Протеканию любого технологического процесса во времени в реальных условиях сопутствует действие множества факторов, влияющих на его ход и имеющих чаще всего случайный характер. Детерминировать процесс та-ким образом, чтобы все факторы в любой момент времени были бы зара-нее учтены, невозможно. Учет возникающих ситуаций с целью воздейст-вия на процесс таким образом, чтобы его ход отвечал задачам, которые ре-шает этот процесс, возможен только путем управления за счет оперативно-го вмешательства в процесс каждый раз, когда появляются тенденции к от-клонению или сами отклонения в ходе протекания процесса.
В решении задач данного типа использу ют так называемые системы адаптивного управления.
| Структурная схема САдУ представлена на рис. 15. Информация о состоянии объекта управле-ния (ОУ) получается посредством первичного преобразователя (ПП) (датчика), предназначенного для преобразования контролируемой величины, характеризующей про-текание процесса в ОУ, в некото- |
Рис. 15. Структурная схема САдУ
|
рую физическую величину, удобную для последующих преобразований и управления.
Протекание процесса в ОУ подвержено влиянию целого ряда факторов, изменяющихся по известным и случайным законам. Совокупное действие этих факторов (на рисунке оно показано как некоторая величина Ω) при-водит к отклонениям процесса от заданного. Рассмотрим технологическую систему, в которой, например, нужно поддерживать в определенных пре-делах постоянство силы резания Р при действии возмущающего фактора z – припуска на обработку. Если изменения z невелики, то характеристика P = f ( z ) может быть линеаризована, а зависимость Р от подачи S и z пред-ставляется как P = kSz , где k – передаточный коэффициент.
23
Если среднее значение припуска равно z0 и назначен режим обработки с постоянной подачей S0, номинальная сила резания равна Р0. При разомк-нутой системе для обеспечения необходимой подачи на входе усилителя У2 действует напряжение u1, а подача S0 = k2k3u1, где k2, k3 – соответствен-но передаточные коэффициенты усилителя У2 и исполнительного устрой-ства ИУ. Так как текущее значение припуска может отличаться от номи-нального на величину Δz, то фактическое значение z = z0 ± Δz. В результате фактическая сила резания Р' = kS0 ( z0 ± Δz ) отличается от номинальной P0 = kS0z0 и отклонение силы резания от заданного значения составляет ± P ' = kS0Δz.
В замкнутой САдУ из-за наличия отрицательной обратной связи при отклонении ±Δz припуска от заданного значения фактическая сила резания Р"= k ( S0  ΔS )( z0 ± Δz ), так как фактическое значение подачи S " = ( S0
ΔS )( z0 ± Δz ), так как фактическое значение подачи S " = ( S0  ΔS ) и z = z0+Δz , где ΔS – изменение подачи для компенсации влияния на си-лу резания отклонения ±Δz припуска. Таким образом,
ΔS ) и z = z0+Δz , где ΔS – изменение подачи для компенсации влияния на си-лу резания отклонения ±Δz припуска. Таким образом,
P " = kS0z0 ± kS0Δz kΔS ( z0 ± Δz ), (1)
а отклонение силы резания от заданного значения
±ΔP " = kS0Δz kΔS ( z0 ± Δz ). (2)
Отношение силы резания, полученное при управлении с САдУ и при его отсутствии,
 (3)
(3)
Отсюда следует, что ΔP " < ΔP ', так как 1 – ΔS / S (1 + 0,5 z0) < 1, и они отличаются тем больше, чем значительнее изменяется величина S (при ΔS = О, ξ = 1). Сравнительную оценку статических ошибок можно выпол-нить, используя передаточные коэффициенты:
ξ = ΔP "/ΔP ' = 1/(1+ k0), (4)
где k 0 = k1k2k3k4k5 – передаточный коэффициент разомкнутой системы.
При обработке на металлорежущих станках стабилизация Р означает стабилизацию yi . Таким образом, чем меньше диапазон изменения силы Р при одних и тех же вариациях, тем с большей точностью выполняется об-работка. В статических САдУ отклонения ΔP от некоторого заданного зна-
24
чения неизбежны, причем величины P тем больше, чем значительнее изме-нения z . Таким образом, при использовании этих САдУ происходит неко-торое «копирование» припуска z . Копирование погрешностей заготовки будут тем меньше, чем больше k0, а следовательно, тем больше и присущая САдУ статическая ошибка.
Случайный характер возмущений и постоянное изменение их значений во времени приводит к тому, что САдУ постоянно работает в неустановив-шемся режиме. Наличие в САдУ инерционных устройств вызывает запаз-дывание процесса перехода системы из одного состояния в другое даже при скачкообразном возмущении. Характер переходного процесса может быть различным и зависит от динамических свойств всех устройств, вхо-дящих в САдУ (в том числе и объекта управления). Динамические свойст-ва САдУ оценивают по реакции системы на единичную функцию, по зако-ну которой, как полагают, изменяется входная величина (входная коорди-ната). Выходная величина (выходная координата) для систем с различны-ми динамическими свойствами при этом может меняться по различным за-конам во времени. На рис. 16 представлены возможные виды переходных процессов для линеаризованных устойчивых систем.
| Классификация САдУ металло-обработкой СадУ механической обработкой можно строить на основе различных информационных признаков и струк-тур управления. В общем случае воз-можные пути построения САдУ пока-заны на рис. 17. Целями управле-ния при использовании САдУ могут быть повышение точности обработки, ее производительности, улучшение па-раметров шероховатости обрабатывае-мой поверхности, повышение произ-водительности обработки, обеспече-ние надежности работы станка, макси-мальное использование его технологи-ческих возможностей, а также режу-щего инструмента, электропривода, | 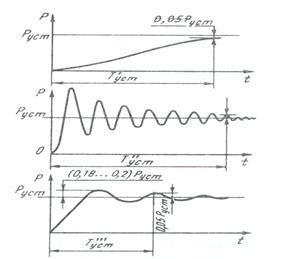
|
предохранение режущего инструмента от поломок и др. Число САдУ определяется одним из перечисленных факторов или их совокупностью.
25















Рис. 17. Классификация САдУ металлообработкой
26
К режиму обработки часто предъявляют противоречивые требования. Как правило, невозможно получить решение, одновременно удовлетворяющее всем требованиям. В этом случае ищут компромиссное решение. Управ-ление процессом обработки осуществляют путем изменения управляющих воздействий: скорости привода главного движения привода и подачи, по-ложения режущего инструмента относительно технологических баз де-тали.
Текущую информацию о режиме обработки, состоянии технологичес-кой системы и выработке сигналов управления, соответствующих приня-той стратегии управления, получают с помощью контроля ряда парамет-ров. Для формирования сигналов, пропорциональных этим параметрам, САдУ должна быть снабжена датчиками текущей информации. Их число определяется назначением САдУ, количеством управляющих воздействий и поставленной целью управления; оно может быть различным.
Выбор источников информации
Дата: 2018-12-28, просмотров: 386.