Одним из основных технических средств, позволяющих автоматизировать работу бригады, обслуживающей навигационное оборудование, является автоматизированный обстановочный комплекс (АОК).
Автоматизированный обстановочный комплекс представляет собой объединенную в единую систему совокупность технических (аппаратных) и программных средств, необходимых для автоматизированного сбора и обработки навигационной и гидрографической информации при производстве путевых работ на ВВП в целях контроля состояния судовых ходов и их навигационного ограждения в интересах обеспечения безопасности плавания на ВВП и корректуры электронных навигационных карт.
АОК, как составная часть системы современных информационных технологий на ВВП, должен являться основным средством сбора достоверной навигационно–гидрографической информации для выработки регулярных обновлений электронных навигационных карт – основы функционирования информационных систем (СОЭНКИ, СУДС, АИС, РИС и т.д.) для обеспечения безопасности плавания на ВВП.
Автоматизированный обстановочный комплекс включает в свой состав высокоточный ГЛОНАСС/GPS приемник, приемник дифференциальных поправок от контрольно–коррекитрующих станций, гидрографический эхолот, а также аппаратный блок обработки данных (рис. 3.58).
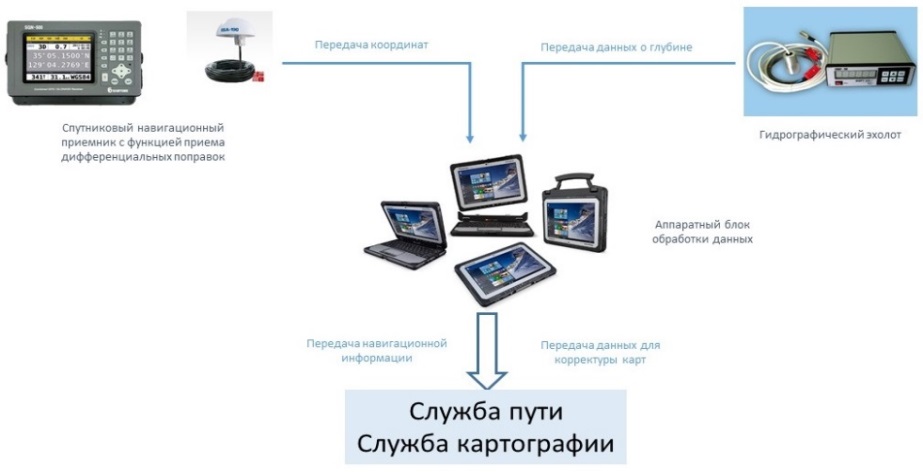
Рисунок 3.58 – Структурная схема сбора навигационной информации с использованием АОК
На практике в качестве аппаратного блока для обработки данных жлательно использовать ноутбук или планшет в защищенном исполнении с классом защиты не ниже IP68, что обусловлено областью его применения, однако в данный момент используют оборудование с более низким классом защиты. Приемник дифференциальных поправок обычно встроен непосредственно в спутниковый навигационный приемник.
Аппаратно – программные средства АОК должны обеспечивать проведение полного цикла мероприятий при производстве путевых работ на участке водной акватории, в том числе:
– проектирование путевых работ;
– расстановка плавучего навигационного ограждения в точки с заданными координатами;
– контроль местоположения плавучего навигационного ограждения;
– использование механизма отображения электронных навигационных карт ВВП;
– передача координат устанавливаемого навигационного ограждения по каналу связи в службу пути;
– передача откорректированного навигационного слоя ЭНК в картографическую службу;
– составление отчетных документов выполненных путевых работ.
Функционирование АОК осуществляется на основе применения спутниковых технологий высокоточного местоопределения с использованием методов дифференциальной коррекции, гидроакустических средств измерения глубин и автоматизированной системы сбора, регистрации и цифровой обработки навигационно–гидрографической информации в реальном масштабе времени, в том числе:
– результатов высокоточного спутникового позиционирования и плановой привязки стационарных и подвижных объектов;
– результатов гидроакустической съемки рельефа дна.
Технология путевых работ с использованием АОК обеспечивает следующее преимущества перед традиционными (ручными) методами выполнения работ:
– оперативность предоставления навигационной и гидрографической пространственной информации для всех пользователей с целью решения ряда задач: управления внутренним водным транспортом; обеспечения безопасности судоходства; проектирования; строительства и эксплуатации различных видов гидросооружений; информационного обслуживания организаций и судоводителей;
– высокую производительность выполнения всего комплекса путевых работ на требуемом уровне качества;
– единство представления цифровых данных, исключающих дублирование информации о навигационных и гидрографических объектах ВВП, а также установленных единых правил пользования этими данными;
– полноту описания и достоверность информации об навигационных и гидрографических объектах ВВП;
– общедоступность информации для всех заинтересованных пользователей.
АОК являются составной частью системы навигационно–гидрографического и картографического обеспечения ВВП (судоходных рек, каналов, водохранилищ, озер и устьевых участков) в зонах ответственности администраций бассейнов водных путей.
Требования к технологии путевых работ, выполняемых структурными подразделениями администраций бассейнов и техническому персоналу, обслуживающему АОК, определяются соответствующими нормативными документами.
АОК объединяет в единую структуру все входящие в состав технические и программные средства, необходимые для сбора и обработки навигационной и гидрографической информации при производстве путевых работ на ВВП.
Обычно АОК представляет собой многофункциональный комплекс с гибкой конфигурацией, которая может быть меняться по желанию потребителя. В зависимости от навигационно–гидрографических особенностей акваторий, решаемых задач и технических требований к производству путевых работ комплектация аппаратно – программных средств АОК может изменяться.
Средства АОК могут быть условно объединены в следующие группы:
– вычислительные средства (специализированные ЭВМ, персональные компьютеры (ПК), карманные персональные компьютеры (КПК) с общесистемным и специальным программным обеспечением);
– навигационная аппаратура потребителя (приемник сигналов ГНСС ГЛОНАСС\GPS, приемник корректирующей информации ГНСС ГЛОНАСС\GPS);
– средства гидрографического назначения (активная гидроакустическая станция);
– средства приема и передачи данных (радиостанции, модемы, приемники корректирующей информации);
– средства печати (графопостроители).
Непосредственное управление работой комплекса при проведении путевых работ осуществляется оператором, который управляет процессом выполнения работ, контролирует качество информации, поступающей от датчиков, и принимает решение по выбору и изменению режима работы. Принимаемая в реальном времени навигационная и гидрографическая информация привязана ко времени от системного таймера и регистрируется на жестком диске в виде массива данных, содержащего информацию о глубинах и координатах.
С целью оперативного контроля над качеством проведения работ, а также выработки рекомендаций оператору и рулевому по управлению движением обстановочного судна, принимаемая информация должна проходить первичную обработку.
Решение задач вождения судна по заданному маршруту, отображение эхограммы, запись траектории движения судна и глубин на траектории осуществляются с помощью программного комплекса сбора и обработки навигационной и гидрографической информации на основе электронных навигационных карт (ЭНК).
Результаты первичной обработки навигационных и гидрографических данных передаваются для отображения на дисплей оператора.
Используемый выходной формат цифровых данных ПО обеспечивает возможность их загрузки в ПО для камеральной обработки навигационно–гидрографической информации.
В настоящее время на ВВП России наибоьлшее распространение приобрели два вида АОК:
– судовой обстановочный комплекс (СОК) производства АО «Кронштадт Технологии;
– мобильный обстановочный комплекс (МОК) производства ООО «Морис».
На рисунке 3.59 представлено изображение СОК.

Рисунок 3.59 – Судовой обстановочный комплекс производства АО «Кронштадт Технологии»
СОК функционирует на базе программного комплекса «Дельта–О». Данный программный комплекс решает следующие основные задачи:
– управление режимом работы СОК;
– графическое и табличное представление предварительного плана путевых работ на средствах отображения комплекса;
– автоматический прием и регистрация информации от судовых датчиков;
– контроль правильности работы комплекса в процессе работы;
– отображение ЭНК ВВП на экране монитора;
– создание БД на средства ограждения в районе работ;
– просмотр и экспорт данных в геоцентрических, геодезических, государственных и местных плановых системах координат;
– автоматическое сохранение полученных результатов путевых работ для использования их при камеральной обработке данных, полученных автоматизированными промерно–изыскательскими комплексами;
– отображение результатов путевых работ (расстановки навигационного ограждения с помощью ГЛОНАСС/GPS оборудования) на отчетных планшетах русловых съемок на бумажной основе и в виде цифровых данных для изготовления ЭНК ВВП;
– обработка, сохранение и передача накопленной информации для получения отчетных материалов выполненных путевых работ;
– прием и сохранение информации от смежных систем ориентации;
– подготовка цифровых данных для изготовления и корректуры ЭНК в стандарте S–57 в соответствии с РД–152–012–01.
Образец МОК представлен на рисунке 3.60.

Рисунок 3.60 – Мобильный обстановочный комплекс
производства ООО «Морис» на теплоходе «Орел» Невско–Ладожского РВПиС ФБУ «Администрация «Волго–Балт»
МОК функционирует на базе программного обеспечения «Лоциус» и решает следующие основные задачи:
– создание и редактирование базы данных районов проведения работ;
– ввод параметров размерения судна (длина, ширина, осадка, положение антенны приемника СНС и антенны эхолота);
– ввод поправки за углубление и тарирование эхолота;
– ввод поправки за уровень;
– настройка параметров проведения гидрографических работ;
– настройка параметров записи данных с датчиков навигационной информации (эхолот, приемник СНС, компас);
– создание базы данных плавучего навигационного ограждения на район работ;
– планирование маршрута графическим способом на электронной карте;
– регистрацию навигационной и гидроакустической информации;
– фиксация места установки СНО;
– создание отчета по результатам установки СНО в табличном виде;
– отображение на экране монитора электронной навигационной карты (при наличии ЭНК данного района);
– отображение навигационной и гидроакустической информации на экране монитора;
– отображение профиля глубин с возможностью выбора масштаба отображения, задание максимальной и минимальной глубины отображения и автоматического масштабирования;
– отображение положения судна на ЭНК и цифровую индикацию расстояния и рекомендованного курса до планируемого места установки СНО;
– автоматический старт гидрографических работ при включении компьютера;
– отправка данных по электронной почте.
Типовая схема подключения МОК на борту судна приведена на рисунке 3.61.
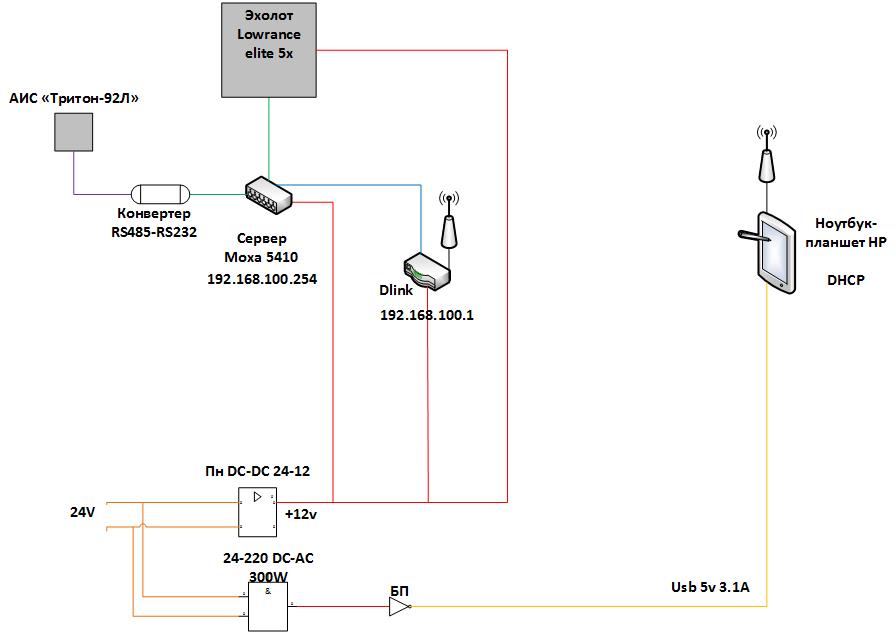
Рис. 3.61 – Типовая схема подключения МОК на борту
обстановочного судна
Проведем сранение СОК и МОК, сведя технические характеристики в единую таблицу.
Таблица 3.5 – Сравнение технических характеристик обстановочных комплексов
| Параметр | Значение СОК | Значение МОК |
| ГНСС | ГЛОНАСС/GPS | ГЛОНАСС/GPS |
| Размещение ГНСС | Внешний приемник | Встроенный приемник |
| Прием диффпоправок | От ККС | Отсутствует |
| Наличие СНС–компаса | Опционально, по требованию заказчика | Отсутствует |
| Среденеквадратическая погрешность определения координат | 1,5 м | Нет данных |
| Диапазон измеряемых глубин | от 0,4 м до 50 м | от 1 м до 305 м |
| Диагональ дисплея ноутбука | 15 дюймов | 10 дюймов |
| Питание | постоянный ток 12 В или 24 В; переменный ток 220 В с частотой 50 Гц | постоянный ток 11–15 В или 22–30 В; переменный ток 200–240 В с частотой 50 Гц; |
| Класс защиты | Отсутствует | IP22 |
В таблице 3.6 представлены результаты сравнительного анализа рассмотренных образцов, относящихся к классу автоматизированных обстановочных комплексов, приведены достоинства и недостатки каждого из них.
Таблица 3.6 – Сравнительный анализ различных типов АОК
| Тип АОК | Достоинства | Недостатки |
| Судовой обстановочный комплекс | внешний навигационный приемник с функцией приема дифпоправок; большое разнообразие функций | габаритные размеры; сложность в настройке и использовании; |
| Мобильный обстановочный комплекс | габаритные размеры; простота настройки и использования; эхолот более высокого класса; более высокий класс защиты | худшая точность местоопределения и отсутствие приемника дифпоправок; меньшее количество встроенных функций |
Таким образом, можно сделать вывод, что при выборе конкретного автоматизированного обстановочного комплекса необходимо учитывать ососбенности водных путей, на которых планируется его применение, специфику конструкции существующего технического флота, ценовой диапазон, а также уровень квалификации обслуживающего персонала.
ГЛАВА 4. ИНФОРМАЦИОННОЕ ОБЕСПЕЧЕНИЕ СУДОХОДСТВА НА ВНУТРЕННИХ ВОДНЫХ ПУТЯХ
Дата: 2019-02-02, просмотров: 889.