В схеме динамического торможения ( рис. 9.8, а ) используются контакт КТ тормозного контактора контакт КЛ линейного. Эти контакты всегда находятся в противоположном состоянии: если замкнут контакт КЛ, разомкнут контакт КМ, и наоборот.
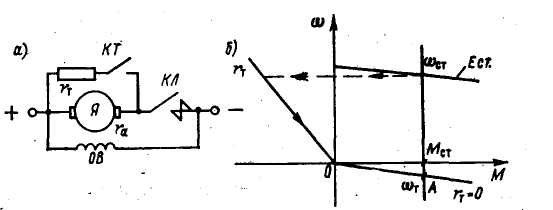
Рис. 9.8. Схема ( а ) и механические характеристики ( б ) при динамическом торможении двигателя постоянного тока
До начала торможения, при работе двигателя, контакт КЛ замкнут, контакт КТ разом
кнут. Двигатель подключен к сети и вращается со скоростью ω  .
.
Ток в обмотке якоря
I  = ( U – E ) / r
= ( U – E ) / r  ,
,
где: Е = k ω Ф - противоЭДС обмотки якоря, прямо пропорциональная скорости двигателя ω .
Этот ток протекает через якорь в направлении слева направо ( в соответствии с по
лярностью напряжения питающей сети ).
Для торможения размыкают контакт КЛ и замыкают КТ. При размыкании контакта КЛ двигатель отключается от сети, поэтому напряжение на обмотке якоря U = 0.
При замыкании контакта КТ к обмотке якоря двигателя подключается тормозной токоограничивающий резистор r  , причём обмотка якоря и резистор соединены последо-
, причём обмотка якоря и резистор соединены последо-
вательно.
Ток в такой цепи определяется по закону Ома
I = ( U – E ) / ( r + г ) = (0-Е)/ ( r + г ) = - Е/( r + г ).
В этой формуле ток якоря имеет знак «минус», значит, направление тока в обмотке якоря изменилось на обратное - справа налево.
Изменение направления тока приводит к изменению знака электромагнитного момента двигателя М = k( - I )Ф <0, этот момент становится тормозным.
Двигатель переходит на искусственную тормозную характеристику во 2-м квадран-
те и постепенно уменьшает скорость. По мере уменьшения скорости уменьшается противо
ЭДС Е = k ωФ, ток якоря и электромагнитный момент.
В момент остановки якоря ( точка 0 на механической характеристики ) скорость
ω = 0, противоЭДС Е = 0, ток якоря I = 0 и электромагнитный момент двигателя М = 0.
При реактивном статическом моменте ( насос, вентилятор ) процесс торможения закончится в точке 0.
При активном статическом моменте процесс может иметь продолжение, а именно: если в точке 0 двигатель не затормозить, он под действием груза реверсирует и станет раз
гоняться в обратном направлении до скорости ω  .
.
Полярность противоЭДС изменится на обратную, т.к. Е = k( - ω)Ф < , поэтому
также на обратное изменится направление тока якоря
I = - ( - Е) /( r + г ) = Е /( r + г ) > 0.
Поэтому изменится на обратный знак электромагнитного момента, т.е. он вновь стал вращающим, направленным на подъём. При этом двигатель работает в режиме тормоз
ного спуска, притормаживая груз и ограничивая скорость спуска груза значением скорости ω ( точка А ).
Особенности торможения:
1. простота торможения, т.к. для его получения нужен тормозной контактор КТ и тормозной резистор;
2. торможение позволяет полностью остановить якорь ( т. «0» на рис. 9.8, б );
3. торможение широко применяется в электроприводах грузоподъемных механиз-
мов для предварительного сброса скорости перед срабатыванием основного, электромаг-
нитного тормоза, обеспечивающего полную остановку груза.
3.3. Рекуперативное торможение двигателя постоянного тока
Известно, что электрические машины обратимы, т.е. одна и та же электрическая машина может работать как генератор, так и электродвигатель.
При рекуперативном торможении электродвигатель переходит в генераторный ре-
жим. При этом двигатель преобразует механическую энергии, полученную от движущих
ся частей привода, в электрическую, которую двигатель возвращает в судовую электриче-
скую сеть.
Рекуперативное торможение наступает в следующих случаях:
1. при движении электровоза под уклон ( что невозможно в судовых условиях );
2. при переходе двигателя с большей скорости на меньшую ( происходит каждый
раз автоматически );
3. при опускании тяжелых грузов.
В любом из этих случаев выполняется одно и то же условие рекуперативного тормо
жения: противоЭДС обмотки якоря двигателя Е = сωФ должна cтать больше напряже
ния питающей сети U.
В этом случае ток якоря двигателя
I  = ( U – E ) / r
= ( U – E ) / r  < 0,
< 0,
т.е. изменяет свой знак на обратный.
Поэтому изменяет свой знак и электромагнитный момент двигателя М = с ( - I )Ф,
который становится тормозным.
В судовых условиях рекуперативное торможение может наступить при спуске тя
желого груза, когда двигатель переходит в режим генератора, преобразуя механическую энергию опускающегося груза в электрическую энергию, возвращаемую в сеть;
Однако использование возвращаемой в судовую сеть энергии практически невоз-
можно вследствие кратковременности работы двигателя в генераторном режиме ( с уче-
том ограниченной высоты трюма ).
Более того, это торможение опасно тем, что при одновременном переходе большо-
го числа грузовых лебедок в режим рекуперативного торможения возможен переход гене
раторов судовой электростанции в двигательный режим с последующим их отключени-
ем по обратному току ( при помощи реле обратного тока ). При этом судно обесточивает-
ся. Такие случаи имели место на судах типа «Ленинский комсомол».
Поэтому на судах этой серии параллельно обмоткам якорей двигателей лебедок стали включать реле максимального напряжения, которые при напряжении на якоре U = 225…235 В, т.е. при переходе лебедок в режим рекуперативного торможения, отключали питание судовой сети от данной лебедки.
В то же время на электротранспорте электроэнергия, возвращаемая в сеть при реку
перативном торможении, позволяет уменьшить общий расход электроэнергии на 15…20%
При этом электровозы, идущие под уклон и работающие в режиме рекуперативного торможения, питают электроэнергией электровозы, идущие на подъем.
Положительная роль рекуперативного торможения при спуске тяжелых грузов со
стоит в том, что тормозной электромагнитный момент двигателя стабилизирует скорость спуска груза, не позволяя ему разгоняться свыше определенной скорости.
Дата: 2019-02-02, просмотров: 488.