Система Г-Д как минимум состоит из трех электрических машин:
1. исполнительного электродвигателя М2, приводящего в действие механизм;
2. генератора G1, питающего исполнительный ЭД;
3. приводного электродвигателя Ml, вращающего якоря генератора G1 и образую-
щего с ним так называемый преобразователь.
Машины М2 и G1 - постоянного тока с независимым возбуждением.
Несмотря на это, система Г-Д может применяться при любом роде тока питающей сети.
Если сеть постоянного тока, то в качестве приводного двигателя М1 применяют ЭД параллельного возбуждения, а обмотки возбуждения всех машин получают питание от сети.
Если сеть переменного тока, используют асинхронный приводной ЭД. Для питания обмоток возбуждения L1 G1 и LM2 в этом случае применяют четвертую машину – возбуди
тель G2. Это небольшой генератор постоянного тока с самовозбуждением. Он приводится во вращение тем же приводным электродвигателем М1 , что и генератор G1 ( рис. 9.3 ).
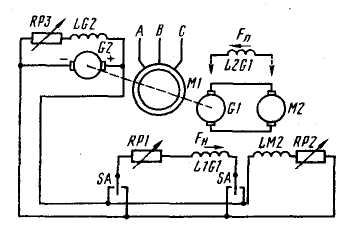
Рис. 9.3. Схема системы генератор – двигатель
Система действует следующим образом.
Сначала пускают приводной ЭД М1, якорь которого затем вращается постоянно в одну сторону с неизменной скоростью. Потом при помощи регулировочного резистора
( реостата возбуждения ) RP3 возбуждают возбудитель G2, создающий неизменное напря-
жение.
От него получают питание независимые обмотки возбуждения исполнительного электродвигателя LM2 и генератора L1 G1.
В цепь первой включен регулировочный резистор RP2, в цепь второй – регулиро-
вочный резистор RP1 и переключатель SA, изменяющий направление тока в обмотке L1 G1.
Перед пуском резистор RP1 должен быть полностью введен в цепь, а резистор RP2 - выведен.
Для пуска М2 переключатель SA устанавливают в одно из рабочих положений и
постепенно выводят резистор RP1, увеличивая этим ток возбуждения в обмотке L1 G1.
Последний возбуждается и подает плавно возрастающее напряжение на якорную обмотку М2. По цепи якорей G1 и М2 протекает ток.
Так как М2 возбужден, его якорь начинает вращаться, и по мере возрастания напря-
жения, подведенного к его якорю, увеличивается угловая скорость. При полностью выве-
денном резисторе RP1 напряжение G1 и угловая скорость М2 номинальные.
Для реверса переключателем SA изменяют направление тока в обмотке возбужде-
ния L1 G1. Генератора изменяет полярность напряжения, ток якорной цепи изменяет на-
правление, и исполнительный двигатель М2 реверсируется.
Регулирование скорости вниз от номинальной выполняют, вводя в цепь обмотки возбуждения L1 G1 регулировочный резистор RP1. Ток возбуждения, магнитный поток и напряжение генератора уменьшаются. Вследствие этого снижается напряжение, подведенное к обмотке якоря М2, и его угловая скорость уменьшается ( характеристики 3, 2 и 1 на
рис. 9.4 ).
Регулирование скорости вверх от номинальной осуществляют, вводя в цепь обмот-
ки возбуждения М2 регулировочный резистор RP2, что уменьшает ток и поток возбужде-
ния, при этом скорость ЭД увеличивается ( характеристики 5, 6 и 7 на рис. 9.4 ).
Рассмотренная система называется «система Г – Д в чистом виде» и на практике не применяется. Это объясняется тем, что при работе с номинальным напряжением на якоре М2 внезапная остановка этого якоря ( например, под винт попала льдина ) приводит к рез-
кому увеличению тока якорей двигателя М2 и генератора G1 до значения, равного пуско-
вому.
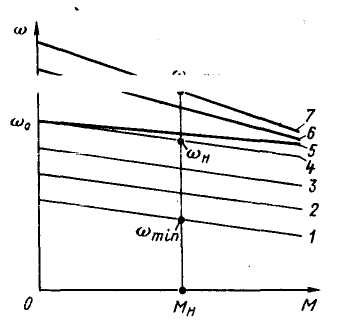
Рис. 9.4. Механические характеристики исполнительного двигателя
в системе генератор – двигатель: 4 – естественная; 3, 2 и 1 – искусственные, полученные уменьшение напряжения на обмотке якоря М2; 5, 6 и 7 –искусствен-
ные, полученные ослаблением магнитного потока М2
Кроме того, такое увеличение тока приводит к увеличению нагрузки на приводной двигатель генератора. Это особенно опасно, если генератор G1 приводится во вращение дизелем. Как известно, дизели крайне чувствительны к перегрузкам ( не более 10% мощ-
ности в течение 1 часа ).
Поэтому на судах применяют систему Г-Д с противокомпаундным генератором. Она отличается от системы Г-Д в чистом виде тем, что генератор, помимо независимой обмотки возбуждения L1 G1, снабжен еще одной обмоткой возбуждения – противоком-
паундной обмоткой L2 G1, включенной последовательно в цепь якоря G1 и выполняющей функции жесткой обратной связи по току ( на рис. 9.3 место включения обмотки L2G1 по
казана при помощи стрелок, т.е. последовательно в цепь главного тока ).
Ее намагничивающая сила F  направлена встречно намагничивающей силе F
направлена встречно намагничивающей силе F  об-
об-
мотки независимого возбуждения L1 G1, т. е. она действует на генератор размагничиваю-
ще.
Общий магнитный поток возбуждения генератора создается разностью намагничи-
вающих сил обеих обмоток.
При нормальной нагрузке намагничивающая сила обмотки L1 G1 значительно боль
ше, чем обмотки L2 G1, и генератор развивает ЭДС, как в обычной системе Г-Д.
При перегрузке разность намагничивающих сил обмоток уменьшается, магнитный поток и ЭДС генератора снижаются, напряжение, подведенное к ЭД, падает, и угловая скорость ЭД становится меньше.
При остановке якоря исполнительного двигателя М2 ЭДС генератора G1 настолько уменьшается, что ток стоянки оказывается в пределах кратковременно допустимого, обыч
но равного ( 2,2…2,5) I  .
.
Система Г-Д обладает исключительно хорошими регулировочными свойствами и позволяет регулировать скорость в пределах 1 : 30. Регулирование получается плавным, так как из-за сравнительно небольших токов возбуждения можно сделать регулировочные резисторы с большим количеством ступеней.
Систему Г – Д применяют в электроприводах мощностью более 75…80 кВт – тя-
желовесных лебедках и кранах, брашпилях, а также на судах с ГЭУ для привода гребного винта.
Существенный недостаток системы Г - Д – большое количество установленных эле
ктрических машин.
Развитие полупроводниковой техники позволило перейти от рассмотренной систе-
мы Г – Д к т.н. системам «управляемый вентильный преобразователь – двигатель», или, сокращенно, системам УВП – Д ( рис. 9.5 ).
2.3. Регулирование скорости в системе двойного рода тока ( УВП – Д )
В таких системах исполнительный двигатель постоянного тока получает питание от судовой сети через управляемый вентильный преобразователь ВП ( рис. 9.5 ).
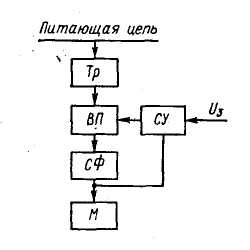
Рис. 9.5. Структурная схема тиристорного электропривода постоянного тока
В качестве вентилей используются управляемые полупроводниковые диоды – тиристоры.
В общем случае такой электропривод состоит из следующих основных элементов:
1. силовой трансформатор Тр;
2. вентильный преобразователь ВП;
3. сглаживающий фильтр СФ;
4. электродвигатель М;
5. система управления СУ.
Силовой трансформатор Тр служит для согласования номинального напряжения двигателя с выходным напряжением преобразователя.
Вентильный преобразователь выпрямляет напряжение и регулирует его в нужных
пределах. Для питания цепей якоря двигателя применяют однополупериодные схемы с нулевым выводом ( рис. 9.6, а ) или двухполупериодные мостовые схемы ( рис.9.6., б ).
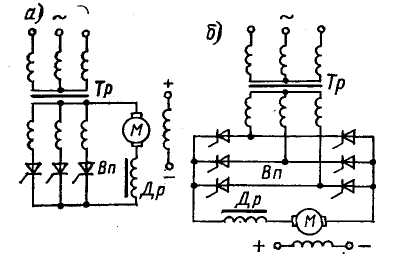
Рис. 9.6. Схемы включения якоря двигателей постоянного тока на вентильный преобразователь: с нулевым выводом ( а ); мостовая ( б )
В таких схемах обмотки возбуждения двигателей обычно получают питание от об-
щей сети переменного тока через маломощные однофазные выпрямители.
Сглаживающий фильтр ( дроссель Др на рис.9.6 ) предназначен для уменьшения пульсаций выпрямленного напряжения. При этом улучшаются условия коммутации и уменьшается нагрев обмотки якоря двигателя.
Система управления СУ изменяет угол отпирания тиристоров α. Вследствие чего изменяется выпрямленное напряжение на якоре исполнительного двигателя, а значит, и его скорость
При этом, при малых скоростях якоря этот угол близок к 90º, а для разгона якоря
СУ непрерывно уменьшает этот угол. При номинальном ( наибольшем ) напряжении на якоре угол α = 0º. 
Механические характеристики двигателя при разных значениях угла отпирания тиристоров α приведены на рис. 9.7.
Они подобны механическим характеристикам исполнительного двигателя в систе-
ме Г – Д ( рис. 9.4 ).
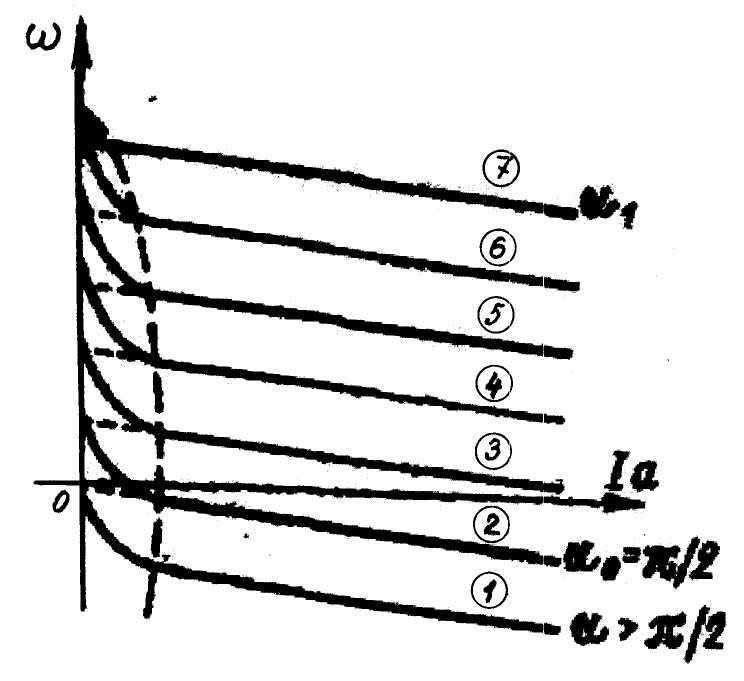
Рис. 9.7. Электромеханические характеристики двигателя при разных значениях угла α
На рис. 9.7 штриховой линией показана граница между режимами непрерывного
( справа от пунктирной линии ) и прерывистого ( слева от этой линии ) токов якоря двига-
теля.
Электромеханические характеристики имеют такие особенности:
1. при уменьшении угла отпирания тиристоров от α = π / 2 = 90º ( характеристика
2 ) до α  = 0º ( характеристика 7 ) скорость двигателя увеличивается, двигатель работает в двигательном режиме;
= 0º ( характеристика 7 ) скорость двигателя увеличивается, двигатель работает в двигательном режиме;
2. при увеличении угла α свыше 90º ( характеристика 1 ) ток якоря двигателя не
изменяет направление, но двигатель реверсирует и переходит в режим тормозного спуска.
при котором электромагнитный момент двигателя, направленный на подъем, ограничива-
ет скорость спуска тяжелого груза или судового якоря с якорь-цепью.
Дата: 2019-02-02, просмотров: 459.