сти, конечные и путевые выключатели, и др. );
3. пуско-регулировочную – для пуска и регулирования различных параметров
электрических установок ( пускатели, пусковые и пуско-регулировочные реостаты, регуляторы возбуждения и др. );
4. контролирующую – для контроля заданных режимов работы электрических
установок ( реле температуры, давления, уровня, частоты вращения и др. ).
3. По принципу действия электрические аппараты делятся на 4 вида:
1. электромагнитные ( реле тока, напряжения и др.);
2. индукционные ( реле обратной мощности );
3. тепловые ( тепловые реле );
4. контактно-механические ( контроллеры, командоконтроллеры, конечные выключатели ).
4.По напряжению электрическая аппаратура делится на низковольтную ( до 230 В ) и высоковольтную ( свыше 230 В ).
5. По конструктивному исполнению электрические аппараты делятся на 4 вида:
1. открытые, не имеющие защитного корпуса и встраиваемые внутрь распределительных щитов, магнитных станций и т.п.;
2. брызгозащищенные, имеющие легкий корпус, защищающий от попадания
брызг;
3. водозащищенные, находящиеся внутри корпуса, защищающего от проникнове-
ния воды при помощи резиновых прокладок;
4. герметичные, предназначенные для работы под водой при определенном давле-
нии.
6. По способу управления различают электрическую аппаратуру:
1. ручного управления ( кнопочные посты управления, контроллеры, командокон
троллеры и др. );
2. автоматического управления ( автоматические пускатели, станции управления и
др. ).
7.По режиму работы различают электрическую аппаратуру продолжительного
( S1 ), кратковременного ( S2 ) и повторно-кратковременного ( S3 ) режима работы. В ре-
жиме S1 работают электроприводы вентиляторов и некоторых насосов, в режиме S2 – якорно-швартовные устройства, шлюпочные и траповые лебедки, в режиме S3 - грузовые лебедки и краны. Всего же режимов работы – 8 ( S1…S8 ),4 – повторно-кратковременный, включая пуск; S5 – повторно-кратковременный, включая электрическое торможение; S6 – продолжительный при переменной нагрузке; S7 – продолжительный , включая электриче-
ское торможение, S8 – режим работы при периодическом изменении частоты вращения и нагрузки ). Однако судовые электроприводы работают, в основном, в режимах S1, S2 и S3.
8. По наличию перемещающихся ( подвижных ) контактов электрические аппа
раты делятся на 2 группы( ГОСТ 17703 – 72 ) :
1. контактные;
2. бесконтактные.
В контактных аппаратах переключение электрической цепи происходит путем
перемещения контактных деталей аппарата относительно друг друга, а в бесконтактных –
без такого перемещения деталей аппарата. В качестве контактных деталей применяются подвижные и неподвижные медные контакты , бесконтактных – полупроводниковые приборы – транзисторы и тиристоры.
Командоаппараты
2.1. Основные сведения
Командоаппаратами называют устройства, предназначенные для переключения
цепей управления электроприводами под воздействием оператора или механизма.
К командоаппаратам относятся:
1. кнопочные посты управления;
2. командоконтроллеры;
3. универсальные переключатели;
4. путевые и конечные выключатели.
Кнопочные посты управления
Кнопочный пост управления – это электротехническое устройство, состоящее из
одной и более кнопок управления. Кнопочные посты управления тельферов – передвиж-
ных тележек для перемещения поршней главного двигателя, имеют 9 кнопок управления.
Кнопка управления ( кнопочный элемент ) – это коммутационный аппарат с ручным приводом.
Различают 2 типа кнопок:
1. кнопки с самовозвратом;
2. кнопки с самоудержанием.
В кнопках с самовозвратом имеется возвратная пружина, возвращающая контакт
кнопки в исходное состояние после прекращения нажатия кнопки ( рис. 9.24, а ).
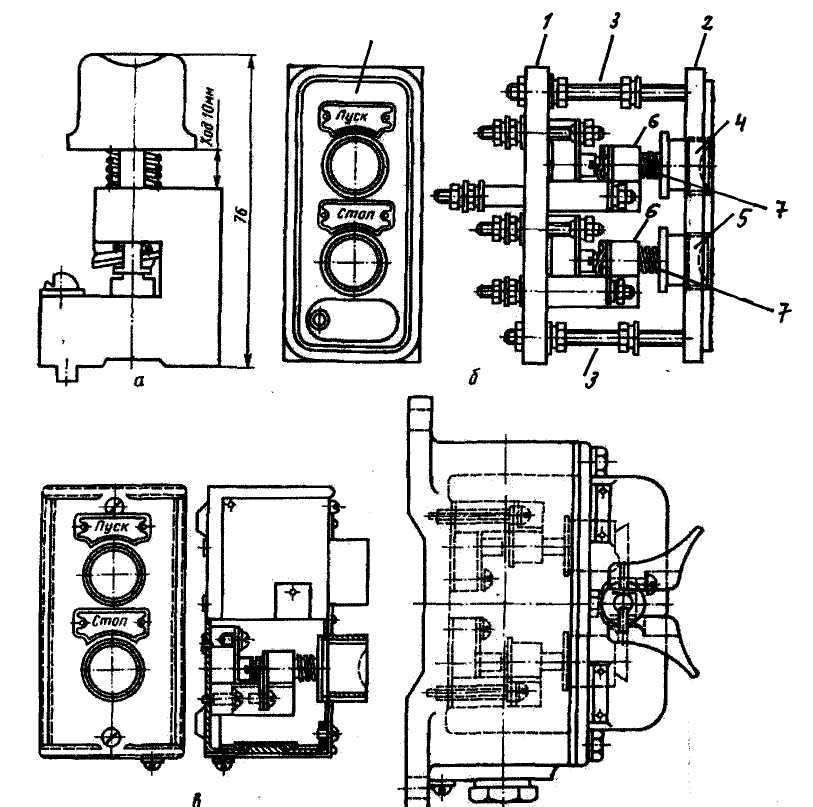
Рис. 9.24. Конструктивные формы кнопочных постов: а - кнопочный элемент; б – открыто утопленный пост; в – защищенный кнопочный пост; 4 – водозащищенный
кнопочный пост; 1 – основание; 2 – лицевая панель; 3 – шпильки стяжные; 4 –
кнопка «Пуск»; 5 – кнопка «Стоп»; 6 – толкатели; 7 – возвратные пружины
Кнопочный пост с двумя кнопками «Пуск» и «Стоп» ( рис. 9.24,б ) состоит из па-
раллельно расположенных основания 1 и лицевой панели 2 , жестко соединенных при по-
мощи шпилек 3. На основании закреплены кнопочные элементы 4 - «Пуск» и 5 – «Стоп». Каждый элемент включает в себя пару контактов - подвижный и неподвижный, толкатель 6 ( шток ), возвратную пружину 7 и собственно кнопку.
Если кнопка не нажата, то пара контактов кнопки «Пуск» разомкнута, а кнопки «Стоп» замкнута. При нажатии кнопки «Пуск» подвижный контакт перемещается и замы-
кается с неподвижным, в этом месте образуется цепь тока. При нажатии кнопки «Стоп» подвижный и неподвижный контакты размыкаются, в этом месте образуется разрыв цепи.
Если кнопку ( любую ) отпустить, подвижные контакты под действием пружины возвращаются в исходное состояние.
Таким образом, кнопка «Пуск» имеет замыкающий контакт, а кнопка «Стоп» - раз-
мыкающий.
Условное обозначение кнопок показано на рис. 9.25. Наличие самовозврата обозна
чается при помощи небольшого треугольника, обращенного вершиной верх.
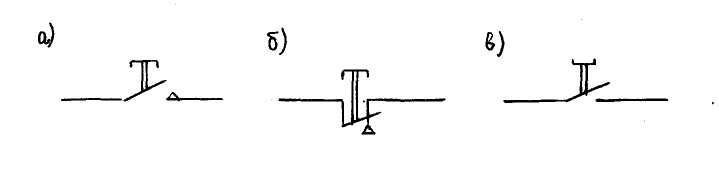
Рис. 9.23. Кнопки нажимные «Пуск» - а , «Стоп» - б и вытяжная - в
На рис. 9.25, а, б, в, верхняя часть изображения кнопок в виде буквы «П» обозна-
чает направление движения подвижной части кнопок. Таким образом, кнопки «Пуск» и «Стоп» надо нажимать в направлении сверху вниз, а вытяжную – вытягивать за её голов-
ку ( при вытягивании ее контакт замыкается ).
Командоконтроллеры
Командоконтроллер – это командоаппарат ручного управления, предназначенный для частого переключения контактов в цепях управления.
В зависимости от типа, командоконтроллеры имеют до 12 рабочих положение и до 12 цепей. Каждому рабочему положению соответствует определенный рабочий режим, например, «травить», «лево», «скоростной спуск», «выбирать», «право», «тяговый подъ-
ем» и т.п. Число цепей определяется схемой управления электропривода – чем больше функций выполняет схема, тем больше число цепей.
Основным элементом контроллера является переключающее устройство ( рис.
9.26 ).
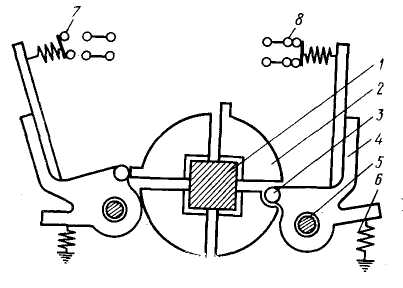
Рис. 9.26. Переключающее устройство командоконтроллера: 1 – вал; 2 – кулачковая шайба; 3 – ролик; 4 – пластмассовый рычаг; 5 – ось; 6 – пружина; 7 – подвижные контакты
8 – неподвижные контакты
Переключающее устройство состоит из вала квадратного сечения 1, который пово-
рачивается вручную рукояткой управления. На валу закреплены пластмассовые кулачко
вые шайбы 2 определенного профиля. Контактная система включает неподвижные контакты 8 и подвижные контакты мостикового типа 7, закрепленные на пластмассовом рычаге 4, который прижимается к кулачковой шайбе пружиной 6. Рычаг сидит на оси 5.
Поворот рукоятки управления вызывает поворот вала 1 с кулачковыми шайбами 2. Если при этом ролик 3 попадает во впадину шайбы, подвижный и неподвижный контакты замыкаются ( на рис. 9.26 - правая пара контактов ). Выход ролика из впадины приводит к размыканию контактов ( на рис. 9.26 – левая пара контактов ).
Каждое положение рукоятки аппарата фиксируется специальным храповым устрой
ством, состоящим из подпружиненного ролика и шестерни в виде звездочки. Ролик свя-
зан с корпусом аппарата, а звездочка находится на валу 1. Фиксированное положение рукоятки наступает при попадании ролика внутрь выемки на звездочке.
Командоконтроллеры могут иметь 4, 6 или 12 кулачковых элементов ( пар контак-
тов ) и от 1 до 6 положений рукоятки в одну сторону.
Командоконтроллер серии КМ-200 в сборе показан на рис. 9.27.
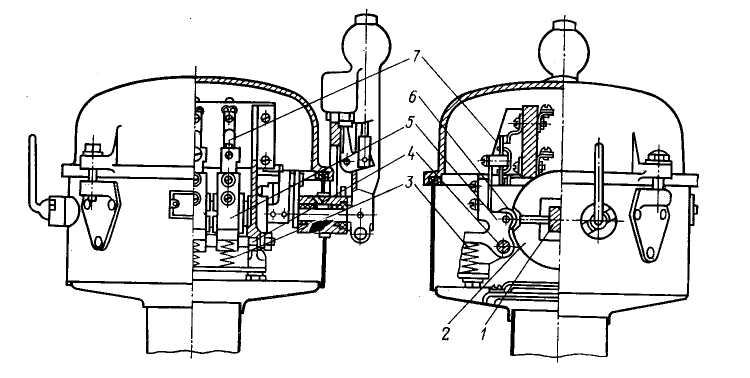
Рис. 9.27. Командоконтролер типа КМ-200: 1 – вал; 2 – кулачковые шайбы; 3 – пружина; 4 – ось рычага; 5 – рычаги; 6 – ролики; 7 – контакты
Положение контактов и их количество указывается в специальной таблице замыка-
ний контактов ( рис. 9.28 ).
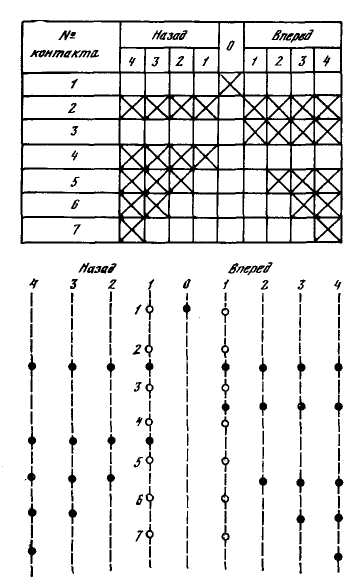
Рис. 9.28. Таблицы замыканий контактов: верхняя – с крестиками; нижняя – с точками
Эту таблицу можно изобразить двумя равнозначными способами:
1. в виде таблицы с крестиками;
2. в виде таблицы с точками.
Таблица с крестиками ( рис. 9.28, верхняя часть ) состоит из колонок и строчек.
В крайней левой колонке указаны номера подвижных контактов от 1 до 7. В осталь
ных колонках указаны номера нулевого и рабочих положений рукоятки командоконтрол-
лера. Нулевое положение обозначено цифрой «0», а рабочие положения – цифрами 1, 2, 3 и 4 в обоих направлениях - «Назад» и «Вперед».
В строчках напротив номеров контактов крестиками или пустыми клетками обо-
значается состояние контакта, а именно: если в каком-либо положении рукоятки контакт замкнут, в клетке стоит крестик, если контакт разомкнут – клетка пустая.
Например, контакт №1 замкнут только в нулевом положении ( «0» ) и разомкнут во всех рабочих ( «1», «2», «3», «4» в направлениях «Выбирать» и «Травить»).
Контакт №2 разомкнут в нулевом положении, но замкнут во всех рабочих.
Контакт №3 разомкнут в нулевом положении и в положениях 1, 2, 3 и 4 в направле
нии «Назад», но замкнут в положениях 1, 2, 3 и 4 в направлении «Вперед», и т.д.
Таблица с точками ( рис. 9.28, нижняя часть ) состоит из вертикальных пунктирных линий и строчек с точками. Номера вертикальных линий 0, 1, 2, 3 и 4 ( в обе стороны ) соответствуют положениях рукоятки командоконтроллера, а точки равнозначны крести-
кам - если в каком-либо положении рукоятки контакт замкнут, на вертикальной линии стоит точка, если контакт разомкнут – точки нет.
Например, контакт №1 замкнут только в нулевом положении, т.к. на вертикальной линии «0» стоит точка, и разомкнут во всех рабочих «1», «2», «3», «4» в направлениях «Выбирать» и «Травить» - на вертикальных линиях точки отсутствуют.
Дата: 2019-02-02, просмотров: 486.