Для определения силы, передаваемой через неподвижные или подвиж-ные стыки пар сопрягаемых деталей, могут быть использованы малогаба-
29
малогабаритные ДУ. Например, для САдУ черновой обработкой на стан-ках токарного типа ДУ (рис. 19) выполнен в виде болта, в корпусе 3 кото-рого расположены стержень 12, упругая разрезная втулка 5 (из стали 65Г) и шарик 4. Осевая фиксация стержня и регулирование предварительного сжатия втулки 5 осуществляют гайкой 10. Внутри втулки неподвижно зак-реплен консольный элемент 8 с тензометрическим датчиком. В консоль элемента 8 упирается винт 6, служащий для регулирования его предвари-тельного прогиба.
 Рис. 19. Малогабаритный динамометрический узел
для САдУ точением
на токарных станках
Рис. 19. Малогабаритный динамометрический узел
для САдУ точением
на токарных станках
| Электрические сигналы с этого элемента снимаются через разъем 2. ДУ устанавливают в резцедержатель 11 вместо одного из болтов крепле-ния резца 9. Предварительной тари-ровкой ДУ установлена зависи-мость между осевой силой Р0 и де-формацией yВ = f ( P0) втулки 5, а так-же прогибом yГ.Э элемента 8, элек-трические сигналы с которого пос-тупают в УПУ 1. По контрольному прибору последнего можно судить о значении и отклонениях P0. При обработке под действием составляющей Pz происходит дефор-мирование резца в плоскости дейст-вия этой силы. В результате прогиба резца или деформирования в стыке между ним и резцедержателем стер-жень перемещается, так как корпус ДУ жестко закреплен гайкой 7. |
Вследствие этого изменяются величины уВ, yГ.Э. Устройство 1 фиксирует это отклонение.
Конструктивные параметры ДУ могут изменяться в зависимости от мес-та его установки, значения и направления действующих на устройство сил. Малогабаритное ДУ, предназначенное для встраивания в стыки пар сопря-гаемых деталей, показано на рис. 20. ДУ состоит из стального (сталь 65Г) упругого корпуса 2, обладающего высокой жесткостью и имеющего сквоз-ной паз. В нем на текстолитовой прокладке 6 неподвижно закреплена раз-
30
жимная планка 4, которая стянута винтом 5 и жестко крепит гетероэпитак-сиальный элемент 3, выполненный в виде камертона, со свободной кон-солью которого контактирует регулировочный винт 10, выполненный из диэлектрика. Винтом создается предварительный натяг элемента 3. Подвод питания и съем сигналов с элемента 3, поступающих в УПУ (9), осущест-вляется через разъем 8. Кожух 1 закрывает измерительную часть ДУ. Два штифта 11 служат ограничителями прогиба корпуса 2 и исключают его поломку. На нижнюю часть корпуса напылен слой 7 твердосплавного ма-териала, обладающего высокой износостойкостью.
Пример использования ДУ показан на рис. 21. Устройства 1 – 3, 5 и 7 устанавливают в пазы, выполненные в направляющих стола 6 станка по правилу шести точек. Стол в процессе обработки имеет поступательное движение относительно станины 8. Глубина каждого паза такая, чтобы корпус ДУ был предварительно деформирован на определенную величину.
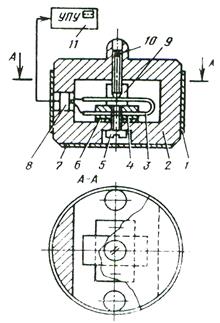
Рис. 20. Динамометрическое устройство для измерения деформации в стыках | 
Рис. 21. Схема расположения динамометрических устройств в стыке между направляющими стола и станины станка | ||||||||||||||||||||||||||
Под действием сил и моментов, возникающих в технологической сис-теме при резании, происходит деформирование стыков и стол изменяет свое первоначальное положение. В результате деформации корпусов ДУ изменяются пропорционально перемещению точки, в которой они установ-
31
лены. Сигналы с упругочувствительных элементов 3, возникающие в результате деформирования и пропорциональные ей, поступают в УПУ 4, где сравниваются и суммируются по определенному алгоритму. УПУ выдает информацию о пространственном положении стола в любой момент времени.
Дата: 2018-12-28, просмотров: 391.