МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ
КИРОВОГРАДСКАЯ ЛЕТНАЯ АКАДЕМИЯ
НАЦИОНАЛЬНОГО АВИАЦИОННОГО УНИВЕРСИТЕТА
Гаврилюк Б.А. Тузов В.А.
ПРИБОРЫ САМОЛЕТА
УЧЕБНОЕ ПОСОБИЕ
ЧАСТЬ 1

Кировоград 201 6
УДК 629.7.054
БКК 39.5
Га 12
А в т о р с к и й к о л л е к т и в:
Гаврилюк Б.А. – старший преподаватель – разделы 1, 4
Тузов В.А. – кандидат технических наук, доцент – разделы 2, 3
Р е ц е н з е н т:
Смирнов В.В. – старший преподаватель
Викладено опис пілотажно-навігаційних приладів і приладів контролю роботи двигуна й інших літакових систем. Дано характеристику, будову, особливості конструкції й порядок використання даного обладнання.
Призначено для курсантів і слухачів факультету льотної експлуатації й слухачів Кіровоградського льотного училища при вивченні авіаційного обладнання відповідно до навчальних програм «Прилади літака» і «Авіоніка» і відповідно до «Програми підготовки для одержання посвідчення приватного пілота (літак) PPL (A)».
Гаврилюк Б.А., …
Га 12 Приборы самолета: учебное пособие: часть 1 / Гаврилюк Б.А., Тузов В.А. – Кировоград: КЛА НАУ, 2016. – 91 с.
Изложено описание пилотажно-навигационных приборов и приборов контроля работы двигателя и других самолетных систем. Дана характеристика, устройство, особенности конструкции и порядок использования данного оборудования.
Предназначено для курсантов и слушателей факультета летной эксплуатации и слушателей Кировоградского летного училища при изучении авиационного оборудования в соответствии с учебными программами «Приборы самолета» и «Авионика» и в соответствии с «Программой подготовки для получения свидетельства приватного пилота (самолет) PPL (A)».
УДК 629.7.054
БКК 39.5
Рассмотрено и рекомендовано для издания и использования в учебном процессе решением кафедры авиационного оборудования, протокол № 6 от
20. 01. 2016 г.
© Гаврилюк Б.А., Тузов В.А., 2016
СОДЕРЖАНИЕ
ВВЕДЕНИЕ......................................................................................................... 5
1 АЭРОМЕТРИЧЕСКИЕ ПРИБОРЫ .............................................................. 6
1.1 Барометрические высотомеры .................................................................... 6
1.1.1 Механический барометрический высотомер.................................... 6
1.1.2 Электромеханические высотомеры ............................................... 10
1.1.3 Электронный барометрический высотомер ВБЭ-2 ....................... 13
1.1.4 Корректор высоты ......................................................................... 14
1.1.5 Вариометр ....................................................................................... 15
1.2 Указатели скорости ................................................................................... 16
1.2.1 Указатель индикаторной (приборной) скорости .......................... 17
1.2.2 Указатели истинной воздушной скорости ..................................... 19
1.2.3 Указатели числа Маха ........................................................................... 20
1.3 Автомат углов атаки и перегрузки (АУАСП) .......................................... 22
1.4 Системы питания приборов полным и статическим давлением ............... 26
2 ПРИБОРЫ ОТОБРАЖЕНИЯ ПРОСТРАНСТВЕННОГО
ПОЛОЖЕНИЯ САМОЛЕТА .......................................................................... 30
2.1 Гироскоп и его свойства ................................................................................................... 30
2.2 Электрический указатель поворота (ЭУП-53) ......................................... 32
2.3 Датчик угловых скоростей ........................................................................ 34
2.4 Авиагоризонты ........................................................................................... 35
2.4.1 Авиагоризонт АГБ-3К ............................................................................ 38
2.4.2 Авиагоризонт АГД-1 .............................................................................. 39
2.4.3 Резервный авиагоризонт АГР-74 ........................................................... 41
2.5 Блок контроля кренов БКК-18................................................................... 42
2.6 Центральные гировертикали ..................................................................... 42
3 КУРСОВЫЕ ПРИБОРЫ И СИСТЕМЫ ..................................................... 44
3.1 Магнитный компас ..................................................................................... 44
3.2 Гироиндукционный компас ГИК-1 ........................................................... 45
3.3 Гирополукомпас ГПК-52АП .................................................................... 50
3.4 Особенности построения курсовых систем............................................... 53
3.4.1 Курсовая система ГМК-1........................................................................ 53
3.4.2 Точная курсовая система ТКС-П .......................................................... 55
3.4.3 Курсовая система БСФК-1 ..................................................................... 57
3.5 Пути повышения точности курсовой информации ................................. 59
4 ПРИБОРЫ КОНТРОЛЯ РАБОТЫ
ДВИГАТЕЛЯ И САМОЛЕТНЫХ СИСТЕМ .................................................. 61
4.1 Манометры ................................................................................................ 61
4.2 Авиационные термометры ......................................................................... 64
4.3 Измерители частоты вращения (тахометры) ........................................... 70
4.4 Топливомеры и расходомеры .................................................................. 71
4. 5 Авиационные часы АЧС-1 ........................................................................ 77
4.6 Комбинированные приборы работы двигателя и самолетных систем ... 78
4.7 Системы регистрации полетной информации ....................................... 80
4.7.1 Трехкомпонентный механический самописец К3-63 .................... 82
4.7.2 Системы регистрации параметров на фотопленку световым
лучом САРПП-12 ..................................................................................... 84
4.7.3 Системы регистрации параметров самолета на магнитную ленту 86
4.7.4 Бортовое устройство регистрации с твердотельным накопителем 88
СПИСОК ИСТОЧНИКОВ ИНФОРМАЦИИ .................................................. 91
ВВЕДЕНИЕ
Приборы самолета являются неотъемлемой частью любого самолета.
Они позволяют правильно пилотировать самолет, решать навигационные задачи и контролировать работу двигателей и самолетных систем.
Как правило, приборы самолета подразделяются на следующие группы:
· Аэрометрические приборы, измеряющие параметры положения и движения самолета по параметрам набегающего воздушного потока воздуха. Это высотомеры, указатели скорости, указатели угла атаки и перегрузки, вертикальной скорости и другие.
· Приборы, контролирующие пространственное положение самолета относительно центра масс: авиагоризонты, курсовые системы, приборы для измерения угловой скорости вращения самолета относительно самолетных осей.
· Приборы контроля двигателей, в состав которых входят различные типы манометров, термометров, измерителей скорости вращения, а также приборы контроля работы самолетных систем: топливной масляной, гидравлической, кислородной, системы кондиционирования воздуха и других.
Данное учебное пособие предназначено для изучения авиационного оборудования по программе подготовки пилотов-любителей и курсантов для полетов на самолетах первоначального обучения. В этой связи в нем отсутствует описание современных навигационных систем и систем автоматического управления полетом (которые изучаются во второй части курса), а основное внимание уделяется изложению принципов построения и летной эксплуатации авиационных приборов электромеханического типа, которые устанавливаются на легких самолетах.
АЭРОМЕТРИЧЕСКИЕ ПРИБОРЫ
Аэрометрические приборы измеряют параметры полета самолета по свойствам окружающего воздушного потока.
БАРОМЕТРИЧЕСКИЕ ВЫСОТОМЕРЫ
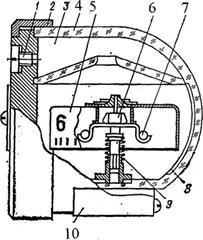
Корректор высоты
Корректоры высоты типа КВ-11 (рис. 1.11) или КВ-16 предназначены для измерения и формирования электрического сигнала, пропорционального отклонению текущей высоты самолета от заданной высоты (например, высоты эшелона) ΔН = Н - Нзад. Этот сигнал выдается в автопилот для автоматической стабилизации самолета на заданной высоте.


Рисунок 1.11 – Внешний вид корректора высоты КВ-11
Работа корректора высоты во многом аналогична работе электромеханического высотомера. Деформация анероидной коробки преобразуется индукционным датчиком в напряжение, которое после усилителя поступает на двигатель. При достижении заданной высоты пилот включает режим стабилизации высоты и тем самым замыкает цепь питания электромагнитной муфты 5 (рис. 1.12). В этот момент на выходе потенциометра 7 напряжение равно нулю, так как его скользящий контакт удерживался пружинами 9 в среднем положении. После срабатывания электромагнитной муфты изменение высоты полета самолета приводит к появлению напряжения на индукционном датчике, вращению двигателя и передаче этого вращения через электромагнитную муфту на перемещение скользящего контакта 8 потенциометра. Смещение скользящего контакта формирует выходное напряжение пропорционально отклонению самолета от заданной высоты.
1-анероид; 2-якорь ИД; 3-статор ИД; 4-двигатель; 5-электромагнитная муфта; 6-усилитель; 7,8-выходной потенциометр; 9-пружина; 10 – редуктор
Рисунок 1.12 – Функциональная схема корректора высоты КВ-11
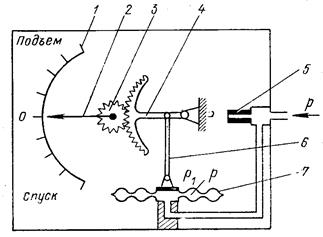
Вариометр
Вариометр предназначен для измерения вертикальной скорости набора высоты или снижения.
Принцип действия основан на измерении скорости изменения статического давления при изменении высоты полета.
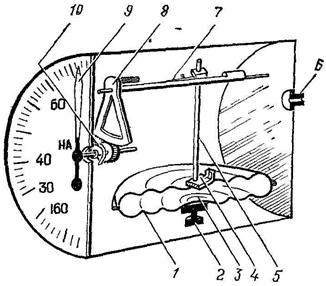
В герметичный корпус (см. рис. 1.13) через штуцер поступает статическое давление и подводится по трубопроводу большого сечения к манометрической коробке 7. Одновременно через тонкую стеклянную трубку (капилляр) 5 это же давление поступает в корпус прибора. В горизонтальном полете статическое давление не изменяется, оно одно и то же внутри и снаружи манометрической коробки, и стрелка прибора стоит на нуле. При изменении высоты статическое давление изменяется. Оно почти мгновенно меняется внутри манометрической коробки и медленнее меняется внутри корпуса прибора из-за капилляра. В результате возникает разница давлений, которая деформирует манометрическую коробку и вызывает перемещение стрелки.
Лицевая часть прибора ВАР-30 показана на рис. 1.14.

|
Кабинный вариометр предназначен для измерения скорости изменения давления в герметичной кабине самолета и представляет собой прибор для контроля работы системы кондиционирования воздуха. В его штуцер поступает воздух непосредственно из герметичной кабины самолета. Обычно в качестве кабинного используют вариометр ВР-10.
УКАЗАТЕЛИ СКОРОСТИ
В самолете измеряется несколько скоростей:
- VИСТ – истинная воздушная скорость - это скорость перемещения самолета относительно окружающего воздуха;
- W – путевая скорость – это скорость перемещения самолета относительно земли. Путевая скорость равна векторной сумме истинной воздушной скорости и скорости ветра:
 ,
,
где VПР – индикаторная (приборная) скорость.
Указатели числа Маха
При больших скоростях и на большой высоте проявляются эффекты сжимаемости воздуха, и на некоторых частях самолета ламинарное течение становится турбулентным, что резко изменяет аэродинамические характеристики самолета. В этих условиях приборная скорость уже в меньшей степени характеризует аэродинамику самолета, чем число Маха. Для каждого самолета существует критическое значение числа Маха, при достижении которого дальнейшее увеличение скорости за счет увеличения тяги двигателя нецелесообразно из-за резкого увеличения лобового сопротивления.
Число Маха равно отношению истинной воздушной скорости к скорости звука на текущей высоте полета самолета:
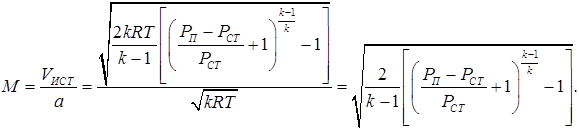
Как видно из этой формулы, если подставить в выражение для числа М выражение VИСТ, то результат показывает, что число М является функцией отношения динамического давления к статическому давлению, то есть такой же, как для истинной воздушной скорости:
 .
.
Именно поэтому механизм для измерения числа М (рис. 1.21) такой же, как для измерения VИСТ. В формуле для определения числа М значение температуры наружного воздуха Т сокращается, поэтому измерение числа М оказывается более точным, так как не требует введение поправки на температуру.
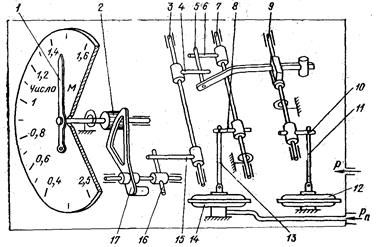

1 – стрелка; 2 – трибка; 3, 7, 9 – оси; 4, 5, 6, 15, 16 – поводки; 8, 10 – кривошипы,
11, 13 – тяги; 12 – анероидная коробка; 14 – манометрическая коробка; 17 – зубчатый сектор
Рис. 1.21– Кинематическая схема и лицевая часть указателя числа М
Действия экипажа
· Сравнить показания приборов КВС с показаниями приборов второго пилота.
· По указанным признакам определить, что действительно произошла закупорка линии статического давления.
· Проверить обогрев ПВД по сигнализации исправности обогрева.
· Если обогрев исправен, при наличии системы продувки, включить кран в режим продувки. Через 30 сек. вернуть назад, и проверить, не восстановилось ли показание приборов. Если нет, то установить кран в положение «резервная статика».
Действия экипажа
· Сравнить показания указателей скорости. Привести самолет в горизонтальный полет.
· Увеличить или уменьшить скорость полета и убедиться в том, что произошла закупорка полного давления и определить неисправный указатель скорости. При наличии резервной линии полного давления переключить кран «Динамика» в резервное положение.
Разгерметизация статики.
При разгерметизации линии статического давления показания приборов становятся неустойчивыми. При герметичной кабине самолета показание высотомера уменьшается и приближается к показанию высоты в кабине (указатель УВПД), а показания вариометра соответствуют скорости изменения давления в герметичной кабине (как кабинном вариометре).
ПОЛОЖЕНИЯ САМОЛЕТА
ГИРОСКОП И ЕГО СВОЙСТВА
Гироскоп – быстро вращающееся симметричное тело, ось вращения которого может изменять свое положение в пространстве (рис. 2.1).
Технический гироскоп представляет собой гиромотор, который вращает массивное тело (ротор мотора). Гиромотор может быть электрическим трехфазным асинхронным двигателем, либо пневматическим гиромотором, который вращается под действием струи воздуха.
Гиромотор закрепляется с помощью 2-х рамок: внутренней и внешней, которые образуют кардановый подвес.
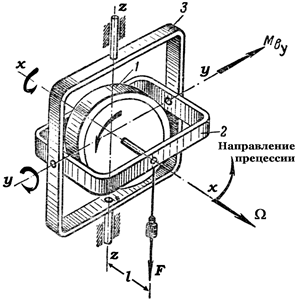
1 – ротор; х–х – ось собственного вращения; 2 – внутренняя рама карданова подвеса; 3 – внешняя рама карданова подвеса; у–у – внутренняя ось подвеса; z– z – внешняя ось подвеса
Рисунок 2.1 – Гироскоп с тремя степенями свободы
Свойства гироскопа с тремя степенями свободы:
1. Если на главную ось гироскопа не действуют внешние силы и моменты, то она сохраняет свое положение неизменным в мировом пространстве.
2. Кратковременные силы и моменты (удары, вибрация) не влияют на положение главной оси гироскопа, а лишь вызывают быстрозатухающие нутационные колебания.
3. Под действием постоянного внешнего момента МВН, действующего на гироскоп, гироскоп прецессирует, т.е. его главная ось меняет свое положение, в сторону, чтобы по кратчайшему расстоянию совместить вектор угловой скорости собственного вращения с вектором МВН. Скорость прецессии гироскопа ωПР прямо пропорциональна внешнему моменту МВН и обратно пропорциональна кинетическому моменту гироскопа Н.

 ,
,
где Н = J Ω;
Ω – скорость вращения ротора гироскопа;
J – момент инерции ротора относительно оси вращения.
Чем больше кинетический момент, тем сильнее препятствует гироскоп действию внешних сил и моментов.
Для увеличения кинетического момента нужно увеличить скорость вращения (она обычно составляет 22·103 – 23·103об/мин) и увеличить размеры и массу вращающегося тела.
Во время прецессии гироскопа силами инерции создается гироскопический момент МГ, пропорциональный скорости прецессии и кинетическому моменту 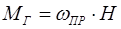 . Причем гироскопический момент равен внешнему моменту и противоположно ему направлен: МГ = - МВН.
. Причем гироскопический момент равен внешнему моменту и противоположно ему направлен: МГ = - МВН.
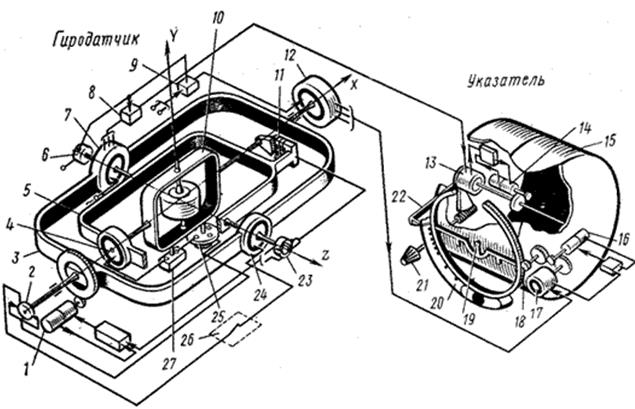
ДАТЧИК УГЛОВЫХ СКОРОСТЕЙ
Датчик угловых скоростей предназначен для измерения угловых скоростей разворота самолета относительно самолетный осей X, Y, Z:

Сигналы, пропорциональные угловым скоростям подаются в автопилот для демпфирования колебаний самолета по всем трем осям и повышения устойчивости и управляемости самолета.
Принцип действия основан на использовании трех гироскопов с двумя степенями свободы, которые реагируют на угловые скорости разворота самолета. Оси чувствительности гироскопов расположены вдоль самолетных осей.
Каждый гироскоп вместе с внутренней рамой разворачивается на угол, пропорциональный угловой скорости вращения самолета относительно соответствующей оси. Этот разворот преобразуется с помощью индукционного датчика в напряжение. Внешний вид датчиков показан на рис. 2.6.

Рис. 2.6 – Внешний вид датчиков угловых скоростей
Двухстепенной гироскоп также используется в выключателях коррекции (ВК-53, ВК-90), измеряя угловую скорость разворота самолета относительно вертикальной оси (рис. 2.7).
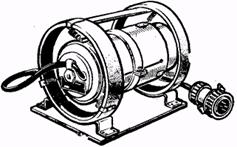
Рисунок 2.7 – Кинематическая схема и внешний вид выключателя коррекции
АВИАГОРИЗОНТЫ
Авиагоризонты предназначены для измерения углов крена и углов тангажа самолета.
Угол крена γ – угол между поперечной осью самолета (плоскостью крыла) и плоскостью горизонта.
Угол тангажа υ – угол между продольной осью самолета и плоскостью горизонта.
Принцип действия авиагоризонта основан на использовании гироскопа с 3-мя степенями свободы, его свойстве удерживать положение главной оси гироскопа неизменным в пространстве. В авиагоризонте главная ось гироскопа расположена по истинной вертикали и относительно нее определяются углы крена и тангажа.
Даже идеальный гироскоп, имеет «кажущийся» уход от вертикали, по которой он установлен. Имеется две причины ухода гироскопа:
1) Из-за сферичной формы Земли. При перелете самолета из одной точки Земли в другую положение вертикали меняется, а гироскоп сохраняет прежнюю вертикаль.
2) Из-за суточного вращения Земли, так как главная ось гироскопа сохраняет свое положение относительно мирового пространства, а не относительно Земли.
Реальный гироскоп имеет кроме того собственный уход, обусловленный небалансом и трением в подшипниках карданного подвеса.
Поэтому гироскоп, установленный по вертикали, только в течение короткого времени обеспечивает точное измерение вертикали места, а следовательно, и углов крена и тангажа, и требует корректировки положения главной оси. Как правило, положение главной оси гироскопа корректируется с помощью маятника. Чаще всего используется жидкостная маятниковая коррекция, которая представляет собой две стеклянные трубки, заполненные токопроводящей жидкостью, имеющие пузырек воздуха и электрические контакты (см. рис. 2.8).
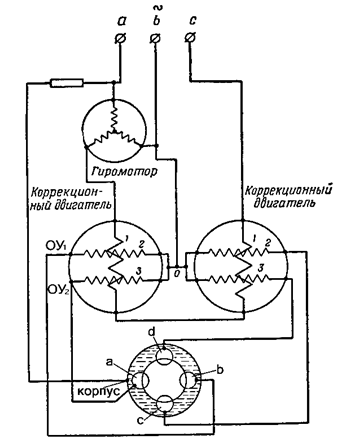
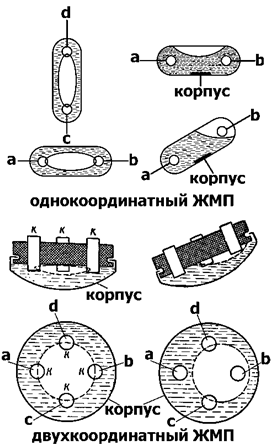
а) б)
1 - воздушный пузырек; 2 - медная чаша; 3 - коррекционные двигатели; 4 - контакты; 5 - токопроводящая жидкость.
Рисунок 2.8 – Электрическая схема маятниковой коррекции
Принцип работы маятниковой коррекции заключается в следующем: жидкостный маятник установлен на внутренней раме гироскопа, и, если главная ось гироскопа установлена по вертикали, то пузырек воздуха будет находиться в центре.
Если главная ось гироскопа уходит от вертикали, то пузырек уходит на конец трубки и оголяет один из контактов. При этом прерывается электрическая цепь через проводящую жидкость. Это заставляет коррекционной двигатель создавать внешний момент, действующий на гироскоп, который в свою очередь вызывает прецессию гироскопа и возвращение его в вертикальное положение.
В некоторых авиагоризонтах используется двухкоординатный маятник, представляющий собой медную чашку с 4-мя контактами. Такой маятник можно рассматривать как два однокоординатных маятника, собранные в одном корпусе.
Во время разворота самолета и при линейных ускорениях жидкость смещается в маятнике под действием ускорения. В этом случае жидкостная коррекция стремится установить ось гироскопа по ложной вертикали. Чтобы это исключить, используют выключатель коррекции (например, ВК-53), который автоматически отключают цепи жидкостной маятниковой коррекции на время разворота при скорости разворота больше (0,1–0,3) градуса в секунду.
Выключатель коррекции – отдельный прибор, имеющий гироскоп с двумя степенями свободы. Во время разворота самолета гироскоп реагирует на угловую скорость, разворачивается и через временную задержку (6-10 с) отключает маятниковую коррекцию с помощью реле.
Авиагоризонт АГБ-3К
Измеряет углы крена и тангажа, а также наличие скольжения. Принцип действия основан на использовании гироскопа с 3-мя степенями свободы, главная ось которого первоначально с помощью арретира устанавливается в вертикальное положение. Она остается в вертикальном положении в то время, как самолет, изменяя угол крена и тангажа, вместе с корпусом прибора разворачивается относительно главной оси гироскопа (см. рис. 2.9).
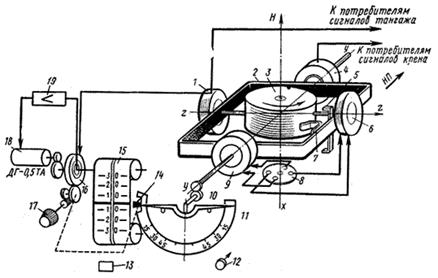
1-сельсин-датчик тангажа: 2 – наружная рамка гироузла; 3 - гироузел; 4 - сельсин-датчик крена; 5-упор; 6,9-моментные двигатели; 7 - ограничитель; 8-жидкостный датчик коррекции; 10 - силуэт самолета; 11 - шкала крена; 12 - арретир; 13 - флажок отказа питания; 14-индекс; 15 - шкала тангажа; 16 - сельсин-приемник тангажа; 11-кремальера регулировки горизонта; 18-двигатель-генератор; 19 – усилитель
Рисунок 2.9 – Кинематическая схема авиагоризонта АГБ-3К
Разворот по крену через зубчатую пару разворачивает силуэт самолета на двойной угол крена. Угол тангажа измеряется с помощью электрической дистанционной передачи, состоящей из сельсин-датчика 1, установленного на оси внутренней рамы гироскопа, трехпроводной линии связи, сельсин-приемника 16, усилителя 19 и двигателя 18, который вращаясь, перемещает шкалу тангажа 15. На лицевой части (рис. 2.10) имеется силуэт самолета, шкала углов крена, шкала тангажа, флажок отказа питания, кнопка арретира 12, ручка перемещения шкалы тангажа 17, указатель скольжения 21.
Измерение тангажа ограничено углами от 0 до 80О. Ограничение связано с выбиванием гироскопа при совмещении оси внешней рамы с главной осью гироскопа. Чтобы избежать выбивания в авиагоризонте имеются ограничители, которые при углах тангажа более 80О препятствуют дальнейшему движению внешней рамы в сторону совмещения с главной осью гироскопа.
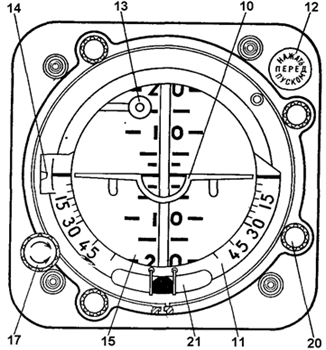
Рисунок 2.10 – Лицевая часть авиагоризонта АГБ-3
Авиагоризонт АГД-1
Авиагоризонт дистанционный АГД-1 (рис. 2.11) позволяет измерять углы крена и тангажа без ограничений и может использоваться при выполнении фигур высшего пилотажа. Для исключения выбивания гироскопа в этом авиагоризонте имеется дополнительная следящая рама 3 (рис. 2.12), с помощью которой удается постоянно поддерживать перпендикулярность главной оси гироскопа и плоскости внешней рамы. Перпендикулярность контролируется с помощью индукционного датчика 11. Сигнал с индукционного датчика поступает на двигатель 1, который разворачивает внешнюю раму 5 таким образом, что бы внутренняя рама 10 и внешняя рама 5 остались взаимно перпендикулярны.
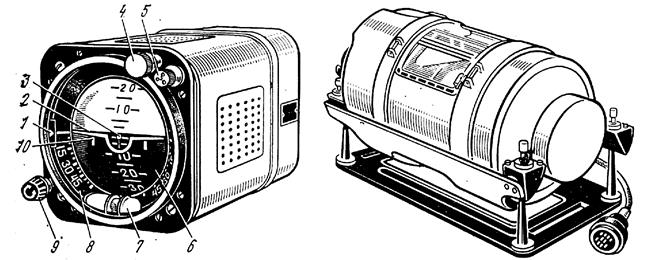
1 – индекс центровки тангажа; 2 – линия искусственного горизонта; 3 – нулевой индекс;
4 – кнопка арретирования; 5 – лампа сигнализации; 6 – цилиндрическая шкала тангажа;
7 – указатель скольжения; 8- шкала крена; 9- кремальера центровки тангажа;
10- силуэт-самолет
Рисунок 2.11 – Указатель и гиродатчик АГД-1С
1, 14, 16-двигатель-генератор; 2, 23-коммутаторы; 3, 5, 10 - рамки; 4, 24 - электродвигатели; 7, 12, 13, 17 - сельсины; 8, 9 - реле; 11 - индуктивный датчик; 15 - картушка; 18 - шестерня; 19, 22 - индексы; 20 - шкала; 21 - кремальера; 25 - жидкостной маятниковый переключатель; 26 - контакты выключателя коррекции; 27 - жидкостной выключатель
Рисунок 2.12 – Кинематическая схема авиагоризонта АГД-1
В связи с усложнением гироузла его помещают в отдельный корпус, именуемый 458 МКС (рис. 2.11, 2.12), а связь между индикатором и гиродатчиком обеспечивается двумя электрическими дистанционными передачами на сельсинах. В связи с тем, что гиродатчик недоступен пилоту, арретирование в этом авиагоризонте дистанционное, электрическое. Механизм арретирования приводится в действие при нажатии кнопки, а также автоматически при включении питания авиагоризонта. Красная сигнальная лампочка отказа включается при отсутствии или нарушении питания, а также в процессе арретирования.
Эксплуатация авиагоризонта:
1) Включить питание 27 В и 36 В. При этом в течении не более 15 сек лампа отказа должна погаснуть, указывая на завершение арретирования.
2) Через 2-3 минуты проверить перемещение шкалы тангажа в пределах 10о-12о ручкой перемещения шкалы тангажа.
3) Совместить треугольный индекс с нулевой меткой шкалы крена.
5) На рулении при разворотах авиагоризонт не должен изменять показания угла крена и тангажа.
6) После взлета проверить показания прибора плавным изменением крена.
БЛОК КОНТРОЛЯ КРЕНОВ БКК-18
Блок контроля кренов БКК-18 (рис. 2.14) предназначен для сравнения показаний 3-х авиагоризонтов самолета по крену. При отклонении показаний одного из авиагоризонтов по крену от среднеарифметического на 7о+2о прибор считается отказавшим. При этом включается табло отказа соответствующего авиагоризонта.
БКК-18 проверяется перед полетом с помощью пульта проверки. При установке переключателя в положение 1 и 2 включается зеленая лампочка «БКК исправен» и вся сигнализация отказов авиагоризонтов. При отказе БКК-18 по питанию загорается табло «Нет контроля АГ».

Рисунок 2.14 – Внешний вид БКК-18
ЦЕНТРАЛЬНЫЕ ГИРОВЕРТИКАЛИ
Центральные гировертикали типа ЦГВ-4, МГВ-1 предназначены для выдачи потребителям электрических сигналов, пропорциональных углам крена и тангажа. В этом приборе реализуется так называемая силовая гиростабилизация платформы. Платформа установлена в кардановом подвесе, выставляется вначале по вертикали и удерживается в этом положении с помощью двух двигателей. Двигатели управляются двумя двухстепенными гироскопами. При появлении любого внешнего момента, который пытается вывести платформу из вертикального положения, соответствующий гироскоп прецессирует и перемещает скользящий контакт потенциометра, что формирует, таким образом, электрическое напряжение, поступающее на двигатель. Двигатель создает момент, равный по величине и противоположный направлению внешнего момента. Коррекция вертикали осуществляется так же, как и в авиагоризонтах с помощью жидкостного маятника. С помощью него обеспечивается начальное арретирование. На осях карданного подвеса установлены потенциометрические датчики, которые выдают напряжения, пропорциональные углам крена и тангажа, на индикаторы, в автопилот и другие потребители.
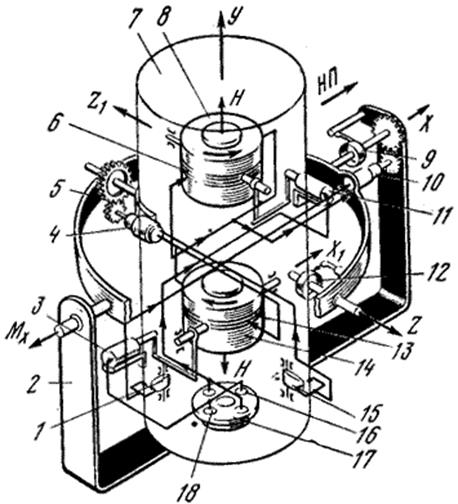
1, 15 - маятники; 2 - корпус; 3, 4, 10, 11 - электродвигатели; 5 - рамка; 6, 9, 12, 13 - потенциометры; 7 - платформа; 8, 14 - гироскопы; 16, 18 - контакты; 17 – маятник
Рисунок 2.15 – Кинематическая схема центральной гировертикали
КУРСОВЫЕ ПРИБОРЫ И СИСТЕМЫ
МАГНИТНЫЙ КОМПАС
Предназначен для измерения магнитного курса самолета (см. рис. 3.1).
Принцип действия основан на взаимодействии подвижного постоянного магнита с магнитным полем Земли.
|
|
В корпусе, заполненном жидкостью (см. рис. 3.2), на подпружиненный подпятник с помощью иглы и корундового камня установлена подвижная магнитная система, состоящая из двух цилиндрических магнитов и подвижной шкалы-картушки. Спереди на корпусе имеется прозрачное окно, через которое видна подвижная шкала с оцифровкой в 300 и ценой деления 50. Для отсчета курса нанесена визирная линия.
Прибор обладает следующими ошибками:
1) Ошибка трения.
2) Колебания шкалы, в том числе увлечение картушки жидкостью после окончания разворота.
3) Установочная.
4) Девиация:
- полукруговая – обусловлена наличием на самолете постоянных магнитов;
- четвертная – наличие магнитомягких ферромагнетиков;
Девиационные ошибки частично компенсируются с помощью девиационного прибора, расположенного в нижней части КИ-13.
5) Из-за негоризонтального положения магнитного поля Земли вблизи полюсов.
При кренах, при наличии вертикальной составляющей магнитного поля картушка дополнительно разворачивается, создавая поворотную ошибку.
6 ) Имеется предельное значение крена (17О), при которых картушка устанавливается на упор корпуса и оказывается неподвижной.
Таким образом, магнитный компас используется для измерения магнитного курса только в горизонтальном полете, после усреднения нескольких показаний компаса. Используется как резервный прибор, а также для своевременного определения отказа курсовой системы.
ГИРОПОЛУКОМПАС ГПК-52АП
К сожалению, при полете самолета с постоянным магнитным курсом, например, по ГИК-1 самолет летит по криволинейной траектории (локсодромии), обусловленной схождением магнитных меридианов. Поэтому для полета по кратчайшему расстоянию между двумя точками на Земле (по ортодромии) используется гирополукомпас ГПК (рис. 3.7).
Гирополукомпас предназначен для измерения ортодромического курса (приведенного курса), угла между продольной осью самолета и северным направлением магнитного меридиана последнего места коррекции.
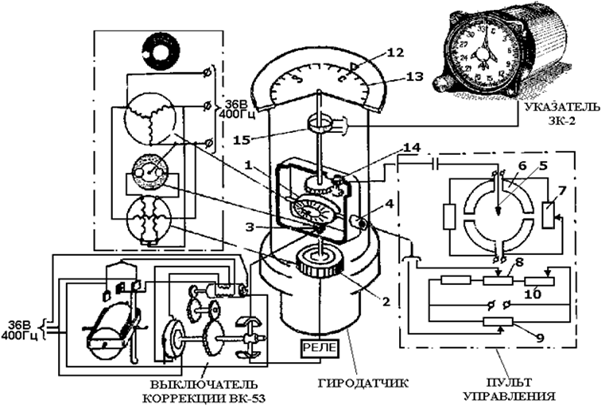
Рисунок 3.7 – Функциональная схема гирополукомпаса ГПК-52 АП
Принцип действия основан на использовании гироскопа с 3-мя степенями свободы, главная ось которого расположена горизонтально. Если ее удерживать неподвижной относительно Земли, то относительно нее можно измерять перемещение самолета по курсу, не ориентируясь по магнитному полю Земли.
В состав ГПК входят: курсовой гироскоп, пульт управления, задатчик курса ЗК-2, выключатель коррекции ВК-53, соединительная коробка СК-18.
Курсовой гироскоп имеет две системы коррекции, для того чтобы его ось оставалась параллельной относительно плоскости горизонта и неподвижной в азимуте относительно Земли:
1) Горизонтальная коррекция – удерживает главную ось гироскопа в горизонтальном положении с помощью жидкостного маятника, и корректирующего двигателя. Во время разворотов система коррекции автоматически выключается с помощью выключателя коррекции ВК-53.
2) Азимутальная коррекция заставляет непрерывно прецессировать гироскоп в азимуте вместе с вращением Земли, чтобы оставаться неподвижным в азимуте относительно Земли. Главную ось гироскопа нужно вращать со скоростью ω, зависящей от широты φ места самолета: ω = Ωз·sinφ.
Азимутальная коррекция обеспечивается с помощью установки ручки «широта» на пульте управления значения широты от 0 до 900, причем шкала сделана неравномерной, так чтобы угол поворота соответствовал синусу широты. На оси ручки расположен потенциометр, который выдает напряжение, пропорциональное ω = Ωз·sinφ. Это напряжение поступает на двигатель азимутальной коррекции, который создает внешний момент, заставляющий прецессировать гироскоп.
Гирополукомпас не имеет чувствительного элемента, измеряющего направление магнитного поля Земли, поэтому после его включения он показывает случайное значение и нуждается в начальной выставке. Начальная выставка осуществляется путем установки на индикаторе ГПК текущего магнитного курса, измеренного, например, с помощью ГИК-1. Для этого с помощью переключателя «задатчик курса» на пульте управления (рис. 3.8) подключают напряжение к двигателю, который вращает шкалу прибора.
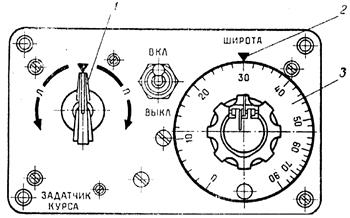
Рисунок 3.8 – Лицевая часть пульта управления гирополукомпаса ГПК-52 АП
Перед полетом с помощью кремальеры заданного курса на задатчике курса ЗК-2 (рис. 3.9) устанавливают курс взлета, который отсчитывается по вращающейся шкале относительно верхнего неподвижного треугольного индекса.
Рисунок 3.9 – Лицевая часть задатчика курса ЗК-2
После взлета прибор показывает ортодромический курс, который в процессе полета по ортодромии отличается от гиромагнитного курса на величину схождения меридианов. Как правило, перед сменой ЛЗП нужно установить новое значение широты и сделать коррекцию курса, т.е. установить на ГПК текущее значение магнитного курса по ГИК (ручкой ЗК на ПУ). На указателе ЗК-2 устанавливают новое значение заданного курса и осуществляют разворот самолета.
На рис. 3.10 показана лицевая часть гирополукомпаса ГПК-48, не имеющего автоматической азимутальной коррекции, требующего в этой связи более частой ручной коррекции с помощью ручки «арретир».

Рисунок 3.10 – Лицевая часть гирополукомпаса ГПК-48
Курсовая система ГМК-1
На рисунке 3.11 показана функциональная схема курсовой системы ГМК-1 ГЭ в комплектации для самолета Л-410 УВП, АН-26 и др.
В курсовой системе ГМК-1 ГЭ два гироагрегата: основной и запасной. Один гироагрегат работает в режиме магнитной коррекции МК, другой – в режиме гирополукомпаса ГПК. Два указателя ИКУ-1 всегда подключены к гироагрегату, работающему в режиме магнитной коррекции, и выдают гиромагнитный курс. Два других указателя УГР-4 УК в зависимости от положения переключателя режимов на пульте управления «МК-ГПК-АК» показывают соответственно гиромагнитный, ортодромический или истинный курс. Истинный курс формируется путем коррекции гироагрегата дистанционным астрокомпасом или вводом магнитного склонения в коррекционном механизме. Коррекционный механизм КМ всегда отображает магнитный курс из индукционного датчика.
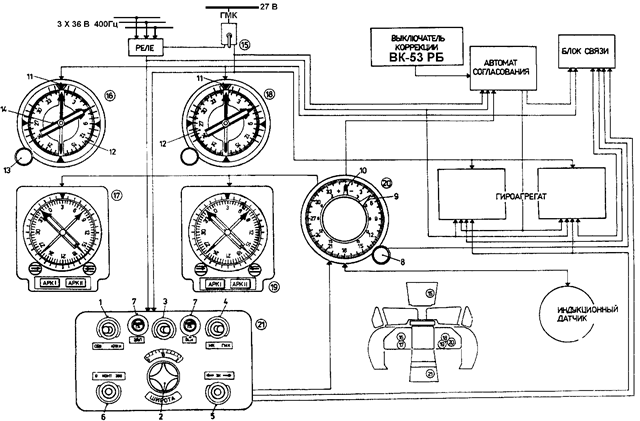
Рис. 3.11 – Функциональная схема курсовой системы ГМК-1 ГЭ
На пульте управления (рис. 3.12) расположены следующие органы управления:
· переключатель режимов «МК-ГПК-АК»;
· переключатель потребителей « ОСН-ЗАП » предназначен для выбора гироагрегата (основного или запасного) для подключения к основным потребителям;
· шкала и ручка «ШИРОТА» для ввода азимутальной коррекции гироскопа, работающего в режиме ГПК;
· переключатель «СЕВ-ЮЖН» предназначен для изменения направления прецессии гироскопа при азимутальной коррекции в зависимости от нахождения самолета в северном или южном полушарии Земли;
· переключатель «ЗК» для включения скорости быстрого согласования в режиме МК и для установки курса при начальной выставке и при коррекции во время полета;
· переключатель «0 – КОНТР – 300» предназначен для проверки работоспособности курсовой системы в режиме МК;
· лампы «ЗАВАЛ ГА» для сигнализации отклонения главной оси гироскопов от горизонтального положения.
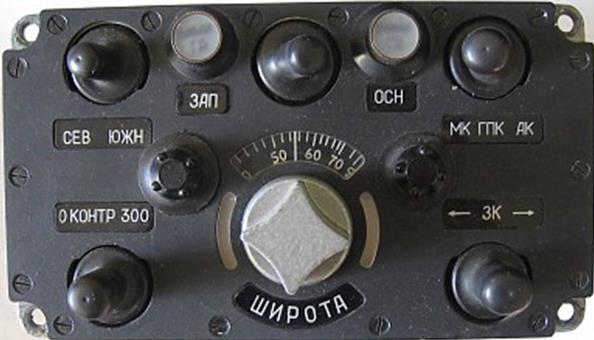
Рисунок 3.12 – Пульт управления курсовой системы ГМК-1 ГЭ
КУРСОВАЯ СИСТЕМА БСФК-1
Базовая система формирования курса БСФК-1 имеет два полукомплекта, каждый из которых измеряет и выдает потребителям необходимые на данном режиме полета гиромагнитный курс и приведенные курсы по магнитному и истинному меридиану.

Рисунок 3.16 – Внешний вид блоков курсовой системы БСФК-1:
БУ-12, БСК-4 и БГМК-6.
Комплект системы БСФК-1 (Рис. 3.16-3.18):
- Блок согласования курса БСК-4 2шт.
- Блок гиромагнитного курса БГМК-6.– 2шт.
- Блок усилителей БУ-12.
- Гироагрегат ГА-8.
- Инерциальная курсовертикаль.
- Индукционный датчик ИД-6. 2шт
- Пульт управления ПУ-41.


Рисунок 3.17 – Датчики курса курсовой системы БСФК-1: ИКВ-72, ГА-8, ИД-6

Рисунок. 3.18 – Пульт управления ПУ-41
Курсовая система имеет три режима работы: магнитной коррекции МК, гирополукомпаса ГПК и внешней коррекции ВК. Основным является режим внешней коррекции, в котором курсовая система работает совместно с бортовым цифровым вычислителем. Вычислитель выполняет следующие задачи:
- Обеспечивает автоматическую начальную выставку курсовой системы по индукционному датчику после ввода программы полета;
- Вычисляет поправку к курсу во время пробега по ВПП;
- Вычисляет и вводит азимутальную поправку на вращение Земли;
- обеспечивает автоматическую коррекцию приведенных курсов в поворотных пунктах маршрута, путем вычисления поправки, учитывающей угол схождения меридианов и изменение угла магнитного склонения.
И САМОЛЕТНЫХ СИСТЕМ
Приборы контроля работы двигателя измеряют: давление и температуру топлива и масла двигателя; скорость вращения коленчатого вала двигателя, количество и часовой расход топлива; температуру головок цилиндров или выходящих газов, вибрацию и другие параметры. Знание этих параметров позволяет контролировать режимы работы двигателя на земле и в полете.
МАНОМЕТРЫ
На самолете устанавливают манометры контроля давления в масляной и топливной системах двигателя, в гидравлической системе, воздушной системе запуска двигателя и в кислородном оборудовании.
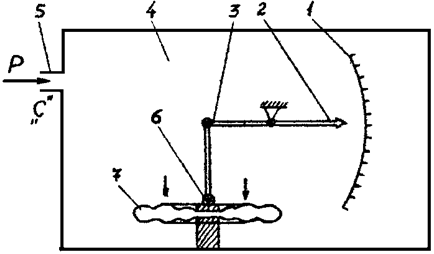
Мановакуумметры измеряют давление топливной смеси во всасывающем патрубке авиадвигателя в диапазоне от 0 до 1,5 - 2 атм. Чувствительным элементом является анероидная коробка (рис. 4.1), установленная в герметичный корпус. Измеряемое давление поступает через штуцер внутрь корпуса прибора. При изменении давления анероидная коробка деформируется и через передаточный механизм перемещает стрелку. Перед полетом прибор показывает атмосферное давление на аэродроме.

1 – анероидная коробка; 2 – неподвижный центр коробки; 3 – подвижный центр коробки; 4 – температурный компенсатор; 5 – тяга; 6 – штуцер; 7 – валик; 8 – зубчатый сектор; 9 – стрелка; 10 – пружина
Рисунок 4.1 – Мановакуумметр
Механические манометры
Принцип работы механического манометра (рис. 4.2) основан на использовании чувствительного элемента - трубчатой пружины 1, внутрь которой через штуцер поступает измеряемое давление. Под действием этого давления пружина разжимается и ее свободный конец 2, двигаясь, перемещает стрелку.
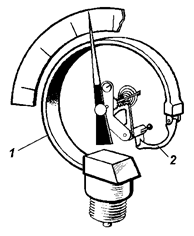
1 – трубчатая пружина; 2 – подвижный конец трубчатой пружины
Рисунок 4.2 – Кинематическая схема механического манометра:
Пример использования такого манометра (МА-100) на самолете Л-410 УВП, который предназначен для измерения давления гидросмеси в системе стояночного тормоза в пределах от нуля до 100 кгс/см2. Лицевая часть указателя представлена на рис. 4.3.
Двухстрелочный механический манометр ЛУН-1446.01-8 предназначен для измерения давления в тормозной системе.


Рисунок 4.3 – Лицевые части указателей манометра МА-100 иЛУН-1446.01-8
Дистанционные манометры измеряют давление топлива, масла, гидросмеси в системе тормозов. Состоят из датчиков, установленных на двигателе и указателей на приборной доске пилотов.
Манометр с потенциометрическим датчиком (рис. 4.4) представляет собой герметичный корпус, внутри которого имеется манометрическая коробка. Внутрь коробки поступает измеряемое давление, которое деформирует манометрическую коробку. Деформация манометрической коробки преобразуется в перемещение скользящего контакта потенциометра 3, включенного в мостовую схему с логометром. Питание комплекта от сети постоянного тока.
1 – постоянный магнит; 2 – подвижный магнит 1 – мембрана; 2 – шток; 3 – якорь;
3 – потенциометр; 4 – скользящий контакт; 4 – диоды; 5 – подвижный магнит;
5 – мембрана 6 – стрелка; 7 – шкала
Рисунок 4.4 - Схема дистанционного Рисунок 4.5 - Схема манометра
манометра на постоянном токе на переменном токе
Недостатки потенциометрических преобразователей связанны с износом потенциометра, нарушением контактов при вибрациях и колебаниях измеряемого давления, повышенных температурах. Эти недостатки устранены в дистанционных индуктивных манометрах типа ДИМ (см. рис. 4.5). В них перемещение подвижного центра манометрической коробки под действием давления преобразуется в изменение воздушных зазоров в магнитопроводе, на котором установлены катушки индуктивности. Изменение зазоров приводит к изменению индуктивностей, которые включены в мостовую схему переменного тока.


Рисунок 4.6 – Лицевые части двухстрелочных манометров
2ДИМ-240 и 2ДИМ-150
Пример использования манометра ДИМ на самолете АН-26:
Давление в основной сети и в контуре тормозов отбражается дистанционным индуктивным манометром 2ДИМ-240. В комплект дистанционного индуктивного манометра 2ДИМ-240 входят: манометр двухстрелочный УИ2-240К (рис. 4.6) и два датчика давления ИД-240.
Питание комплекта от сети переменного тока 36 В 400 Гц.
АВИАЦИОННЫЕ ТЕРМОМЕТРЫ
На ВС устанавливаются термометры масла, выходящих газов, топлива, воздуха в кабинах, салонах и технических отсеках, в блоках некоторых бортовых систем.
Биметаллические термометры используют принцип биметаллической пластины, которая изгибается под действием температуры.
Биметаллическая пластина состоит из соединенных на концах двух пластинок из металлов, имеющих разные коэффициенты теплового расширения. При нагреве пластинка изгибается, потому что один металл расширяется сильнее, чем другой. Один конец пластины неподвижный, другой перемещается. Перемещение подвижного конца пластины при ее изгибе передается на перемещение стрелки. Биметаллические термометры измеряют температуру воздуха в кабине самолета, внутри электронных блоков, наружного воздуха. Основными достоинствами биметаллических термометров являются: отсутствие электропитания, простота конструкции и надежность.
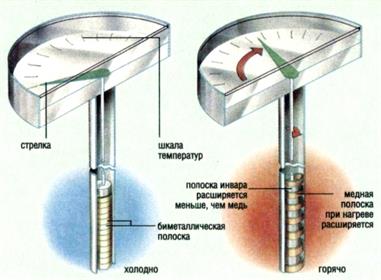
Рисунок 4.7 – Устройство биметаллического термометра
В качестве металлов биметаллической пластины обычно используют медь и инвар (сплав железа и никеля). Для увеличения чувствительности биметаллическую пластинку делают длиннее и сворачивают в спираль.
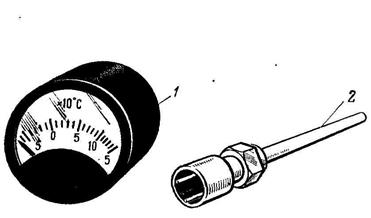
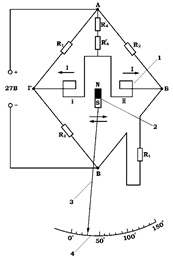
Термометры с термосопротивлением. В качестве чувствительного элемента используют проволочное сопротивление (рис.4.8). Электрическое сопротивление проволоки зависит от температуры: Rt = R0(1+at0). Термосопротивление включается в мост постоянного тока с логометром (рис. 4.9, 4.10). Термометры измеряют температуру воздуха и масла.


Рисунок 4.8 – Лицевая часть термометра и внешний вид датчика
|
|
Термометр наружного воздуха ТНВ-15. предназначен для измерения температуры наружного воздуха и используется как пилотажно-навигационный прибор.
Термометр ТНВ-15 состоит из указателя ТНВ-15 и приемника температуры П-5 (рис. 4.11). Термометр питается постоянным током напряжением 28,5В.
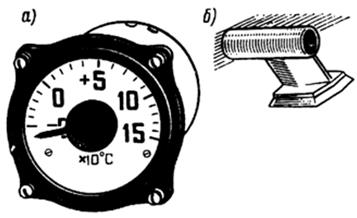
Рисунок 4.11 – Термометр наружного воздуха ТНВ-15
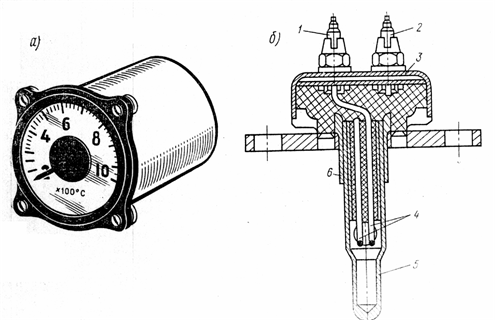
Термометр унифицированный электрический ТУЭ-48 предназначен для измерения температуры воздуха в подводящих трубопроводах кабины, салона и системы индивидуальной вентиляции, температуры смеси в карбюраторе, наружного воздуха (рис. 4.12).


Рисунок 4.12 – Указатели температуры
смеси в карбюраторе и наружного воздуха
Приборы питаются постоянным током напряжением 28,5 В.
Термопарные термометры измеряют температуру головок цилиндров и температуру выходных газов двигателя (рис. 4.13-4.15).
|
|
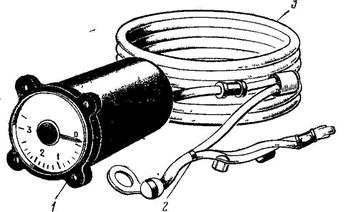
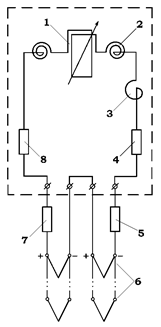


Рисунок 4.15 – Лицевые части термометров газов между турбинами
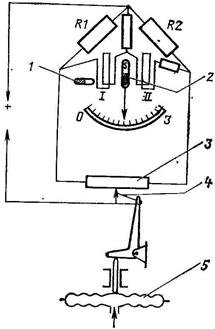
Чувствительным элементом являются термопары, которые представляют собой спай двух разнородных металлов. При нагревании спая, на других концах термопары создается ЭДС, которая измеряется милливольтметром. Термопара или система термопар подключаются к измерительному прибору через компенсационные провода.
Термометр ТГ-2А предназначен для измерения температуры выходящих газов из авиадвигателя (рис. 4.16).
1 - хромелевый контактный винт; 2 — алюмелевый контактным винт; 3 — крышка 4 - термоэлектроды; 5 — камора торможения; 6— корпус
Рисунок 4.16 – Термометр ТГ-2А: а — указатель ИТГ-2; б — термопара;
По такому же принципу работают сигнализаторы температуры предназначенные для измерения, например, температуры обойм подшипников валов двигателя. В комплект сигнализатора входят: термопара, усилитель и табло или лампа сигнализации.
Трехстрелочный моторный индикатор нашел широкое применение в самолетах в качестве комбинированного прибора контроля работы двигателя. Он предназначен для измерения давления топлива, давления масла и температуры масла двигателя.
Трехстрелочный указатель с датчиками показан на рисунке 4.17.
Датчик температуры представляет собой термосопротивление, выполненное из никелевой проволоки, намотанной на диэлектрический каркас и помещенное в металлический корпус. Датчик помещен в масляный бак двигателя.
Принцип действия и конструкция датчиков давления топлива и масла одинаковые, и аналогичные принципу действия и конструкции дистанционного манометра типа ДИМ.
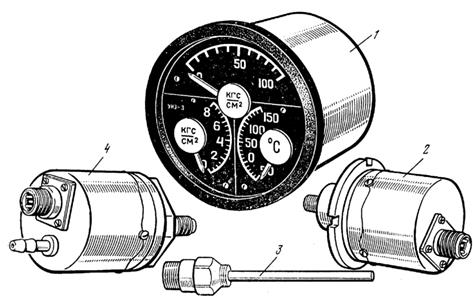
1 – указатель УИЗ-3; 2 - датчик давления масла ИД-8; 3 – датчик температуры масла П-1;
4 – датчик давления топлива ИД-100
Рисунок 4.17 – Комплект трехстрелочного моторного индикатора ЭМИ-3РТИ
Манометры масла и топлива питаются переменным однофазным током напряжением 36 В, частотой 400 Гц; термометры масла — постоянным током напряжением 28,5 В.
Перед полётом следует обратить внимание на положение стрелок: при выключенном питании стрелки указателей должны находиться ниже нулевой отметки шкалы, т.е. на механическом упоре. А при включении питания стрелки указателей давления масла и топлива должны установиться против нулевой отметки шкалы, а стрелки указателей температуры масла должны показывать температуру масла в данный момент времени.
ТОПЛИВОМЕРЫ И РАСХОДОМЕРЫ
Топливная система ВС — это комплекс оборудования, включающий топливные баки, систему подачи топлива к двигателям, систему управления и измерения топлива, расходомеры, систему заправки, средства сигнализации и др.
Контроль работоспособности топливомера, в том числе правильности его показаний, производится на земле при заправке самолета топливом по результатам сравнения показаний счетчиков на топливозаправщиках с показаниями топливомера. Правильность показаний топливомера контролируется в полете путем сравнения показаний топливомера и расходомеров, она может контролироваться также за счет сравнения показаний количества топлива по стрелке указателя «Сумма» с суммой показаний количества топлива в отдельных баках, группах и т. д. В некоторых топливомерах предусмотрен ручной ввод поправки на сорт заправленного топлива.
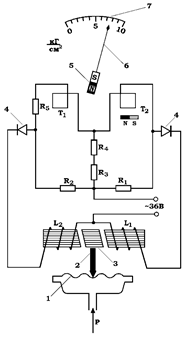
Рычажно-поплавковые топливомеры (СБЭС - суммирующий бензиномер электрический с сигнализацией) рис. 4.21.
Измеряют количество топлива в каждом баке и суммарное количество во всех баках (рис. 4.22). Принцип действия основан на измерении уровня (объема) топлива с помощью поплавка, плавающего на поверхности топлива и механически связанного с потенциометром R4 и мостовой схемой с логометром.
При измерении суммарного количества потенциометры всех баков включены последовательно. Датчик для обеспечения сигнализации критического остатка топлива имеет контактное устройство, связанное с осью подвижного контакта потенциометра. Погрешность составляет ~ 9%, значительная составляющая которой определяется изменением объема при изменении температуры.
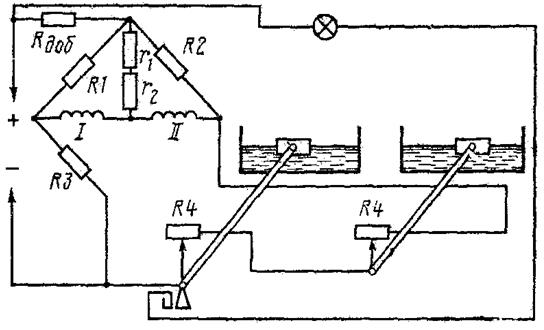
Рисунок 4.21 – Схема измерения рычажно-поплавкового топливомера
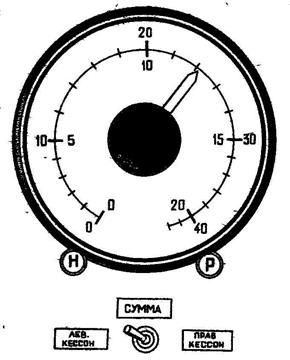
Рисунок 4.22 – Лицевые части топливомеров
Электроемкостные топливомеры.
Датчиком топливомера является система коаксиальных трубчатых конденсаторов, которые опускают в топливные баки рис. 4.23.
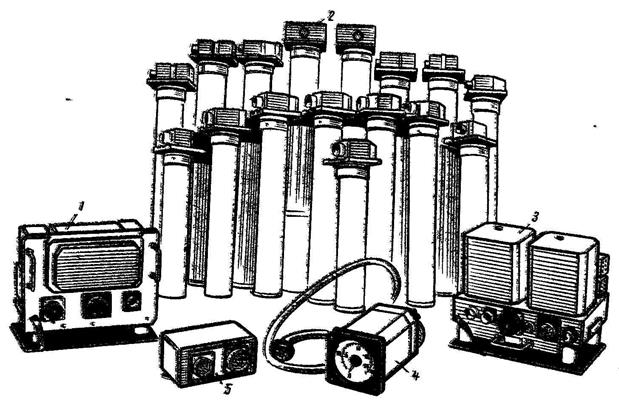
1 – блок центровки ; 2 – датчики емкостные; 3 – блок измерения;
2 – указатель; 5 – коммутационное устройство
Рисунок 4.2 3 - Комплект емкостного топливомера
Величина емкости конденсатора определяется высотой Н топлива, которое заполняет пространство между трубками конденсатора.
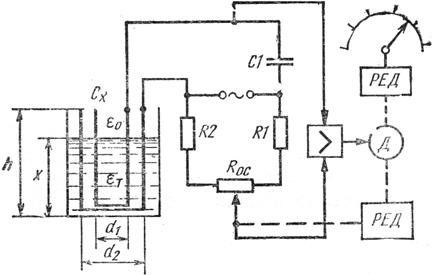
Рисунок 4.2 4 – Схема измерения емкостного топливомера
Емкость конденсатора, состоящего из двух коаксиальных металлических трубок диаметром d1 и d2 высотой h, определяется выражением:
 ,
,
где  - диэлектрическая проницаемость вакуума (воздуха);
- диэлектрическая проницаемость вакуума (воздуха);
- относительная диэлектрическая проницаемость вещества, заполняющего пространство между трубками.
При отсутствии топлива  равна 1, а при полностью заполненном баке равняется диэлектрической проницаемости топлива (≈ 2,2).
равна 1, а при полностью заполненном баке равняется диэлектрической проницаемости топлива (≈ 2,2).
В связи с этим по мере заполнения бака топливом емкость такого конденсатора увеличивается и таким образом ее измерение позволяет определить количество топлива в баке.
Диэлектрическая проницаемость топлива εтоплива зависит от плотности топлива, поэтому при повышении температуры увеличение объема топлива компенсируется уменьшением диэлектрической проницаемости. В связи с этим топливомер измеряет вес топлива, а не его объем. Емкость датчика пропорциональная количеству топлива, измеряется с помощью самобалансирующеюся моста переменного тока (рис. 4.24).
Во внутренней трубке помещен поплавковый датчик-сигнализатор с железным сердечником, который входит в катушки индуктивности, изменяет величину индуктивности и тем самым сигнализирует о полном заполнении бака или отсутствии топлива в баке. Такой сигнализатор позволяет осуществлять автоматическую заправку самолета и автоматический порядок расхода топлива из групп баков.
Лицевые части указателей емкостных топливомеров показаны на рис. 4.25.


Рисунок 4.25 – Лицевые части указателей емкостного топливомера
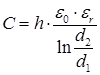
Расходомеры топлива измеряют часовой расход топлива двигателем.
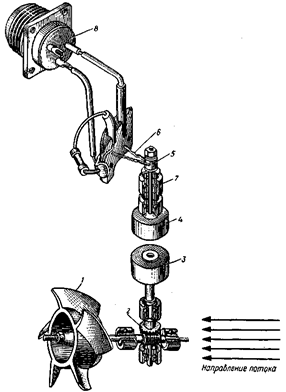

Рисунок 4.26 - Расходомер топлива
Принцип действия основан на использовании крыльчатки (турбинки), установленной в магистрали питания авиационного двигателя (рис. 4.26). Скорость вращения крыльчатки пропорциональна скорости потока топлива, то есть его расходу. Скорость вращения крыльчатки преобразуется с помощью электромагнитной муфты в перемещение стрелки прибора.
Расходомер воздуха
Расходомер воздуха служит для замера количества воздуха, поступающего в герметическую кабину (рис. 4.27). Он состоит из приемника (трубки Вентури) а и указателя (манометра) б.
Определение расхода воздуха производится путем измерения перепада давлений в узком и широком сечениях трубки Вентури. Чем больше расход воздуха, тем больше и перепад давлений. Перепад давлений в трубке Вентури воспринимается чувствительным элементом указателя – манометрической коробкой 1, внутренняя полость которой через трубопровод 2 сообщается с широкой частью трубки разрежения.
а – приемник; б – указатель ( 1 – манометрическая коробка; 2, 3 – трубопроводы; 4 – ушко;
5 – поводок; 6 – валик; 7 – сектор; 8 – стрелка; 9 – трибка, 10 – корпус)
Рисунок 4.27 - Расходомер воздуха
АВИАЦИОННЫЕ ЧАСЫ АЧС-1
Авиационные часы (рис. 4.30) предназначены для определения времени полета и для замера коротких промежутков временя, необходимых для выполнения навигационных и прочих расчетов.
Часы установлены на приборной доске и состоят из трех отдельных механизмов: механизма обычных часов для отсчета текущего времени суток; механизма времени полета для показания времени нахождения самолета в пути; механизма секундомера для замера и отсчета коротких промежутков времени.
На лицевой части часов находятся три шкалы. По внешней шкале обычных суточных часов перемещаются непрерывно три стрелки: часовая, минутная и секундная. По верхней шкале «Время полета» перемещаются две стрелки: часовая и минутная. По нижней шкале «Секундомер» перемещаются две стрелки: минутная и секундная.
Кроме того, на лицевую часть часов выведены две кнопки. Левая кнопка служит для завода часового механизма и установки текущего времени, а также для пуска в ход и остановки механизма времени полета.
Правая кнопка служит для пуска и останова механизма суточных часов, для включения и выключения механизма секундомера, а также для возврата секундной и минутной стрелки в исходное положение.

Рисунок 4.30 - Авиационные часы АЧС-1
ПРИБОРЫ САМОЛЕТА
Учебное пособие
Часть 1
(російською мовою)
Редактор: Сушкова Л.В.
Технічний редактор: Будулатій В.П.
Комп’ютерна верстка: Бур’янський С.В.
Формат 60х84 1/8 Ум. друк. арк. Тираж прим. Зам. №
Свідоцтво держ. реєстру ДК № 977 від 05.07.2002 р.
Видавництво Кіровоградської льотної академії НАУ
м. Кіровоград,
вул. Добровольського, 1,
т
ел.. 39-44-3
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ
КИРОВОГРАДСКАЯ ЛЕТНАЯ АКАДЕМИЯ
НАЦИОНАЛЬНОГО АВИАЦИОННОГО УНИВЕРСИТЕТА
Гаврилюк Б.А. Тузов В.А.
ПРИБОРЫ САМОЛЕТА
УЧЕБНОЕ ПОСОБИЕ
ЧАСТЬ 1
Кировоград 201 6
УДК 629.7.054
БКК 39.5
Га 12
А в т о р с к и й к о л л е к т и в:
Гаврилюк Б.А. – старший преподаватель – разделы 1, 4
Тузов В.А. – кандидат технических наук, доцент – разделы 2, 3
Р е ц е н з е н т:
Смирнов В.В. – старший преподаватель
Викладено опис пілотажно-навігаційних приладів і приладів контролю роботи двигуна й інших літакових систем. Дано характеристику, будову, особливості конструкції й порядок використання даного обладнання.
Призначено для курсантів і слухачів факультету льотної експлуатації й слухачів Кіровоградського льотного училища при вивченні авіаційного обладнання відповідно до навчальних програм «Прилади літака» і «Авіоніка» і відповідно до «Програми підготовки для одержання посвідчення приватного пілота (літак) PPL (A)».
Гаврилюк Б.А., …
Га 12 Приборы самолета: учебное пособие: часть 1 / Гаврилюк Б.А., Тузов В.А. – Кировоград: КЛА НАУ, 2016. – 91 с.
Изложено описание пилотажно-навигационных приборов и приборов контроля работы двигателя и других самолетных систем. Дана характеристика, устройство, особенности конструкции и порядок использования данного оборудования.
Предназначено для курсантов и слушателей факультета летной эксплуатации и слушателей Кировоградского летного училища при изучении авиационного оборудования в соответствии с учебными программами «Приборы самолета» и «Авионика» и в соответствии с «Программой подготовки для получения свидетельства приватного пилота (самолет) PPL (A)».
УДК 629.7.054
БКК 39.5
Рассмотрено и рекомендовано для издания и использования в учебном процессе решением кафедры авиационного оборудования, протокол № 6 от
20. 01. 2016 г.
© Гаврилюк Б.А., Тузов В.А., 2016
СОДЕРЖАНИЕ
ВВЕДЕНИЕ......................................................................................................... 5
1 АЭРОМЕТРИЧЕСКИЕ ПРИБОРЫ .............................................................. 6
1.1 Барометрические высотомеры .................................................................... 6
1.1.1 Механический барометрический высотомер.................................... 6
1.1.2 Электромеханические высотомеры ............................................... 10
1.1.3 Электронный барометрический высотомер ВБЭ-2 ....................... 13
1.1.4 Корректор высоты ......................................................................... 14
1.1.5 Вариометр ....................................................................................... 15
1.2 Указатели скорости ................................................................................... 16
1.2.1 Указатель индикаторной (приборной) скорости .......................... 17
1.2.2 Указатели истинной воздушной скорости ..................................... 19
1.2.3 Указатели числа Маха ........................................................................... 20
1.3 Автомат углов атаки и перегрузки (АУАСП) .......................................... 22
1.4 Системы питания приборов полным и статическим давлением ............... 26
2 ПРИБОРЫ ОТОБРАЖЕНИЯ ПРОСТРАНСТВЕННОГО
ПОЛОЖЕНИЯ САМОЛЕТА .......................................................................... 30
2.1 Гироскоп и его свойства ................................................................................................... 30
2.2 Электрический указатель поворота (ЭУП-53) ......................................... 32
2.3 Датчик угловых скоростей ........................................................................ 34
2.4 Авиагоризонты ........................................................................................... 35
2.4.1 Авиагоризонт АГБ-3К ............................................................................ 38
2.4.2 Авиагоризонт АГД-1 .............................................................................. 39
2.4.3 Резервный авиагоризонт АГР-74 ........................................................... 41
2.5 Блок контроля кренов БКК-18................................................................... 42
2.6 Центральные гировертикали ..................................................................... 42
3 КУРСОВЫЕ ПРИБОРЫ И СИСТЕМЫ ..................................................... 44
3.1 Магнитный компас ..................................................................................... 44
3.2 Гироиндукционный компас ГИК-1 ........................................................... 45
3.3 Гирополукомпас ГПК-52АП .................................................................... 50
3.4 Особенности построения курсовых систем............................................... 53
3.4.1 Курсовая система ГМК-1........................................................................ 53
3.4.2 Точная курсовая система ТКС-П .......................................................... 55
3.4.3 Курсовая система БСФК-1 ..................................................................... 57
3.5 Пути повышения точности курсовой информации ................................. 59
4 ПРИБОРЫ КОНТРОЛЯ РАБОТЫ
ДВИГАТЕЛЯ И САМОЛЕТНЫХ СИСТЕМ .................................................. 61
4.1 Манометры ................................................................................................ 61
4.2 Авиационные термометры ......................................................................... 64
4.3 Измерители частоты вращения (тахометры) ........................................... 70
4.4 Топливомеры и расходомеры .................................................................. 71
4. 5 Авиационные часы АЧС-1 ........................................................................ 77
4.6 Комбинированные приборы работы двигателя и самолетных систем ... 78
4.7 Системы регистрации полетной информации ....................................... 80
4.7.1 Трехкомпонентный механический самописец К3-63 .................... 82
4.7.2 Системы регистрации параметров на фотопленку световым
лучом САРПП-12 ..................................................................................... 84
4.7.3 Системы регистрации параметров самолета на магнитную ленту 86
4.7.4 Бортовое устройство регистрации с твердотельным накопителем 88
СПИСОК ИСТОЧНИКОВ ИНФОРМАЦИИ .................................................. 91
ВВЕДЕНИЕ
Приборы самолета являются неотъемлемой частью любого самолета.
Они позволяют правильно пилотировать самолет, решать навигационные задачи и контролировать работу двигателей и самолетных систем.
Как правило, приборы самолета подразделяются на следующие группы:
· Аэрометрические приборы, измеряющие параметры положения и движения самолета по параметрам набегающего воздушного потока воздуха. Это высотомеры, указатели скорости, указатели угла атаки и перегрузки, вертикальной скорости и другие.
· Приборы, контролирующие пространственное положение самолета относительно центра масс: авиагоризонты, курсовые системы, приборы для измерения угловой скорости вращения самолета относительно самолетных осей.
· Приборы контроля двигателей, в состав которых входят различные типы манометров, термометров, измерителей скорости вращения, а также приборы контроля работы самолетных систем: топливной масляной, гидравлической, кислородной, системы кондиционирования воздуха и других.
Данное учебное пособие предназначено для изучения авиационного оборудования по программе подготовки пилотов-любителей и курсантов для полетов на самолетах первоначального обучения. В этой связи в нем отсутствует описание современных навигационных систем и систем автоматического управления полетом (которые изучаются во второй части курса), а основное внимание уделяется изложению принципов построения и летной эксплуатации авиационных приборов электромеханического типа, которые устанавливаются на легких самолетах.
АЭРОМЕТРИЧЕСКИЕ ПРИБОРЫ
Аэрометрические приборы измеряют параметры полета самолета по свойствам окружающего воздушного потока.
БАРОМЕТРИЧЕСКИЕ ВЫСОТОМЕРЫ
Механический барометрический высотомер
Барометрический высотомер измеряет высоту от самолета до изобарической поверхности, давление которой установлено на шкале барометрических давлений прибора.
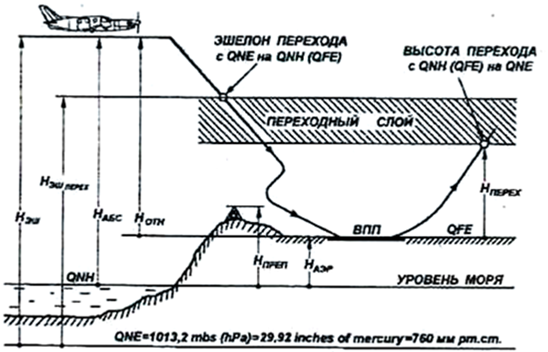
Рисунок 1.1 – Установка давлений на шкале барометрических высотомеров
В настоящее время на шкале барометрических давлений высотомера может быть установлено (рис. 1.1):
· давление на уровне аэродрома или порога ВПП, кодовое обозначение QFE (question field elevation – field elevation pressure). При этом давлении высотомер будет показывать высоту самолета относительно аэродрома. Если при этом самолет стоит на аэродроме, то стрелки высотомера будут находиться на нуле;
· давление, приведенное к среднему уровню моря стандартной атмосферы, кодовое обозначение QNH (question normal height – sea level pressure). При установке этого давления высотомер показывает высоту самолета относительно среднего уровня моря. Если самолет находится на аэродроме, то высотомер показывает высоту превышения аэродрома над уровнем моря;
· стандартное атмосферное давление при стандартной атмосфере. Кодовое обозначение QNE (question normal elevation – standart pressure 1013 гПа (mвs) или 29,92 дюйма рт. ст. (inches of mercury) или 760 мм. рт. ст.). При установке этого давления на высотомере прибор показывает высоту относительно изобарической поверхности с давлением 760 мм. рт. ст. При установке давления QNE все самолеты при полете по маршруту занимают вполне определенные высоты (эшелоны) относительно одного и того же уровня.
Принцип действия основан на измерении атмосферного статического давления воздуха на измеряемой высоте полета  , которое изменяется с высотой по определенному закону для стандартной атмосферы:
, которое изменяется с высотой по определенному закону для стандартной атмосферы:
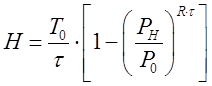 ,
,
где H – высота;
Ро = 760 мм. рт. ст. – статическое давление на уровне моря для стандартной атмосферы;
То = 15о С (288о К) – температура на уровне моря для стандартной атмосферы
R = 29,27 м/град – газовая постоянная;
τ = 6,5 10-3 град/м – температурный градиент высоты стандартной атмосферы.
Чувствительным элементом в механическом высотомере является анероидная коробка (см. рис. 1.2).
1 – шкала; 2 – стрелка; 3 – трибка; 4 – герметичный корпус; 5 – штуцер;
6 – подвижный центр; 7 – анероидная коробка
Рисунок 1.2 – Принципиальная схема барометрического высотомера
В герметичный корпус через штуцер поступает статическое давление из приемника воздушных давлений (ПВД) самолета. Внутри прибора установлена анероидная коробка, подвижный центр которой через передаточный механизм перемещает стрелку. Весь механизм разворачивается с помощью кремальеры для установки начального давления Р0 на шкале барометрического давления.
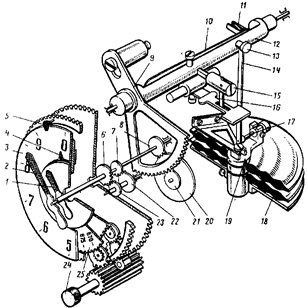

1 – стрелка, показывающая высоту в км; 2 – стрелка, показывающая высоту в м; 3 – шкала высот; 4, 5 – индексы; 6, 7, 20, 21 и 23 – зубчатые колеса; 8, 22 – трибки; 9 – зубчатый сектор; 10 – компенсатор второго рода; 11, 13, 15 – вилки; 12 – ось сектора; 14, 16 – тяги; 17 – компенсатор первого рода; 18 – блок анероидных коробок; 19 – подвижный центр; 24 – ручка кремальеры; 25 – шкала барометрических давлений
Рисунок 1.3 – Кинематическая схема барометрического высотомера ВД-10
Прибор имеет методические, аэродинамические и инструментальные погрешности. Методические обусловлены неполным соответствием изменения давления и температуры с высотой для реальной и стандартной атмосферы.
Аэродинамические погрешности обусловлены неточным измерением статического давления приемником воздушного давления. Учитывается таблицей поправок.
Инструментальные погрешности обусловлены неполным соответствием деформации анероидной коробки для каждой высоты. Также существует гистерезис коробки - разная ее деформация при наборе высоты и при снижении. Температурные инструментальные погрешности обусловлены изменениями размеров элементов передаточного механизма при изменении температуры.
Аэродинамические и инструментальные погрешности заносятся в таблицы поправок, которые находятся на борту самолета.
Дата: 2019-12-22, просмотров: 1372.