Составление кинематической схемы привода
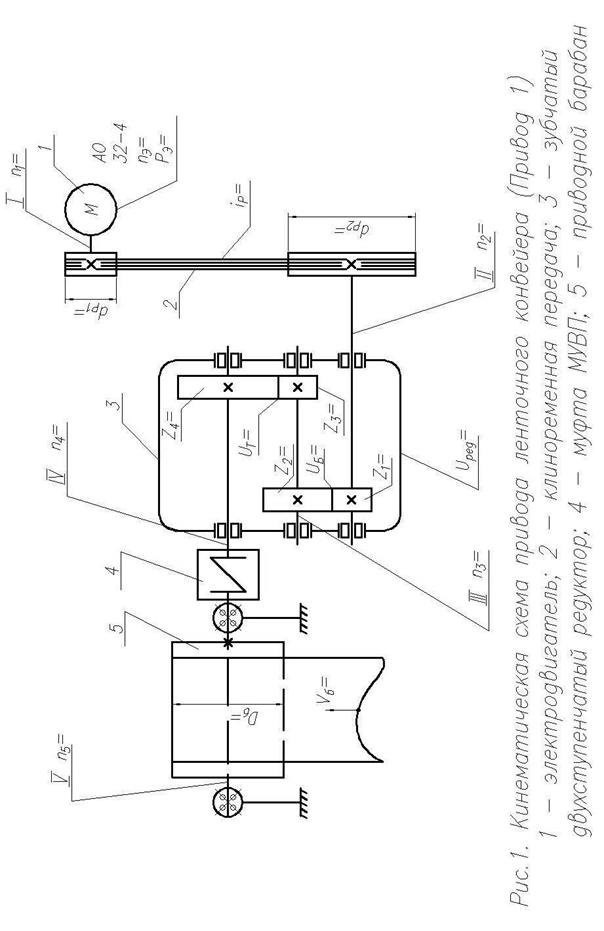
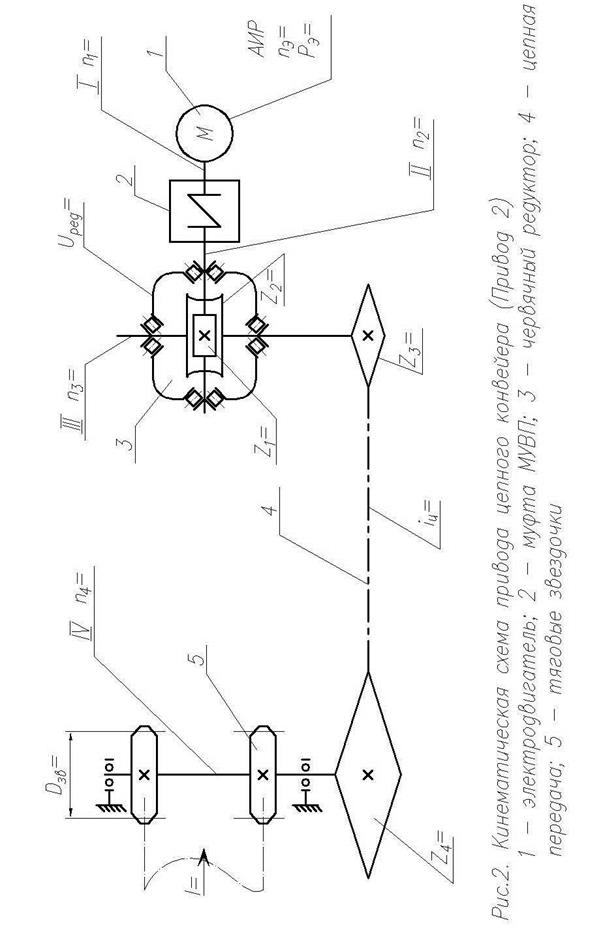
Кинематическая схема привода дает представление о взаимодействии его конструктивных элементов и наглядно показывает пути поступенчатой передачи механической энергии от двигателя к исполнительному органу. Основные элементы схемы составляются в условных ГОСТовых обозначениях по методике, изложенной в [1, 2]. Кинематическая схема любого привода выполняется без определенного масштаба по размерам, удобным для изображения схемы на листе бумаги (в лабораторной работе – на развороте ученической тетради по размеру, близкому к формату А4), по образцу, приведенному на рис. 2 или рис. 3. На рис. 2 изображена кинематическая схема ленточного конвейера, на рис. 3 – цепного конвейера. После составления «скелета» кинематической схемы заданного привода необходимо, начиная с вала электродвигателя, обозначить все валы привода римскими цифрами (I, II, III, IV и т.д.). Затем (после измерений и расчетов) на схеме над полками линий-выносок указываются основные геометрические и кинематические (скоростные) параметры для отдельных элементов привода с их индексами, значениями и размерностями. Для исполнительного органа – барабана или тяговых звездочек – необходимо указать значения их диаметра (  ,
,  ), их линейной (окружной) скорости движения
), их линейной (окружной) скорости движения  .
.


 2.2. Определение основных параметров привода
2.2. Определение основных параметров привода
Каждой бригаде необходимо определить для заданного привода следующие группы основных параметров:
· Основные геометрические параметры – диаметры (D и d), межосевые расстояния (  ), монтажные высоты (H и h).
), монтажные высоты (H и h).
· Основные кинематические параметры – передаточные числа (u или i), частоты вращения (n), окружные скорости (V).
Определение основных геометрических параметров привода
Основные геометрические параметры (размеры) приводов определяются в миллиметрах с помощью рулетки, линейки и (или) штангенциркуля.
В приводе ленточного конвейера (Привод 1) необходимо определить следующие размеры:
– диаметры приводного барабана ;
– расчетные диаметры ведущего (  ) и ведомого (
) и ведомого (  ) шкивов клиноременной передачи:
) шкивов клиноременной передачи:
 ,
,
 ,
,
где  и и  – –
| наружные диаметры ведомого и ведущего шкивов, мм; |
 – –
| толщина ремня, мм, измеряется штангенциркулем; |
– межосевое расстояние зубчатого редуктора (  ) (между осями входного и выходного валов редуктора);
) (между осями входного и выходного валов редуктора);
– расстояние (высоту) от опорной плоскости рамы до оси вращения вала двигателя (  );
);
– расстояние (высоту) от опорной плоскости рамы до оси вращения приводного вала (  );
);
– расстояние (высоту) от опорной плоскости рамы до оси входного вала редуктора (  );
);
– расстояние (высоту) между осями вращения вала электродвигателя и приводного вала (  ) по формуле
) по формуле
 , мм.
, мм.
В приводе цепного конвейера (Привод 2) необходимо определить следующие размеры:
– наружный диаметр тяговых звездочек  , ;
, ;
– расчетный диаметр тяговых у звездочек:
 ,
,
где  – высота зуба тяговой звездочки, мм.
– высота зуба тяговой звездочки, мм.
– межосевое расстояние цепной передачи  ;
;
– наружные диаметры ведущей (  ) и ведомой ( ) звездочек открытой цепной передачи;
) и ведомой ( ) звездочек открытой цепной передачи;
– расчетные диаметры ведущей  и ведомой
и ведомой  звездочек:
звездочек:
 ,
,
 ;
;
– межосевое расстояние червячного редуктора  (между осями червяка и червячного колеса);
(между осями червяка и червячного колеса);
– расстояние (высоту) от опорной плоскости рамы до оси вращения вала электродвигателя – ;
– расстояние (высоту) от опорной плоскости рамы до оси вращения приводного вала – ;
– расстояние (монтажная высота) между осями вращения вала электродвигателя и приводного вала – , мм.
Определение основных кинематических параметров привода
Дата: 2016-10-02, просмотров: 302.