Цель работы - освоить на практике технологию отладки управляющих программ промышленного робота, получить практические навыки в программировании робота «Омега» в режиме преднабора.
Задание на лабораторную работу:
Переместить детали со склада-стеллажа на ступенчатый стеллаж в порядке, указанном преподавателем, используя режим преднабора.
Наладку и программирование робота следует начинать при остановленном обслуживаемом оборудовании и при отключённом электро и пневмопитании робота. Вначале необходимо задать четкий алгоритм движений робота, где каждая строка будет являться в последующем кадром управляющей программы. Ключевые моменты при этом:
-начало программы
-выход в ноль
-комплекс перемещений
Обычно захват детали соответствует такому алгоритму:
-схват выходит в позицию над деталью. Здесь следует отметитьследующее: поскольку схват имеет губки в виде сходящихся призм, то заготовка с большой долей вероятности забазируется верно. Однако, для достижения наибольшей точности захвата детали, следует подводить губки схвата таким образом, чтобы деталь располагалась как можно более точно в призмах уже на этапе подвода, при этом внутренние углы призм должны двигаться по окружности, максимально совпадающей с центром детали (Рис. 1).
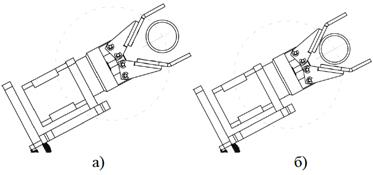
Рис. 1 Положение схвата при взятии заготовки
-раскрыть схват
-опустить схват на требуемую высоту для захвата
-закрыть схват. При необходимости выполнить команду закрытиясхвата дважды
-поднять деталь на требуемую высоту
Когда алгоритм составлен, можно переходить к отработке кадров и положений схвата в ручном режиме. Перед началом определения положений схвата следует вывести робот в крайние положения, проверив таким образом работу робота в крайних положениях, после чего вывести в ноль по всем осям. При выводе в ноль следует учитывать последовательность выхода в ноль робота по осям, а именно:
1.Выход по оси Y
2.Поворот в направлении Z
3.Выход по оси X.
Расположение осей и нолей – Рис. 2.
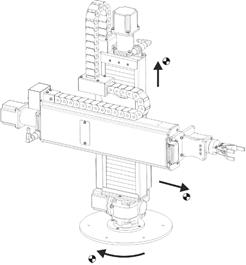
Рис. 2 Расположение нолей робота и направление осей
Когда все предыдущие шаги сделаны, можно непосредственно начать задавать положения точек схвата в рабочем пространстве. При этом следует помнить, что ошибочный ввод значений в команде может привести к неожиданному перемещению схвата в точку, не предусмотренную алгоритмом. Поэтому следует иметь постоянный оперативный доступ к кнопке аварийного останова для предотвращения поломки робота и получения травм.
Настроенный робот включают в автоматической режиме. При неудовлетворительном выполнении каких-либо движений производят их переналадку, чаще с корректировкой циклограммы методами, описанными выше.
Режим преднабора служит для оптимизации процесса программирования и наладки робота, повышении точности движений, повышения безопасности работы с роботом. Обратимся к главному окну программного обеспечения для управления роботом (Рис. 2).
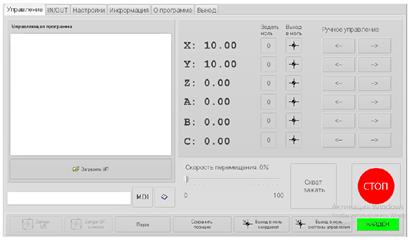
Рис. 2 Главное окно ПО
В левом нижнем углу окна расположена строка для ввода команд,
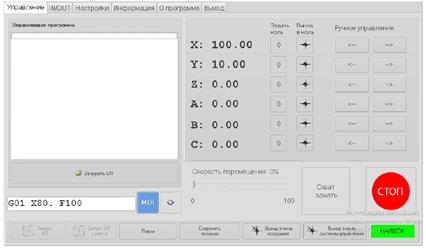
Рис. 3 Строка для ввода команд
Если ввести команду для управления роботом в G-коде в данную строку и нажать кнопку MDI, то робот выполнит эту команду. При этом, если после нажатия данной кнопки, нажать на соседнюю кнопку с «книжкой», то увидим список набранных команд (Рис. 4).
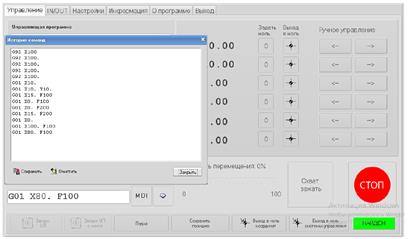
Рис. 4 Список набранных команд
Следует отметить, что если возникнет необходимость повторить какой-либо кадр из ранее набранных, то его можно выбрать двойным нажатием мыши и он отобразится в командной строке (Рис. 5).
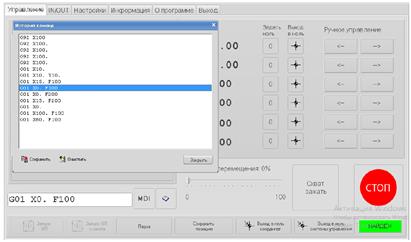
Рис. 5 Список набранных кадров
Данный список кадров можно сохранить в текстовый файл, нажав кнопку «Сохранить».
Для сохранения положений робота и внесения изменений в управляющую программу предусмотрены следующие возможности: в главном окне программы в нижней строке кнопок есть кнопка «Сохранить позицию» (см. рисунок 1). Данная кнопка нажимается, когда робот стоит в нужной пользователю позиции и нужно сохранить данное положения для внесения его в УП. При нажатии кнопки «Сохранить позицию», появляется строка «Сохранить кадр» (Рис. 6).
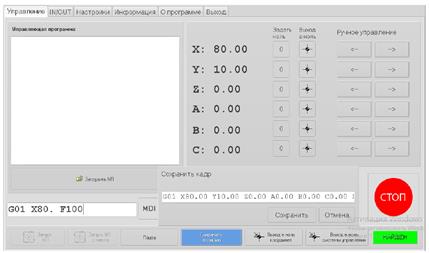
Рис. 6 строка «Сохранить кадр»
При нажатии кнопки «Сохранить» открывается список сохраненных команд (Рис. 7).
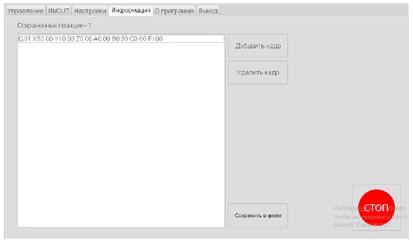
Рис. 7 Список сохранения и редактирования команд
В данном списке можно добавлять или удалять кадры с помощью кнопок «Добавить кадр» и «Удалить кадр», все кадры можно сохранить в файл УП на жестком диске, нажав кнопку «Сохранить в файл» (Рисунок 8).
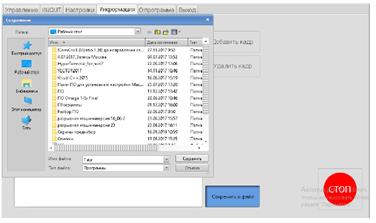
Рис. 8 Сохранение списка кадров в УП
Порядок выполнения работы
1.Изучить устройство робота «Омега».
2.Изучить систему координат робота, направление осей.
3.Научиться составлять алгоритм движения робота
4.Изучить команды для управления роботом
5.Ознакомиться с правилами техники безопасности
6.В соответствии с заданием, выданным преподавателем, составить алгоритм работы робота.
7.Пользуясь режимом преднабора или в ручном режиме, составить управляющую программу
8.Запустить программу в автоматическом режиме, проверить точность наладки.
9. Сохранить УП в файл.
10. В отчете по лабораторной работе привести текст управляющий программы.
11. Сделать вывод о полученных навыках.
12. Ответить на контрольные вопросы.
Контрольные вопросы:
1.Назовите тип двигателя в приводах робота «Омега»
2.Какие особенности имеет процедура захвата детали роботом?
3.В какой системе координат работает робот «Омега»?
4.Какие основные команды реализованы в системе управления роботом?
5.Назовите основные преимущества написания УП в режиме преднабора.
6.Как в программном обеспечении робота «омега» реализован режим преднабора?
7.Как режим преднабора помогает сделать работу с роботом безопаснее?
Лабораторная работа №4
Дата: 2018-12-21, просмотров: 481.