Асинхронные двигатели с фазным ротором пускают в ход с помощью резисторов, включаемых в цепь ротора, что позволяет уменьшить пусковой ток и увеличить пусковой момент двигателя ( рис. 9.17 )..
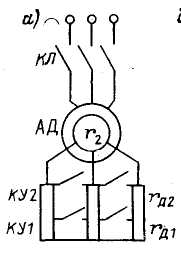
Рис. 9.17. Схема пуска асинхронного двигателя с фазным ротором
Для пуска двигателя включают линейный контактор КЛ, через контакты которого
обмотка статора двигателя подключается к питающей сети «напрямую».Контакты КУ1 и
КУ2 контакторов ускорения при пуске должны быть разомкнуты. Тем самым последова-
тельно в каждую из трех фазных обмоток ротора вводятся обе ступени добавочных ( пус
ковых ) резисторов r  и r
и r  . Эти ступени увеличивают общее ( эквивалентное ) сопро
. Эти ступени увеличивают общее ( эквивалентное ) сопро
тивление цепей фазных обмоток ротора, что ( см. выше ) приводит, с одной стороны, к уменьшению пускового тока, с другой – к увеличению пускового момента.
Когда двигатель разгонится до скорости 30-40% номинальной, отключают первую ступень r , для чего замыкают контакты КУ1.
Двигатель с броском тока продолжает разгоняться, и при скорости 60-70% номи-
нальной отключают вторую ступень r , для чего замыкают контакты КУ2.
Двигатель после отключения резисторов r и r продолжает разгоняться до номи
нальной скорости.
Отключение резисторов можно производить вручную – при помощи контроллеров, или полуавтоматически – при помощи более сложных про устройству магнитных станций. Следует отметить, что, кроме указанных достоинств – увеличенный пусковой мо-
мент, меньший пусковой ток, двигатели специального исполнения имеют существенные недостатки:
1. более сложное устройство обмоток роторов;
2. наличие щеточного устройства у двигателей с фазным ротором, снижающее
надежность двигателя;
3. худшие эксплуатационные характеристики, а именно - меньшие значения коэф
фициента полезного действия и коэффициента мощности.
На судах из перечисленных выше типов двигателей специального исполнения огра
ниченное применение нашли двигатели с двумя клетками на роторе – в электроприводах грузовых лебедок ( суда польской постройки типа «Муром» ), и более широкое примене-
ние – двигатели с фазным ротором. Их применяют на многих сериях судов в электроприво
дах грузовых кранов и брашпилей.
1.5. Пуск при пониженном напряжении на обмотке статора
Для уменьшения пусковых токов применяют схемы пуска при пониженном напряже
нии:
1. включением резисторов в цепь обмотки статора ( рис. 9.13, а);
2. включением индуктивных сопротивлений в цепь обмотка статора (рис. 9.13, б);
3. включением обмотки статора через автотрансформатор ( рис.9.13, в );
4. переключением обмотки статора со «звезды» на «треугольник» ( рис.9.13, г ).
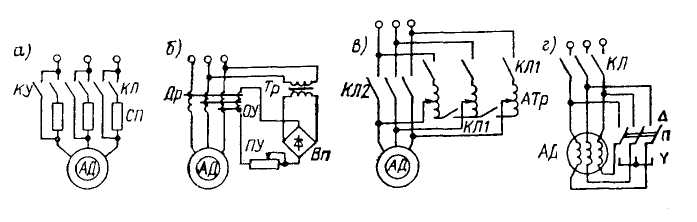
Рис. 9.13. Схемы пуска асинхронного двигателя при пониженном напряжении
В схеме на рис. 9.13, а при пуске замкнуты контакты линейного контактора КЛ, по-
этому обмотка статора подключается к питающей сети через пусковые токоограничиваю-
щие резисторы СП. После того, как двигатель наберет обороты, а пусковой ток уменьшит-
ся до безопасных значений ( обычно 2…2,5 номинального ), схема управления замыкает контакты второго контактора – ускорения КУ, при этом двигатель подключается к сети «напрямую».
В схеме на рис. 9.13, б для ограничения пусковых токов последовательно с обмот-
кой статора включены токоограничивающие рабочие обмотки дросселя насыщения Др. Его обмотка управления ОУ питается постоянным током через понижающий трансформа-
тор Тр и выпрямитель Вп.
При пуске индуктивное сопротивление рабочих обмоток дросселя должно быть максимальным, поэтому ток в обмотке управления ОУ должен быть минимальным. Для этого ползунок резистора поста управления ПУ должен находиться в крайнем правом по-
ложении.
После пуска ток в обмотке управления ОУ постепенно увеличивают, для чего пере
мещают ползунок ПУ влево. Индуктивное сопротивление рабочих обмоток постепенно уменьшается.
Когда ползунок ПУ перемещен влево до упора, пуск закончен. При таком положе-
нии ползунка индуктивное сопротивление рабочих обмоток дросселя практически равно нулю, что равнозначно прямому подключению обмотки статора к питающей сети.
В схеме на рис. 9.13, в использованы два контактора – регулировочный КЛ1 и ли-
нейный КЛ2, а также автотрансформатор АТр.. При пуске включается контактор КЛ1, при замыкании нижних контактов которого образуется нулевая точка «звезды» трех фазных обмоток автотрансформатора, а через верхние контакты подается питание питающей сети на верхние выводы этих обмоток.
В момент пуска ползунки автотрансформатора должны находиться в крайнем ниж-
нем положении, при этом обмотка статора асинхронного двигателя закорочена через ниж-
контакты КЛ1, т.е. напряжение на ней равно нулю. Поэтому скорость ротора также равна нулю, ротор неподвижен.
Для пуска ползунки автотрансформатора постепенно перемещают вверх, при этом
напряжение, снимаемое с обмоток автотрансформатора на обмотку статора также посте-
пенно увеличивается. Поэтому скорость двигателя также увеличивается.
Пуск закончен, если ползунки автотрансформатора перемещены в крайнее верхнее положение. При этом на обмотку статора подается полное напряжение питающей сети, ав-
тотрансформатор не нужен.
В этот момент времени включается линейный контактор КЛ2 и отключается регу-
лировочный КЛ1. При замыкании контактов КЛ2 обмотка статора двигателя подключает-
ся к питающей сети «напрямую», а при размыкании контактов КЛ1 автотрансформатор отключается от обмотки статора двигателя ( он уже выполнил свою роль ).
В схеме на рис. 9.13, г использован линейный контактор КЛ и переключатель «зве-
зда»-«треугольник» П. Для пуска включают линейный контактор КЛ, через замыкающие-
ся контакты которого напряжение питающей сети подается на верхние выводы обмотки статора двигателя АД. После этого переводят переключатель в нижнее положение «звез-
да». При этом нижние выводы обмотки статора соединяются вместе, в нулевую точку, обмотка статора соединена «звездой».
После того, как двигатель наберет обороты и перестанет увеличивать скорость, пе-
реключатель переводят в верхнее положение «треугольник». Двигатель с броском тока переключается со «звезды» на «треугольник», после чего разгоняется на «треугольнике» до скорости, зависящей от статического момента механизма.
Этот способ нашёл самое широкое применение на судах ввиду его простоты ( не требуются резисторы, индуктивные сопротивления или автотрансформаторы ) и эффектив
ности - пусковой ток уменьшается в 3 раза.
Следует особо подчеркнуть, что переключение обмотки статора со «звезды» на «треугольник» применяется для пуска, а не для регулирования скорости асинхронного двигателя. Это объясняется тем, что скорость двигателя на «треугольнике» незначительно
больше скорости на «звезде».
Все 4 рассмотренные выше схемы пуска при пониженном напряжении имеют один и тот же принципиальный недостаток: резкое уменьшение пускового момента двигателя,
поскольку электромагнитный момент двигателя пропорционален квадрату напряжения.
Например, если при пуске напряжение понижено до значения U' = 0,8U  , то пуско
, то пуско
вой момент двигателя составит
М'  = (U' / U )
= (U' / U )  *М = ( 0,8 )
*М = ( 0,8 )  * М = 0,64 М ( т.е. 64% М ).
* М = 0,64 М ( т.е. 64% М ).
Иначе говоря, при провале напряжения на 20% двигатель уменьшает пусковой мо-
мент на 36% ( 64% = 100% – 36% ).
Поэтому пуск при пониженном напряжении можно применять для механизмов, у
которых на малых скоростях статический момент невелик. К таким механизмам относятся центробежные насосы и вентиляторы, у которых статический момент пропорционален квадрату скорости ( т.е. на малых скоростях мал и статический момент ).
2. Способы регулирования частоты вращения 3-фазных асинхронных двига-
Телей
Основные сведения
Формула частоты вращения асинхронного двигателя имеет вид
n = 60f ( 1 – s ) / р,
где:
n – частота вращения, об/мин;
f – частота тока питающей сети;
s – скольжение ротора ( относительное отставание ротора от магнитного поля об-
мотки статора );
р – число пар полюсов.
Из формулы следует, что регулировать скорость асинхронного двигателя можно тремя способами:
1. изменением частоты тока питающей сети;
2. изменением скольжения;
3. изменением числа пар полюсов.
Кроме того, существует 4-й способ – изменением напряжения на обмотке статора.
Коротко объясним особенности каждого способа регулирования
Регулирование скорости изменением частоты тока питающей сети – плавное, но
требует применения громоздких и дорогих тиристорных преобразователей частоты. На су-
дах этот способ нашел ограниченне применение, в основном, в электроприводах тяжело-
весных лебёдок, грузовых и портальных кранов.
Регулирование скорости изменением скольжения применимо только для двигателей
с фазным ротором, т.к. осуществляется введением резисторов в цепь фазного ротора. Регу
лирование плавное, но требует применения громоздких пускорегулировочных реостатов, в которых выделяется большое количество тепла.
На судах этот способ нашел ограниченне применение, в основном, в электроприво
дах тяжеловесных лебёдок и кранов, а также в брашпилях.
Регулирование скорости изменением числа пар полюсов применяют только для дви-
гателей с короткозамкнутым ротором. Теоретически его можно применить и для двигате-
лей с фазным ротором, но в этом случае одновременно с переключением в обмотке стато-
ра необходимо производить аналогичные переключения и в обмотке ротора. Это вызовет недопустимое усложнение конструкции и увеличение массо-габаритных параметров дви-
гателя.
Недостаток регулирования – его ступенчатость ( в соотношении 1:2:4 или 1:2:6 ) и высокая стоимость полюсопереключаемых электродвигателей.
Область применения на судах – самая распостранённая, в электроприводах грузо-
вых лебёдок и кранов, а также брашпилей и шпилей.
Регулирование скорости изменением напряжения на обмотке статора на судах не
нашло широкого применения из-за 2-х недостатков:
1. требуется отдельное устройство ( регулятор напряжения ), позволяющее плавно
изменять его выходное напряжение как по величине, так и по фазе;
2. при понижении напряжения возникает опасность опрокидывания двигателя, т.к. при этом резко ( в квадрате ) уменьшается вращающий момент двигателя.
Область применения на судах – ограниченная, в основном, в системах судовой эле
ктроавтоматики ( рулевые приводы и авторулевые ) для изменения скорости двухфазных асинхронных двигателей мощностью до 150-200 Вт.
На судах до сих пор наиболее распостраненный способ регулирования – путем из-
менения числа пар полюсов. Он применяется в електроприводах грузоподъемных меха-
низмов и якорно-швартовных устройств.
Регулирование скорости изменением числа пар полюсов обмотки статора.
Дата: 2019-02-02, просмотров: 450.