Цель работы — ознакомиться с назначением и основными типами захватных устройств (ЗУ) роботов, свойствами кинематики схвата представленного промышленного робота, определить среднее отклонение позиционирования робота «Омега» в направлении Z, X, Y.
Содержание работы:
1. Изучение кинематики захватного устройства робота.
2.Изучение методики расчета среднего отклонения позиционирования робота «Омега» в направлении Z, X, Y.
3. Написание управляющей программы (УП).
Порядок выполнения работы:
1. Изучить устройство схвата. Изучить кинематику схвата робота.
2. Измерить параметры схвата, данные измерений занести в таблицу
3. Собрать измерительную установку.
4. Написать управляющую программу (УП).
5. Произвести многократные измерения.
6. Занести данные измерений в таблицы.
7. Посчитать среднее отклонение позиционирования, размах отклонений, среднее квадратическое отклонение.
8. Сделать вывод о полученных знаниях и навыках
9. Ответить на контрольные вопросы
ЗУ промышленных роботов и манипуляторов (М) служат для захватывания и удержания в определенном положении объектов манипулирования. Эти объекты могут иметь различные размеры, форму, массу и обладать разнообразными физическими свойствами, что требует применения ЗУ разного характера
Механическими называются захватные устройства, в которых удерживание объекта осуществляется под действием реакций в точках (зонах) контакта с рабочими элементами, создаваемых двигателем или собственным весом объекта. Механические захватные устройства разделяются на схваты и поддерживающие захватные устройства. Cхватом называется механическое захватное устройство, представляющее собой механизм, удерживающий объект посредством зажима рабочими элементами при их перемещении двигателем. Поддерживающими называются механические захватные устройства, не имеющие подвижных звеньев и представляющие собой опоры, на которых объект удерживается под действием сил тяжести (ковши для захватывания, транспортировки и разливки жидкого металла, крюки, штыри, призматические опорные элементы, лопатки и пр.). Вакуумными называются захватные устройства, удерживающие объект посредством разрежения воздуха в замкнутой полости рабочего элемента — присоски. Различают активные вакуумные захватные устройства, в которых разрежение воздуха создается принудительно с помощью вакуумных насосов или эжекционных устройств, и пассивные, в которых разрежение воздуха создается за счет его вытеснения при деформировании рабочих элементов. Магнитными называются захватные устройства, удерживающие объект при действии магнитных сил, создаваемых постоянным магнитом или электромагнитом.
В представленном роботе рассмотрим механический схват, имеющий привод от шагового двигателя (рис.1)
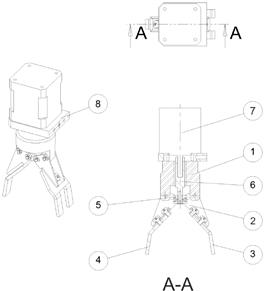
Рис. 1 Схват робота ОМЕГА
Основным узлом схвата является вилка 1, которая является корпусом схвата. На вилке закрепляется фланец 8, посредством которого в дальнейшем схват устанавливается на роботе. Вилка имеет отверстия для двух осей, на которых на одном из углов шарнирно вращаются треугольные рычаги 2. На рычагах установлены сходящиеся губки 4 и 2. Возможны различные варианты губок. На вторых углах рычагов также расположены отверстия для осей, которые в свою очередь входят в пазы бронзовой ходовой гайки 5. Гайка 5 имеет резьбовое отверстие по центру, в которое вкручен винт 6, который в свою очередь жестко и концентрично соединен с валом шагового двигателя 7.
При включении шагового двигателя 7 по или против часовой стрелки, винт 6 начинает вворачиваться или выворачиваться в ходовую гайку. Внутренние углы треугольных рычагов 2 начинают отдаляться, либо приближаться к двигателю, одновременно при этом губки схвата начинают сходиться, либо расходиться. Кинематическая схема схвата изображена на рис. 2
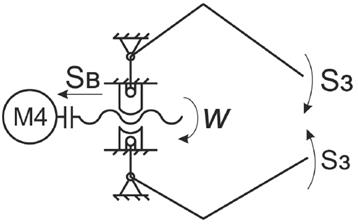
Рис. 2 Кинематическая схема схвата
Позиционирование - это ориентация подвижного рабочего органа робота относительно нулевого положения. В общем случае точность позиционирования - это точность фиксации конца траектории точки схвата. Точность позиционирования является одним из основных показателей точности роботов. Под точностью позиционирования понимается отклонение действительного положения точки рабочего органа от запрограммированного в системе ЧПУ, при его многократном позиционировании в различных точках по пути перемещения по одной из координатных осей. При контроле точности позиционирования применяется статистический метод оценки точности по результатам многократных повторных испытаний. При этом определяются их статистические характеристики. Применение статистического метода оценки точности в данном случае обусловлено тем, что позиционирование рабочего органа робота в данной точке является случайной величиной, зависящей от многих факторов. При этом случайные отклонения соизмеримы с систематическими.
На точность позиционирования оказывают влияние следующие показатели точности робота: геометрическая точность сопряжённых поверхностей и взаимное расположение базовых деталей, люфты в направляющих, осевые и радиальные люфты в приводах, жесткость отдельных узлов и системы в целом, состояние электронной части ЧПУ, и др.
В данной работе рассмотрим точность позиционирования поворотного направления Z, X, Y робота «ОМЕГА».
Заданное положение рабочего органа Zj, Х j , Yj - расчётное положение рабочего органа, в которое он должен переместиться по оси координат, где j=1,2...m порядковый номер заданного положения.
Нулевое положение рабочего органа Z0, X 0, Y 0 - положение рабочего органа, зафиксированное средством измерения относительно какой-либо базовой поверхности или оси другого рабочего органа, несущего инструмент или обрабатываемую деталь и принятое за начало отсчёта по контролируемой оси координат.
Действительное положение рабочего органа Zji, Xji , Yji - положение рабочего органа, установленное при позиционировании и зафиксированное средством измерения, где i=1,2...n порядковый номер измерения.
Отклонение от заданного положения рабочего органа ΔZji,  при i-ом измерении - разность между действительным и заданным положением рабочего органа при проходе в заданное положение:
при i-ом измерении - разность между действительным и заданным положением рабочего органа при проходе в заданное положение:
ΔZji = Zji − Zj
ΔXji = Xji − Xj
ΔYji = Yji – Yj (1).

 Среднее отклонение от заданного положения рабочего органа ΔZj, ΔХj, ΔYj - среднее арифметическое отклонений от заданного положения рабочего органа, полученных по результатам измерений при многократном подходе в заданное положение:
Среднее отклонение от заданного положения рабочего органа ΔZj, ΔХj, ΔYj - среднее арифметическое отклонений от заданного положения рабочего органа, полученных по результатам измерений при многократном подходе в заданное положение:





Размах отклонений от заданного положения рабочего органа Rj - абсолютная наибольшая алгебраическая разность отклонений от заданного положения рабочего органа, полученных по результатам измерений при многократном подходе в заданное положение:
Rj=max ΔZji -min ΔZji
Rj=max ΔXji - min ΔXji
Rj=max ΔYji - min ΔYji (3)
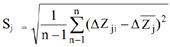
Среднее квадратическое отклонение от заданного положения рабочего органа Sj-вероятностное значение рассеяния отклонений от заданного положения рабочего органа (с вероятностью 0.997), полученных по результатам измерений при многократном подходе в заданное положение. При количестве измерений n= 10 расчёт среднего квадратического отклонения Sj производят по формуле:




Выполнение работы
Дата: 2018-12-21, просмотров: 380.