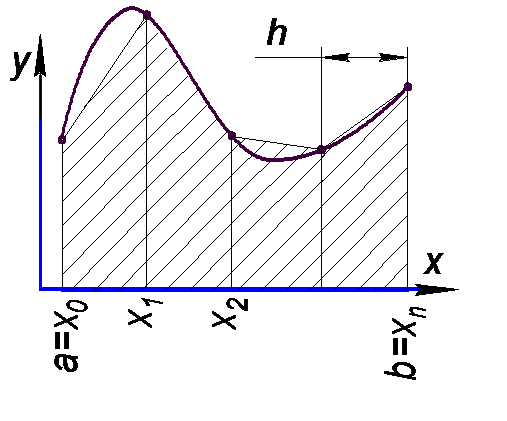
На каждом частичном интервале [xi , xi+1 ] заменяют аппроксимирующую функцию f(x) полиномом Лагранжа первой степени, т.е. применяют линейную интерполяцию. График функции в этом случае представляет ломаную линию, соединяющую точки (xi, yi ) (Рис.4). В этом случае площадь всей фигуры складывается из площадей элементарных прямоугольных трапеций, равных si=h(yi-1+yi)/2 (i=1,2,…,n) . Сумма этих площадей и представляет формулу трапеций
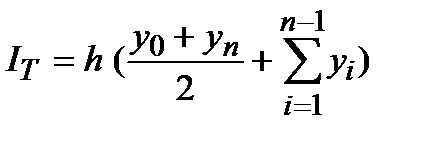 .
.
Вопрос 15.
Численное интегрирование. Метод Симпсона.
Отрезок интегрирования [a , b] разбивают на четное количество n=2m равных интервалов с шагом 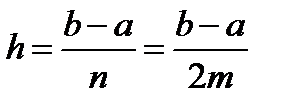
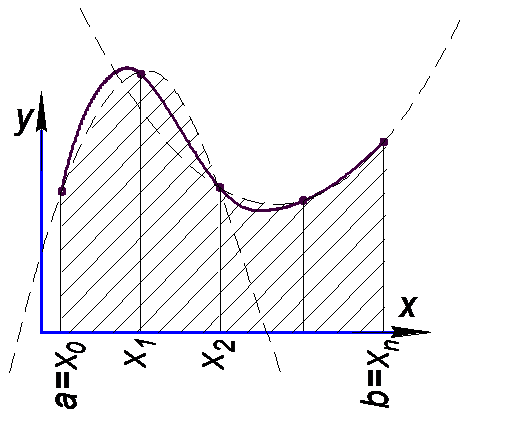
На каждых двух соседних интервалах [xi-1 , xi ] и [xi , xi+1 ] (i=1,2,…,n-1) , начиная с первого, заменяют функцию полиномом Лагранжа или Ньютона второй степени, т.е. параболой, проходящей через три точки с координатами
(xi-1, yi-1 ) , (xi, yi ) , (xi+1, yi+1 ) и с осью симметрии, параллельной оси ординат (Рис.5).
Площадь каждой пары интервалов равна si=(yi-1+4yi+yi+1)×h/2 . Сумма этих площадей и представляет формулу Симпсона

|
| Рис.5. Метод Симпсона |
Вопрос 16.Численные методы решения задачи Коши для ОДУ первого порядка. Метод Эйлера.
Метод Эйлера
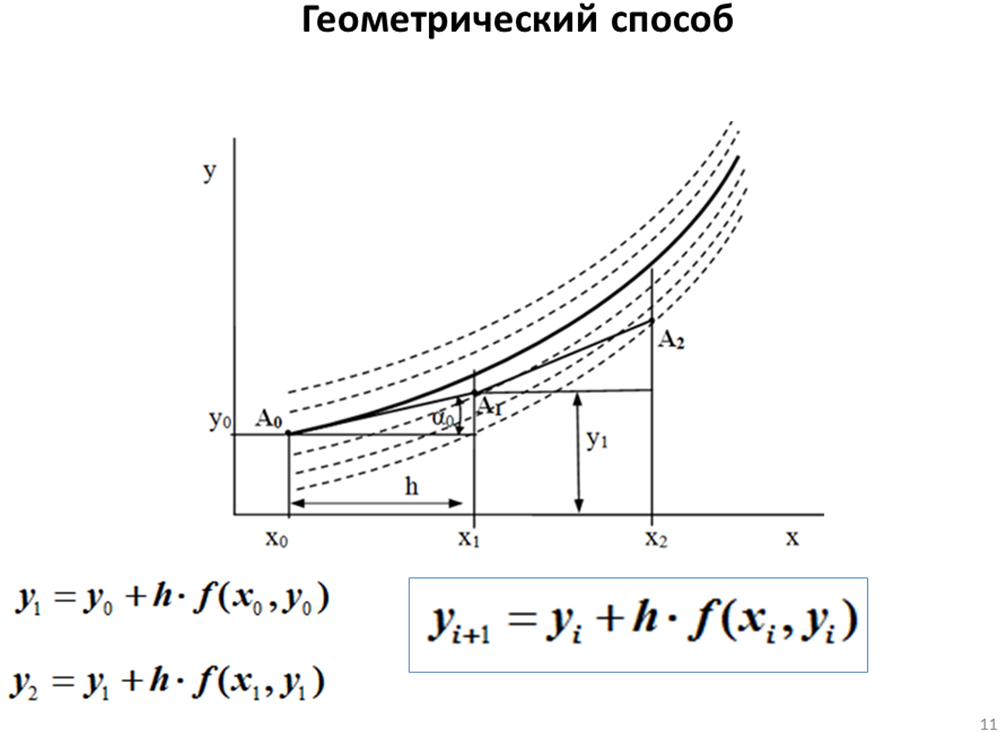
Семейство интегральных кривых (сплошная и пунктирные линии) представляет общее решение дифференциального уравнения.
Точное решение (сплошная линия) в соответствии с начальными условиями проходит через точку А0 с координатами (x0,y0). Заменим точное решение y =j(x) касательной к интегральной кривой в точке А0 при x=x0.
При x=x1 получим точку А1 с ординатой y1=y0+h×tga0. Получим y1=y0+h×f(x0,y0), где f(x0, y0) - функция, характеризующая наклон касательной в точке А0. Таким образом, приращение функции заменяем ее дифференциалом. Выполнив аналогичную процедуру в точке А1, найдем ординату точки А2 : y2=y1+h×f(x1, y1).
В общем случае дляi-ой точки можно записать
yi+1=yi+h× f(xi ,yi ).
Исходной точкой для каждого прямолинейного отрезка является конечная точка предыдущего. Наклон каждого отрезка ломаной определяется значением производной y’(xi)=f(xi,yi).
Вопрос 17.
Первый модифицированный метод Эйлера
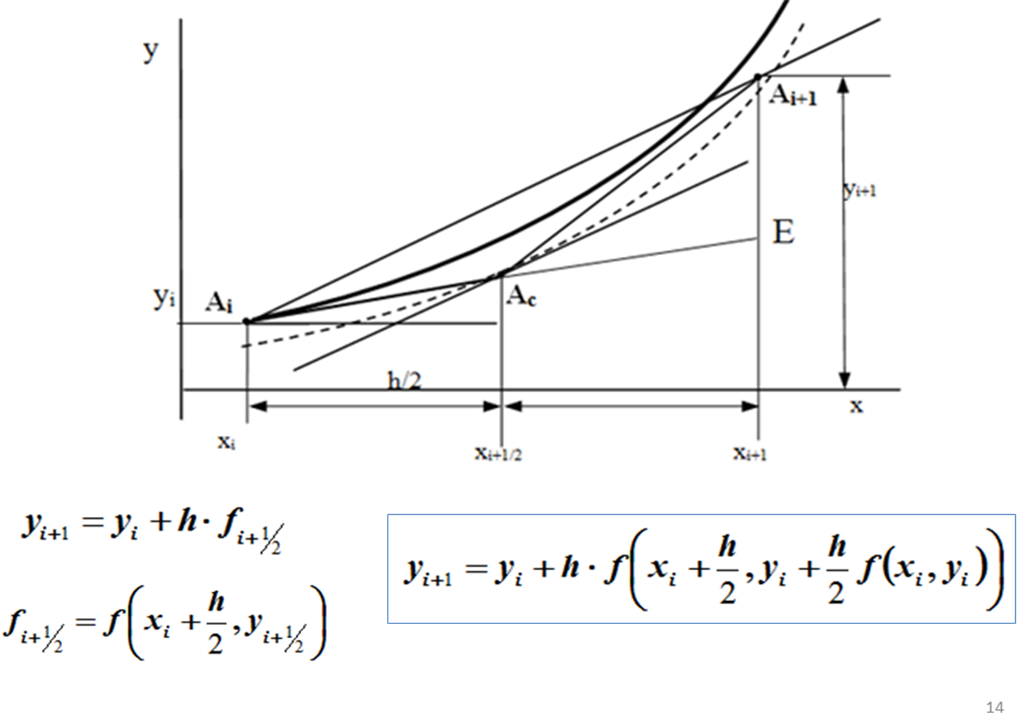
Сначала на каждом i -ом шаге, как и в методе Эйлера, используя наклон касательной в точке Ai (х= xi), вычисляют промежуточное значение yi+1/2 , но не на всей длине шага h , а на его половине в средней точке Ac (х=xi+1/2) каждого интервала [xi , xi+1]:
Затем находят направление касательной fi+1/2 в середине интервала в точке Ac (х=xi+1/2=xi+h/2) :

Это направление и принимают за окончательное при вычислении ординаты точки Ai+1 на всем интервале h от точки Ai: 
Подставив в последнюю формулу два предыдущих выражения, получим одну результирующую формулу для вычисления ординаты точки Ai+1:

Вопрос 18. Второй модифицированный метод Эйлера
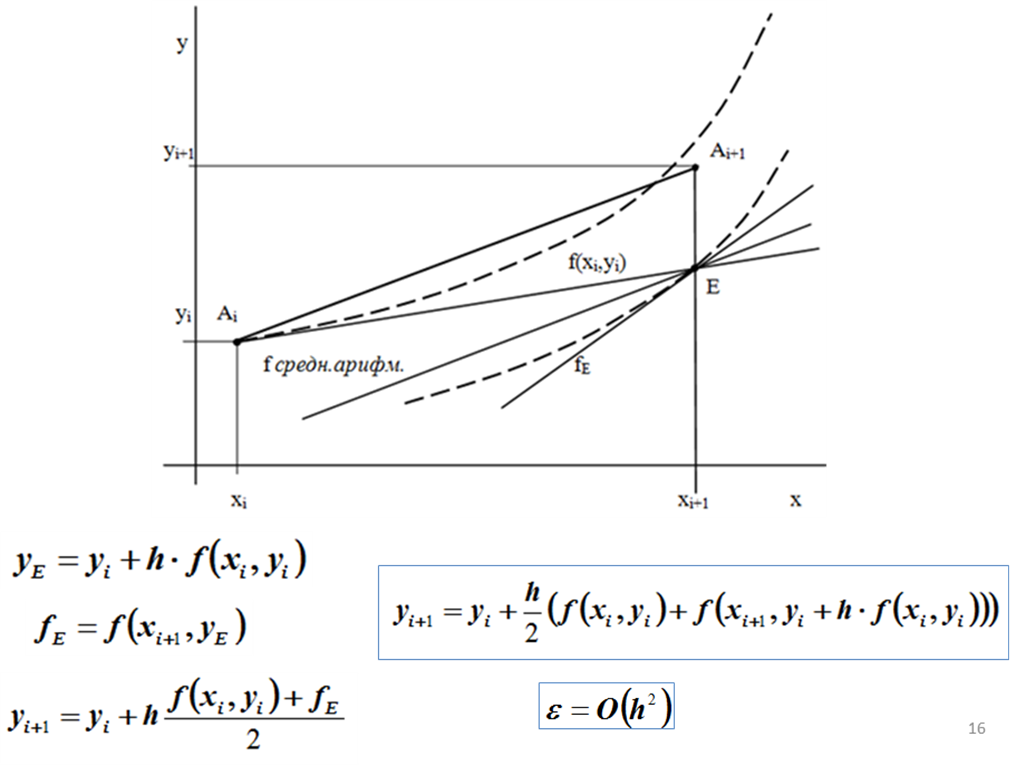
Сначала определяют значение ординаты yE в точке E как и в методе Эйлера (Рис.4.): yE=yi+h×f(xi, yi).
В точке E вычисляют направление проходящей через нее интегральной кривой fE=f(xi+1,yE).
В качестве окончательного значения направления кривой на всем отрезке h принимают среднее арифметическое значение от направлений f(xi , yi) и fE , т.е. ординату точки Ai+1 вычисляют по формуле
 .
.
Подставив в последнюю формулу два предыдущих выражения, получим одну результирующую формулу для вычисления ординаты точки Ai+1:
 .
.
Локальная погрешность обоих модифицированных методов О(h3) , глобальная - О(h2) .
Все методы Эйлера являются явными и одношаговыми , поскольку для вычисления последующего приближения необходимо знать только значение функции f(x,y) на предыдущем шаге.
Вопрос 19.Метод Рунге-Кутты.

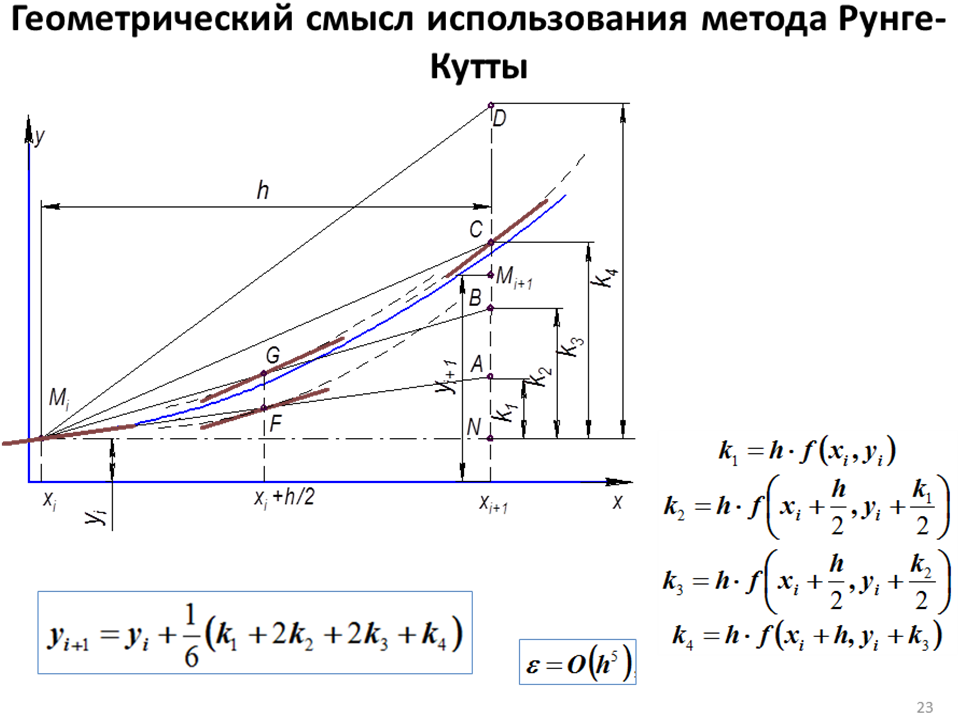
1. Из точки Mi с координатами (xi,yi) строят касательную в направлении, определяемым углом α1 , для которого tg α1=f(xi,yi) и находят точку A.
Расстояние NA будет k1= hf(xi,yi).
2. При x=xi+h/2 в точке F вычисляют наклон второй касательной с углом α2 (касательная показана утолщенным отрезком) tg α2=f(xi+h/2,yi+k1/2). С этим наклоном проводят прямую из точки Mi и получают точку B .
При этом приращение будет NBk2=hf(xi+h/2,yi+k1/2).
3. Также при x=xi+h/2, но уже в точке G пересечения прямой Mi B с одной из кривых семейства, вычисляют ее наклон (касательная показана утолщенным отрезком) как tgα3=f(xi+h/2 , yi+k2/2). С этим наклоном проводят прямую из точки Mi и на длине шага h получают приращение NC, равное k3=hf(xi+h/2,yi+k2/2).
Второй и третий этапы представляют не что иное, как модифицированные методы Эйлера.
4. При x=xi+1 в точке С пересечения прямой MiC с одной из кривых семейства вычисляют ее наклон (касательная также показана утолщенным отрезком) как tgα4=f(xi+h , yi+k3). С этим наклоном проводят прямую из точки Mi и на длине шага h получают приращение ND, равное k4=hf(xi+h,yi+k3).
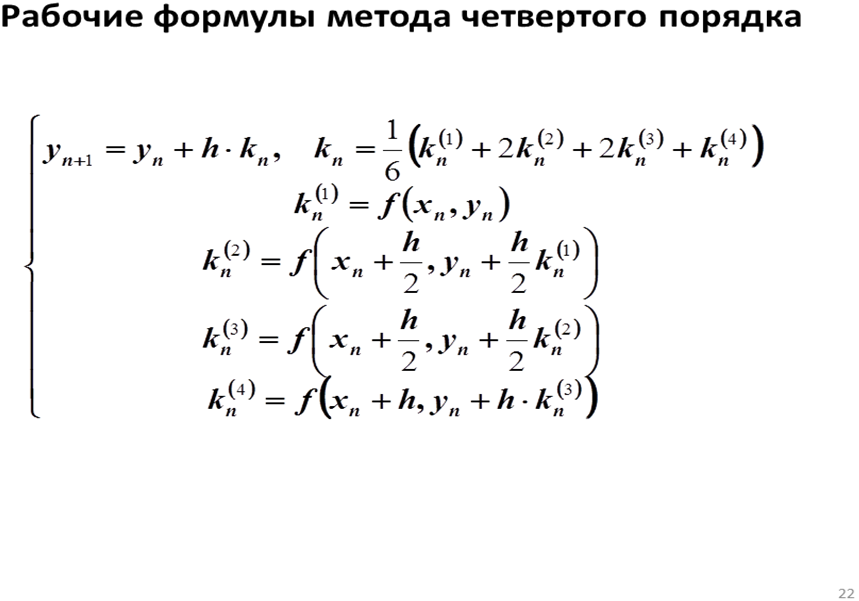
5. Окончательно приращение ординаты точки Mi+1 вычисляют как средневзвешенную величину приращений k1, k2, k3, k4 , с весовыми коэффициентами  соответственно
соответственно

Где k1= hf(xi,yi).
k2=hf(xi+h/2,yi+k1/2).
k3=hf(xi+h/2,yi+k2/2).
k4=hf(xi+h,yi+k3).
Вопрос 20.Численные методы решения задачи Коши для системы ОДУ первого порядка.
Определение :
Система дифференциальных уравнений называется нормальной , если все уравнения системы разрешены относительно старшей производной.
Рассмотрим систему ДУ вида :
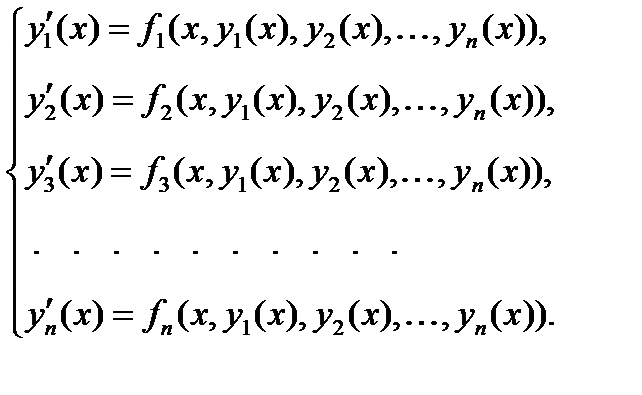
 - искомые функции на промежутке [x0,X]
- искомые функции на промежутке [x0,X]
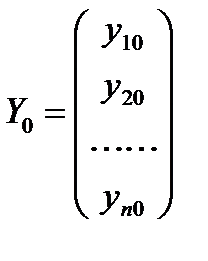
Заданы начальные условия :

Введем понятие вектор-функции :
 ,
,  ,
, 
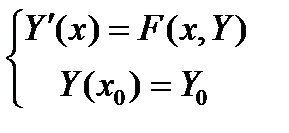
Тогда имеем :
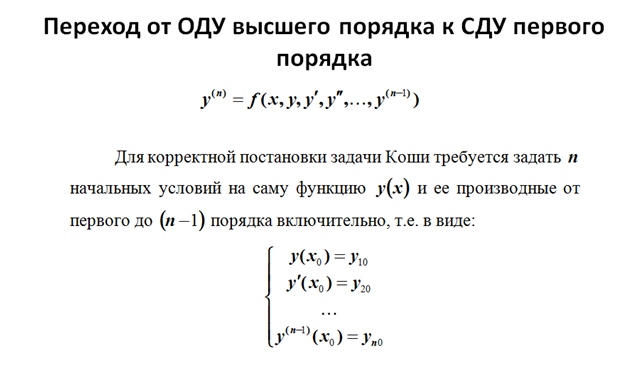
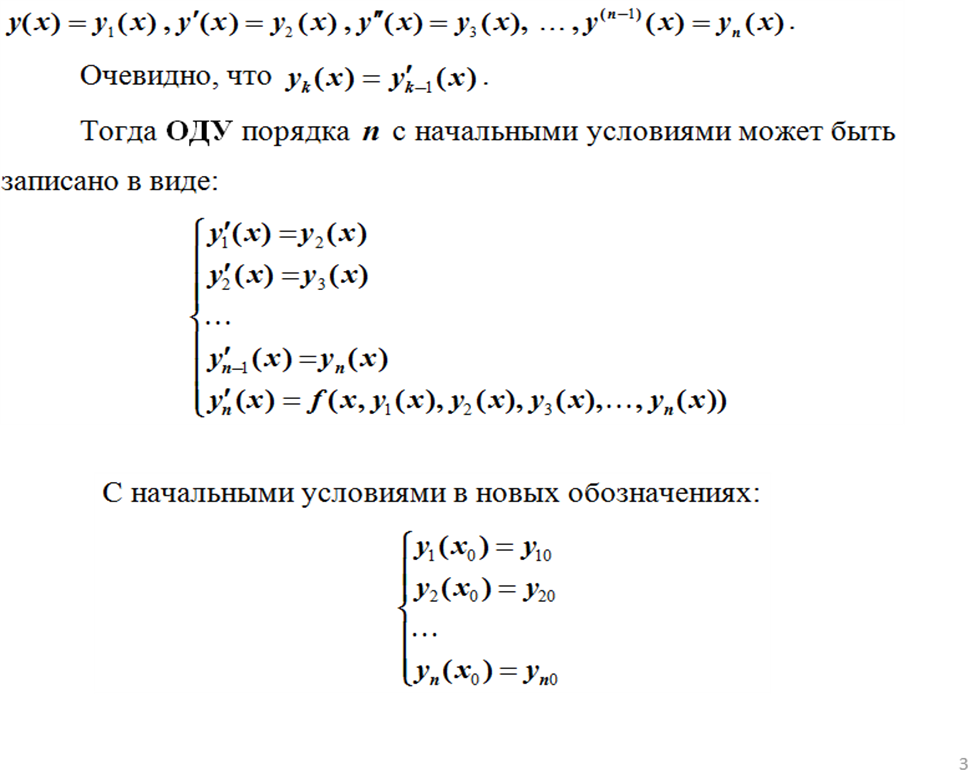
Вопрос 21. Решение ОДУ высших порядков.
Дата: 2016-10-02, просмотров: 300.