С учетом квантования по времени. Дискретные
Передаточные функции: непрерывной части системы
С учетом экстраполятора нулевого порядка, цифровых
Регуляторов и замкнутого электропривода в целом
Структурная схема цифро - аналоговой следящего СПР положения с учетом процесса квантования сигналов по времени приведена на рис. 5. В цифро-аналоговой СПР ЦАП выполняет функцию экстраполятора нулевого порядка
При переходе к z-преобразованиям структурная схема СПР с учетом дискретных передаточных функций принимает вид, приведенный на рис. 10
|

|

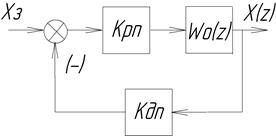
Рис. 10. Структурная схема СПР при переходе к дискретным
передаточным функциям
Дискретная передаточная функция непрерывной части системы с учётом экстраполятора нулевого порядка:

где  период дискретизации;
период дискретизации;  .
.
Разлагая выражение в фигурных скобках на сумму элементарных дробей и переходя к  -преобразованиям по таблицам получим:
-преобразованиям по таблицам получим:
 ,
,
где  ;
;
 ;
;
 ;
;  ;
;
 ;
; 


Следовательно,

Дискретная передаточная функция замкнутой СПР положения
 ;
;
 .
.
Передаточная функция позволяет исследовать динамические характеристики цифро - аналоговой СПР положения с учетом процесса квантования по времени.
Расчет параметров корректирующего устройства
По управляющему воздействию для компенсации
Динамических ошибок слежения.
Для компенсации динамических ошибок слежения используется корректирующее устройство представляющее собой дифференцирующее звено вида:
 .
.
Следовательно,
 .
.
8. Пример расчета следящего структурно-минимального электропривода (четные варианты)
Исходные данные для расчета
Исходными данными для расчета являются: диаграмма (рис. 2) изменения во времени статической силы FС нагрузки; масса m перемещаемого узла; шаг h и к. п. д. h1 передачи «винт - гайка»; передаточное отношение i и к. п. д. h2 редуктора; момент инерции JВ винта; максимальная VMAX скорость перемещения подвижного узла; постоянная времени Tсп силового преобразователя; коэффициент kдп передачи датчика положения.
| № вар. | F1, кН | F2, кН | F3, кН | t1, мин. | t2, мин. | t3, мин. | m, кг |
| 20 | 30 | 110 | 70 | 20 | 10 | 20 | 600 |
| h, мм/об | h1 | i | h2 | JВ, кгм2 | VMAX, м/мин | Tсп,
 с с
| kдп |
| 10 | 0.97 | 2 | 0.93 | 0.005 | 2.5 | 0 | 1 |
Энергетический расчет, выбор типа
Электродвигателя
Для выбора типа электродвигателя приведем силы, действующие на исполнительный механизм к валу электродвигателя, по формуле:
 , где
, где  м/рад
м/рад
 Нм
Нм
 Нм
Нм
 Нм
Нм
Скорость на валу электродвигателя, соответствующая максимальной скорости движения исполнительного механизма:
 рад/с.
рад/с.
 об/мин.
об/мин.
Выбор электродвигателя будем производить методом эквивалентного момента.
 Нм
Нм
По эквивалентному моменту и максимальной скорости выбираем двигатель типа ПБВ160М со следующими техническими характеристиками:
Мн=76,4Нм
Мmax=490Нм
Iн=78,5А
nн=500об/мин
Pн=4кВт
nmax=1000об/мин
Uн=66В
Jн=0,242кг*м2
Тя=0,0106с
Тм=0,0085с
Проверим двигатель на перегрузочную способность. При этом должно выполняться соотношение:
 .
.
490³97,55+0,242*500
490Нм³218,55Нм
Следовательно, двигатель по перегрузочной способности проходит.
Дата: 2018-12-28, просмотров: 415.