Цель работы – приобретение практических навыков управления роботом и написания программы для сборки с помощью робота определенного заданного узла.
Содержание работы:
1. Создание последовательности действий робота.
2. Определение координат номерных положений робота при сборке.
3. Написание рабочей программы для сборки заданного узла.
Порядок выполнения работы:
1. Получить индивидуальное задание
2. Ознакомиться с методикой выполнения работы
3. Определить координаты положений робота при взятии деталей сосклада и при сборке узла.
4. Заполнить таблицу координат управляющей программы
5. Написать управляющую программу
6. Сделать выводы о приобретенных навыках
1. Получение задания
На рис.1 изображен вид сверху сборочного стенда. Цифрами 1-4обозначены позиции-ячейки на стеллаже сборки готовых узлов. Цифрами I-IV обозначены позиции-ячейки на ступенчатом складе деталей.
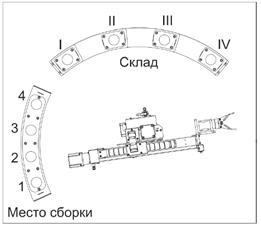
Рис. 1 Схема сборочного стенда
На рис. 2 изображены детали для сборки, имеющие свое буквенное обозначение.
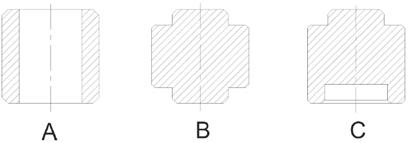
Рис. 2 Обозначение деталей для сборки
На рис. 3 изображены сборочные узлы, которые также имеют буквенное обозначение
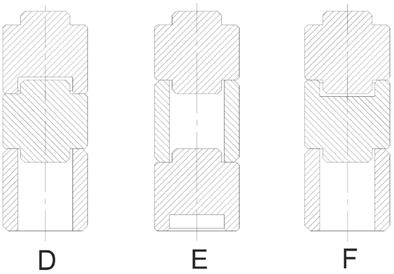
Рис. 3 Сборочные узлы
Вариант задания складывается из варианта склада и варианта места сборки согласно следующим таблицам 1 и 2:
Таблица 1
| Деталь | |||
| Ячейка склада | A | B | C |
| I | |||
| II | * | ||
| III | * | ||
| IV | * | ||
Таблица 2
| Сборочный узел | |||
| Ячейка места сборки | D | E | F |
| 1 | |||
| 2 | |||
| 3 | * | ||
| 4 | |||
Таким образом, пример варианта задания выглядит следующим образом:
III A II B IV C 3 F
Направления осей робота указаны на рис. 4
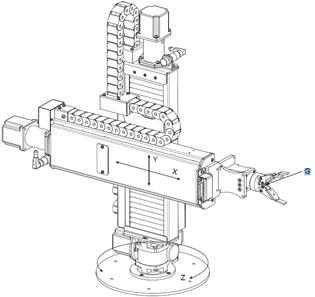
Рис. 4 Направления осей робота
Требуется собрать сборочный узел на стеллаже для сборки из трех деталей, находящихся на складе. При этом в таблицу 3 вносятся координаты каждого промежуточного положения робота и комментарии к каждому действию.
Краткий алгоритм действий:
-включить робот
-вывести робот в «0»
-идти в позицию первой детали
-открыть схват
-опустить схват в позицию на середине детали
-закрыть схват
-поднять деталь
-переместить деталь в заданную позицию сборки
-поставить деталь
-открыть схват
-идти в позицию второй детали
-повторять действия до тех пор, пока узел не будет собран
-вывести робот в «0»
-выключить робот
Действия каждого шага выполняются последовательно с записью каждого положения робота.
Таблица 3
| № | Пояснение | X | Y | Z |
| 1 | ||||
| 2 | ||||
| 3 | ||||
| 4 | ||||
| 5 | ||||
| 6 | ||||
| 7 | ||||
| 8 | ||||
| 9 | ||||
| 10 |
После заполнения Таблицы 3 необходимо привести полный текст управляющей программы робота.
Сделайте выводы о приобретенных навыках.
Контрольные вопросы
1. Назовите тип двигателя в приводах робота «Омега»
2. Какие особенности имеет процедура захвата детали роботом?
3. В какой системе координат работает робот «Омега»?
4. Какие основные команды реализованы в системе управления роботом?
Лабораторная работа № 6
Дата: 2018-12-21, просмотров: 418.