Цель работы – изучение шагового электропривода, приобретение практических навыков управления роботом и написания программы для транспортировки деталей со склада на стеллаж.
Содержание работы:
1. Изучение шагового электропривода. Виды шаговых двигателей.
2. Определение дискретности перемещений осей робота.
3. Создание последовательности действий робота.
4. Определение координат положений робота при транспортировке.
5. Написание рабочей программы для сборки заданного узла.
Порядок выполнения работы:
1. Изучить шаговый электропривод.
2. Получить индивидуальное задание.
3. Ознакомиться с методикой выполнения работы.
4. Вывести расчетную формулу определяющую параметр дискретности робота для каждой оси, в зависимости (далее по вариантам) от шага винта или коэффициента передачи редуктора. (см. лабораторную работу 1).
5. Определить дискретность перемещения осей робота при помощи оболочки управления роботом на ЭВМ. (по вариантам).
6. Определить координаты положений робота при взятии деталей со склада.
7. Определить координаты конечного положения деталей. Заполнить таблицу координат управляющей программы.
8. Написать текст управляющей программы.
9. Сделать выводы о приобретенных навыках.
10. Ответить на контрольные вопросы.
Как правило, в настольных учебных станках и роботах с ЧПУ класса для перемещения рабочих органов и вспомогательных элементах используют шаговый электропривод. Современные шаговые моторы точны, бесшумны, имею высокий крутящий момент, возможность работы на высоких скоростях вращения, бесшумны. В роботе OMEGA применяются современные шаговые моторы во всех приводах. Далее кратко рассмотрим принципы работы шаговых моторов, принципы управления ими.
Шаговые приводы подач обеспечивают бесступенчатое регулирование скоростей подач в соответствии с заданными в управляющей программе значениями.
1. Шаговый двигатель – это электромеханическое устройство синхронного типа, которое преобразует управляющие электрические импульсы в дискретные механические перемещения (угловые или линейные). Шаговые двигатели относятся к классу бесколлекторных двигателей постоянного тока. Как и любые бесколлекторные двигатели, ШД имеют высокую надежность и большой срок службы. Одним из главных преимуществ шаговых двигателей является возможность осуществлять точное позиционирование и регулировку скорости без обратной связи. Это очень важно, так как датчики обратной связи могут стоить больше самого двигателя. Если нагрузка шагового двигателя превысит его момент, то информация о положении ротора теряется, и система требует базирования с помощью, например, концевого выключателя или другого датчика. Системы с обратной связью не имеют подобного недостатка.
В шаговом двигателе вращающий момент создается магнитными потоками статора и ротора, которые соответствующим образом ориентированы друг относительно друга. Статор изготовлен из материала с высокой магнитной проницаемостью и имеет несколько полюсов. Полюс можно определить, как некоторую область намагниченного тела, где магнитное поле сконцентрировано. Полюса имеют как статор, так и ротор. Для уменьшения потерь на вихревые токи магнитопроводы собраны из отдельных пластин, подобно сердечнику трансформатора. Вращающий момент пропорционален величине магнитного поля, которая пропорциональна току в обмотке и количеству витков. Таким образом, момент зависит от параметров обмоток. Если хотя бы одна обмотка шагового двигателя запитана, ротор принимает определенное положение. Он будет находиться в этом положении до тех пор, пока внешний приложенный момент не превысит некоторого значения, называемого моментом удержания. После этого ротор повернется и будет стараться принять одно из следующих положений равновесия.
Применение шаговых двигателей (ШД) обусловлено тем, что:
угол поворота ротора определяется числом импульсов, которые поданы на двигатель;
двигатель обеспечивает полный момент в режиме остановки (если обмотки запитаны);
обеспечивается прецизионное позиционирование и повторяемость. Шаговые двигатели имеют точность 3-5% от величины шага. Эта ошибка не накапливается от шага к шагу;
имеется возможность быстрого старта/остановки/реверсирования;
обеспечивается высокая надежность, связанная с отсутствием щеток, срок службы шагового двигателя фактически определяется сроком службы подшипников;
имеется однозначная зависимость положения от входных импульсов, что обеспечивает позиционирование без обратной связи;
обеспечивается возможность получения очень низких скоростей вращения для нагрузки, присоединенной непосредственно к валу двигателя без промежуточного редуктора;
может быть перекрыт довольно большой диапазон скоростей, скорость пропорциональна частоте входных импульсов.
Однако ШД имеют следующие недостатки:
шаговым двигателем присуще явление резонанса;
возможна потеря контроля положения ввиду работы без обратной связи;
потребление энергии не уменьшается даже без нагрузки;
затруднена работа на высоких скоростях;
невысокая удельная мощность;
относительно сложная схема управления.
Виды шаговых двигателей:
Существуют три основных типа шаговых двигателей:
двигатели с переменным магнитным сопротивлением,
двигатели с постоянными магнитами,
гибридные двигатели.
Двигатели с переменным магнитным сопротивлением:
Шаговые двигатели с переменным магнитным сопротивлением имеют несколько полюсов на статоре и ротор зубчатой формы из магнитомягкого материала (рис. 1.). Намагниченность ротора отсутствует. Для простоты на рисунке ротор имеет 4 зубца, а статор имеет 6 полюсов. Двигатель имеет 3 независимые обмотки, каждая из которых намотана на двух противоположных полюсах статора. Такой двигатель имеет шаг 30 градусов. При включении тока в одной из катушек, ротор стремится занять положение, когда магнитный поток замкнут, т.е. зубцы ротора будут находиться напротив тех полюсов, на которых находится запитанная обмотка. Если затем выключить эту обмотку и включить следующую, то ротор поменяет положение, снова замкнув своими зубцами магнитный поток. Таким образом, чтобы осуществить непрерывное вращение, нужно включать фазы попеременно. Двигатель не чувствителен к направлению тока в обмотках.
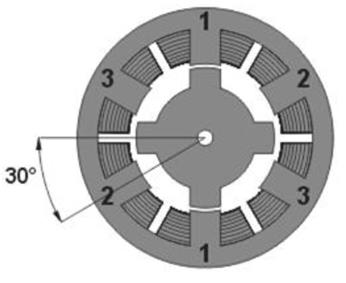
Рис. 1 Двигатель с переменным магнитным сопротивлением
Реальный двигатель может иметь большее количество полюсов статора и большее количество зубцов ротора, что соответствует большему количеству шагов на оборот. Иногда поверхность каждого полюса статора выполняют зубчатой, что вместе с соответствующими зубцами ротора обеспечивает очень маленькое значения угла шага, порядка нескольких градусов. Двигатели с переменным магнитным сопротивлением довольно редко используют в индустриальных применениях.
Дата: 2018-12-21, просмотров: 446.