магнитного по-
ля.
Для торможения двигателя отключают обмотку «двойной звезды» и включают об-
мотку «звезды». Двигатель при постоянстве скорости ( n = 2940 об / мин ) переходит из точки «А» в точку «В».
На «звезде» скорость вращения магнитного поля обмотки статора n = 1500 об / мин, а сам ротор по инерции вращается с прежней скоростью n = 2940 об / мин, т.е. обгоня
ет магнитное поле обмотки статора. Начиная с точки «В» и на участке «ВСD» асинхрон-
ный двигатель переходит в генераторный режим, преобразуя механическую энергию, полу
чаемую от движущихся масс привода, в электрическую, возвращаемую в судовую сеть.
При этом знак электромагнитного момента двигателя изменяется на противополож-
ный, т.е. этот момент становится тормозным.
. Поэтому, начиная с точки «В», к валу двигателя приложены два тормозных момен-
та – статический М механизма и электромагнитный М двигателя.
Под совместным действием этих моментов двигатель быстро уменьшает скорость ротора по траектории «ВСD», причем в точке «D» скорость ротора уменьшается до скоро
сти вращения магнитного поля обмотки статора n = 1500 об / мин.
Поскольку в точке «D» скорости ротора и магнитного поля одинаковы, двигатель в этой точке переходит режим идеального холостого хода, его электромагнитный момент М = 0.
Однако в точке «D» к валу двигателя остается приложенным второй тормозной мо-
мент – статический момент механизма М . Под действием последнего скорость ротора
продолжает уменьшаться, и на отрезке «DE» станет меньше скорости магнитного поля об-
мотки статора. Двигатель перейдет из режима идеального холостого хода в обычный дви
гательный режим, причем переходный процесс закончится в точке «Е».
Особенности торможения:
1. торможение наступает при условии: ротор обгоняет магнитное поле обмотки
статора, т.е. n > n ;
2. при торможении асинхронный двигатель работает как асинхронный генератор, преобразуя механическую энергию, получаемую от движущихся масс привода, в электри
ческую, возвращаемую в судовую сеть;
3. тормозной момент на валу двигателя сохраняется только на отрезке «ВСD» меха
нической характеристики «звезды»;
4. рекуперативное торможение при переходе с большей скорости на меньшую ши-
роко применяется в электроприводах судовых грузоподъемных устройств, для предвари-
тельного сброса скорости перед наложением основного электромеханического тормоза.
. 3.4. Рекуперативное торможение при спуске тяжелого груза
Рассмотрим процесс рекуперативного торможения при спуске тяжелого груза
( рис. 9.21 ).
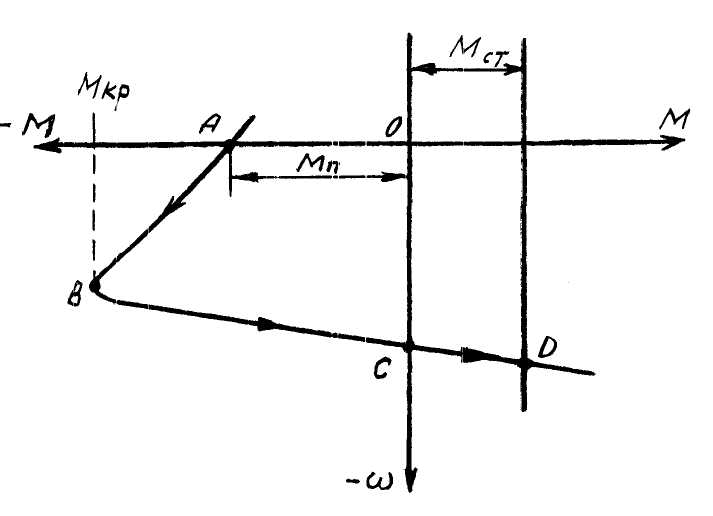
Рис. 9.21. Рекуперативное торможение при спуске тяжелого груза
Для получения этого вида торможения двигатель включают в направлении на «спуск», сразу же переводя привод в режим силового спуска.
При пуске двигатель развивает пусковой момент М  , который направлен согласно со статическим моментом механизма М .
, который направлен согласно со статическим моментом механизма М .
Под совместным действием этих моментов двигатель быстро набирает скорость по траектории «АВС», причем в точке «С» скорость ротора увеличивается до скорости вра-
щения магнитного поля обмотки статора.
Поскольку в точке «С» скорости ротора и магнитного поля одинаковы, двигатель в этой точке переходит режим идеального холостого хода, его электромагнитный момент М = 0.
Однако в точке «С» к валу двигателя остается приложенным второй тормозной мо-
мент – статический момент механизма М . Под действием последнего скорость ротора
продолжает увеличиваться , и на отрезке «СD» станет больше скорости магнитного поля обмотки статора. Двигатель перейдет из режима идеального холостого хода в режим подъ
ема груза, причем переходный процесс закончится в точке «D».
Т.о., на отрезке «СD» электромагнитный момент двигателя направлен на подъем, а фактически происходит спуск груза. Поэтому электромагнитный момент является тормоз-
ным, его роль заключается в том, что он стабилизирует скорость спуска груза, не давая
грузу разгоняться свыше скорости, соответствующей точке «D».
Особенности торможения:
1. торможение наступает при условии n > n , т.е. ротор обгоняет магнитное поле
обмотки статора;
2. при торможении асинхронный двигатель работает как асинхронный генератор, преобразуя механическую энергию, получаемую от движущихся масс привода, в электри
ческую, возвращаемую в судовую сеть;
3. тормозной момент на валу двигателя сохраняется только на отрезке «АВС» меха
нической характеристики «звезды»;
4. рекуперативное торможение при спуске тяжелого груза ограничено применяется
в электроприводах судовых грузоподъемных устройств с целью стабилизации скорости опускания груза.
Дата: 2019-02-02, просмотров: 458.