Формирование последовательности сборки и сварки конструкции:
После завершения анализа конструкторской документации первым и важным этапом разработки технологии изготовления сварной конструкции является ее деление на сборочные единицы. При этом закладываются основы всей последующей технологии, по которой отдельные узлы будут изготовляться последовательно (или параллельно) на отдельных рабочих местах с использованием соответствующих сборочно-сварочных приспособлений, оснастки и сварочного оборудования. В принятии решений имеется большая доля творческой составляющей, и, как правило, наиболее квалифицированные технологи могут предложить рациональную схему организации изготовления конструкции. При этом учитывается много факторов, связанных с конструктивными особенностями изделия, серийностью производства, а также возможности максимального использования уже существующих приспособлений, сроков, отведенных на подготовку производства и др. Процесс формирования структуры сборки не должен выполняться в автоматическом режиме, а интерактивные технологии призваны обеспечить высокое быстродействие выполнения всех операций и исключение всех возможных технических ошибок. Более того, уже в процессе разработки технологии часто возникает необходимость изменения принятой первоначально последовательности выполнения сборочно-сварочных операций. Это может быть связано с возникающими трудностями сборки, точного базирования заготовок, ограниченной доступностью сварных швов, с необходимостью выделения дополнительных сборочных узлов для уменьшения технологического времени и синхронизации ритма работы оборудования поточных или автоматических технологических линий.
В случае изменения порядка сборки и сварки узлов при частично уже разработанной и сформированной технологии, и особенно если такие изменения произошли в завершающей стадии работы, сформированные блоки технологического процесса, непосредственно не затронутые изменениями, должны сохраниться и не переформировываться вновь. Достигается это специальной системой привязки данных технологии к структуре сборочных единиц.
Технически разработку последовательности сборки и сварки конструкции удобно выполнять путем видоизменения (редактирования) исходной структуры — структуры конструкторской документации. В качестве примера для пояснения технологии формирования последовательности выполнения сборочно-сварочных операций воспользуемся уже рассмотренной конструкцией переходника. Если в конструкторской документации на это изделие имеется только один сборочный чертеж, на котором изображено все изделие, то автоматическая обработка данных конструкторской спецификации сформирует дерево ее структуры. Для упрощения схемы здесь пока не представлены сварные швы.
В случае если в конструкторской документации на это изделие помимо основного сборочного чертежа имеются отдельные сборочные чертежи на цилиндр, диффузор, короб, то система автоматически сформирует структуру документации. Естественно, ни первая, ни вторая из автоматически сформированных структур документации не обязана быть структурой процесса изготовления — структурой сборки конструкции в производстве, хотя, как правило, конструктор при выполнении проекта определяет все отдельные сборочные элементы.

Рис.6.1 - Вариант структуры сборки изделия «переходник», включающий дополнительную технологическую сборку
Технолог уточняет и окончательно определяет структуру сборки.
Предположим, что в рассматриваемом примере процесс изготовления должен проходить так, как показано на рис.6.1. Можно видеть, что на окончательную сборку поступают три сварных узла: цилиндр, диффузор и короб, однако сам диффузор будет собираться и, возможно, свариваться не сразу из четырех отдельных деталей, а из двух одинаковых технологических подсборок. При этом каждый из двух технологических сварных узлов будет включать в себя одну боковину правую и одну боковину левую, свариваемые швом № 2. Два собранных и сваренных технологических узла должны
поступить на сборку и сварку одного диффузора, где будут выполнены два сварных шва № 3.
Для выполнения операций преобразования исходной структуры в структуру сборки в автоматизированной системе разработки технологии имеется двухоконная экранная форма. Каждой позиции дерева структуры в правом окне соответствуют ее характеристики в левом окне, причем разные для сборочных единиц, деталей и сварных швов. Для сборочного узла это номер спецификации, если он имеется, масса (в кг), количество таких элементов в сборке более высокого уровня и общее количество таких узлов во всей конструкции. Для отдельной детали помимо такого же набора данных дополнительно указана марка материала.
При необходимости выделения в выбранной сборке новой дополнительной сборочной единицы на экране (в дополнительном окне) следует ввести наименование вновь создаваемого технологического узла и предполагаемое количество таких элементов. После ввода этой информации в схеме структуры появляется новая строка с данными созданного технологического узла и обновляются связи между всеми элементами. Для перемещения в эту новую сборку нужного количества деталей их наименования помечаются на схеме с помощью мыши. Выбранные детали отображаются в окне.
После перемещения деталей измененная структура сразу видна на экране, при этом оставшиеся детали сохраняются на своих местах и все количественные и весовые характеристики всех элементов уже пересчитаны. Точно так же перемещаются в структуре любые сборочные единицы и сварные швы, причем технические ошибки исключены. Можно видеть, что изложенная процедура изменения структуры сборки конструкции напоминает работу программы «проводник» в Windows, с дополнительным анализом количественных показателей в многоуровневой системе. Следует заметить, что происшедшие изменения при редактировании структуры сопровождаются существенным обновлением связей в оперативной базе данных и, как будет показано далее, это касается не только сборочных единиц, деталей и сварных швов, но и блоков технологических процессов, «привязанных» к своим сборкам.
Представленный процесс объединения и переноса деталей с образованием новой сборочной единицы или перемещение деталей в другие уже существующие сборки может выполняться и в обратном направлении, когда отдельные сборочные узлы могут быть ликвидированы полностью, их детали или узлы войдут в состав других элементов. Разработанная технологами структура сборки корпуса барабана шахтной мельницы массой свыше 13 т выполнена применительно к единичному производству изделия с использованием преимущественно ручной и полуавтоматической сварки.
Наличие структуры сборки сварной конструкции позволяет приступить к формированию технологических процессов изготовления отдельных сборочных единиц, однако это возможно только для тех сборок, в которые входят одни детали или детали и сборочные единицы, для которых технологический процесс уже сформирован.
Формирование маршрутной и операционной технологии изготовления отдельной сборочной единицы, ч.1
Спецификой сварочной технологии является большой объем и разнообразие данных по каждому сварному шву и часто большое количество сварных швов в сварной конструкции или в узле.
Естественно, как это уже отмечалось ранее, для работы автоматизированной системы разработки сварочной технологии необходим полный объем всех данных о швах как по каждому отличающемуся шву (кроме его длины), так и по количеству одинаковых швов. Однако если по деталям и сборочным единицам исходные данные имеются в конструкторской спецификации, то данные о сварных швах собирать технически сложнее.
Часть этих данных имеется на чертежах. Здесь уместно обратить внимание на тот факт, что все основные принципиальные решения по сварным швам принимает не технолог, а конструктор — проектировщик изделия. Именно он выполняет расчеты на прочность и единолично несет полную ответственность за сварную конструкцию. Конструктор определяет метод сварки, тип соединения, сечение шва, разделку кромок, необходимость зачистки и другие параметры, способ сварки — ручная, автоматическая.
Все эти принятые конструктором решения поступают к технологам и контролерам из данных на обозначениях сварных швов на чертежах. Примеры обозначений сварных швов по ГОСТ 2.312—90 показаны в табл. 6.1.
Таблица 6.1 - Примеры условных обозначений сварных швов

Таблица 6.2 - Условные обозначения сварных соединений
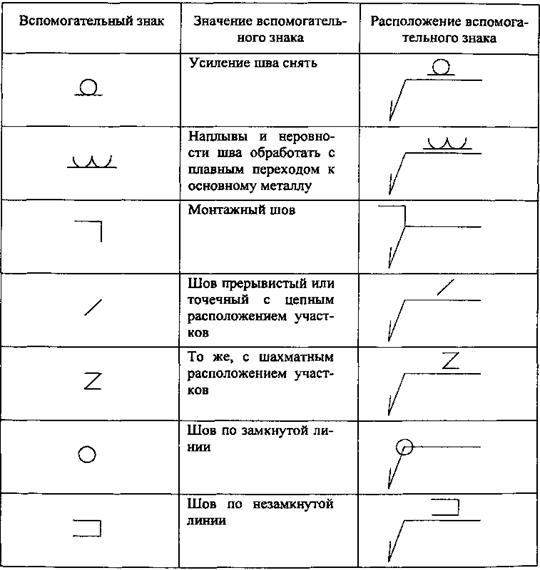
Структура данных в обозначениях сварных швов содержит:
• обозначение метода и способа сварки (например, автоматическая дуговая сварка в углекислом газе);
• размеры катетов угловых швов;
• длины участков прерывистых швов;
• дополнительную информацию для технологов, отображаемую с помощью условных обозначений, показанных в табл. 6.2.
Данные стандарты на типы и конструктивные элементы сварных соединений устанавливают геометрию разделки свариваемых кромок, размеры и допустимые отклонения на сборку стыка (эти параметры будут проверяться контролером перед выполнением сварки стыка), а также контролируемые размеры геометрии готового шва. Пример данных стандарта на сварку в защитных газах для стыкового шва типа СП приведен в табл. 6.3.
Таблица 6.3 - Вид соединения и шва СИ
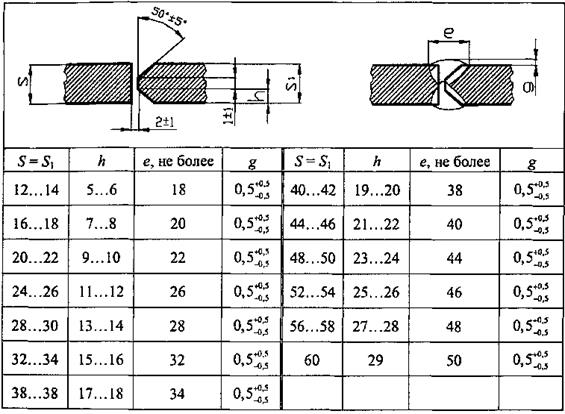
Из нее следует, что для конкретной толщины свариваемого металла, которая указывается в сборочном или деталировочном чертеже, имеются данные, необходимые для формирования технологии сборочно-сварочных операций.
Весь процесс формирования и обработки данных по каждому сварному шву можно представить в виде структурной схемы (рис. 6.2). Первые два этапа — это формирование данных, определяемых конструктором, последующие этапы связаны с работой и решениями технологов.
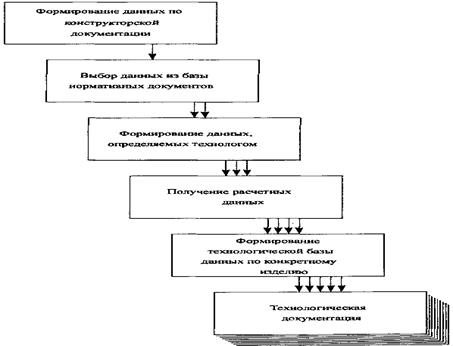
 Рисунок 6.2 - Этапы формирования технологической документации
Рисунок 6.2 - Этапы формирования технологической документации
Пример конкретного набора данных по одному сварному шву приведен в табл. 5.4, из которой следует, что по каждому сварному шву необходимо в процессе разработки технологии из разных источников собрать большой объем данных. Необходимо отметить, что представленных в этой таблице данных достаточно для формирования технологии сварки, но не достаточно для разработки технологии сборки под сварку, поскольку для этого надо знать массы и габариты сварных узлов.
Таблица 6.4 - Сведения о сварном шве для операции сборки и сварки
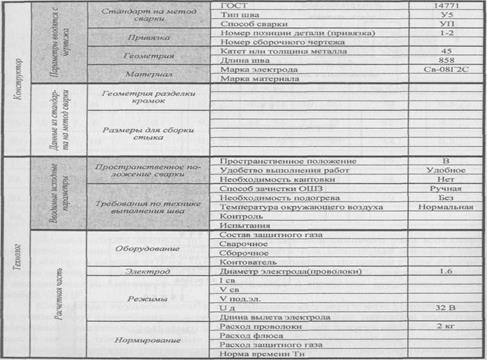
Полный объем данных по сварным швам для сварного узла или сварной конструкции можно условно представить как некоторый массив записей, в котором каждая строка содержит информацию по одному шву и количество записей соответствует количеству сварных швов. Подготовка данных и заполнение полей такой базы — основная и наиболее трудоемкая часть любой САПР.
Лекция 7. Содержание работ и структура автоматизированной системы проектирования
Применение роботов в сварочном производстве — путь эффективного решения проблем автоматизации сварочных операций. Прежде всего это связано с повышением качества выполнения работ, недоступного ручным технологиям. Понятны очевидные и весомые достоинства роботизированной сварки:
• высокая точность перемещений сварочного инструмента и траектории наложения сварных швов;
• высокая точность поддержания всех технологических параметров сварки;
• «неутомляемость» и способность работать круглые сутки.
По сравнению с другими путями автоматизации сварочных работ, такими, как применение автоматических многоточечных машин в контактной сварке, сварочных автоматов и автоматических установок при дуговой сварке или термическом резании, идея роботизации выгодно отличается гибкостью переналадки оборудования и технологии, в том числе и возможностью постоянного изменения программ при последовательной сварке весьма различных изделий.
Недостатки идеи роботизации сварочных технологий также имеются, и в большинстве практических случаев они делают нереальной нарисованную выше идиллическую картину. Эти недостатки прежде всего связаны с чрезвычайно высокой стоимостью сварочных роботов для дуговой и контактной сварки и другого оборудования, необходимого для их успешной работы в составе сварочных роботизированных технологических комплексов (РТК). Это управляемые двух- и трехстепенные манипуляторы изделий, гораздо более дорогой сварочный инструмент. Для успешной работы сварочных РТК предъявляются существенно более высокие требования к сварочным горелкам для дуговой сварки в защитных газах, механизмам подачи сварочной проволоки, к самим сварочным проволокам, качеству их покрытий, качеству намотки на катушки и т. д.
Другая группа проблем промышленного использования сварочной робототехники связана с большими затратами средств и времени на подготовку роботизированного сварочного производства. К ним можно отнести более высокие требования к проектированию сварной конструкции, предназначенной для изготовления с применением роботов, проектирование сборочно-сварочных приспособлений и сварочного инструмента, пригодных для работы в составе сварочных РТК для изготовления конкретного изделия. Много времени занимают программирование (обучение) сварочных роботов, оптимизация и синхронизация их работы применительно к жестким требованиям автоматических производственных линий.
Вместе с тем и первая, и, тем более, вторая группа проблем, препятствующих широкому использованию сварочной робототехники в отечественном сварочном производстве, может быть решена. Что касается чрезмерно высокой стоимости сварочных роботов, то это связано с тем, что легкие роботы для дуговой сварки в России не производят. Роботы для контактной сварки производят по лицензии фирмы KUKA, но системы управления поставляются из-за рубежа. В настоящее время имеется возможность организовать на отечественных заводах серийное производство легких сварочных роботов для дуговой сварки, термического резания, окраски. Разработаны и отечественные недорогие версии систем управления роботами, реализованные с использованием массовых и дешевых плат персональных компьютеров и работающие под управлением универсальных операционных систем.
Проблема резкого сокращения стоимости и сроков конструктивно-технологической подготовки роботизированного производства успешно решается за счет возможного широкого применения рассматриваемых ниже систем компьютерного проектирования и моделирования работы РТК. Такие системы давно и широко применяются за рубежом, имеется успешный опыт их использования и на крупных отечественных заводах.
Возможность и необходимость широкого применения роботизированных сварочных технологий подтверждается опытом автомобильной промышленности, в которой сварочные роботы контактной сварки составляют основу кузовного производства. Многие сотни таких роботизированных рабочих мест имеются на каждом автомобильном заводе.
В роботизации дуговой сварки успехи гораздо более скромные, однако неожиданно появилось понимание того, что, как ни странно, многие сварные конструкции сегодня вообще не могут быть изготовлены иначе, чем с применением роботизированной дуговой сварки. Ранее некоторые конструкции могли быть изготовлены с использованием ручной (или полуавтоматической) сварки. При постоянном повышении требований точности размеров, стабильные сварочные деформации, обусловленные большим количеством сварных швов в принципе не могут быть обеспечены при работе сварщиков-ручников. В гл. 8 показано, что по сравнению с ручной сваркой роботизированные сварочные технологии позволяют многократно уменьшить разброс размеров сварных конструкций.
Основным потребителем промышленных роботов в настоящее время является автомобильная промышленность, где они преимущественно используются для точечной контактной (около 80 %) и дуговой сварки. Условия жесткой конкуренции требуют от производителей как повышения качества продукции, снижения ее себестоимости, так и сокращения сроков подготовки производства. В связи с этим в автомобилестроении широкое распространение получают универсальные и специализированные САПР, которые позволяют связать воедино и автоматизировать процесс разработки конструкции, подготовку производства и само производство. Благодаря этому на ведущих автомобильных фирмах сроки освоения новой модели (от дизайнерской модели до выпуска с конвейера) сократились до одного года — полутора лет.
При традиционном проектировании роботизированных производств, когда указанные САПР не используются, наибольшие затраты связаны с устранением ошибок в расположении роботов. Обычно такие ошибки выявляются уже после того, как оборудование изготовлено в металле. При этом оказывается, что некоторые точки (швы) являются недоступными для сварки вследствие столкновений технологического инструмента с деталью либо недостижимыми (при требуемой ориентации инструмента) в связи с ограничениями рабочего пространства робота. Поэтому в некоторых руководствах по проектированию РТК сварки рекомендуется предусмотреть целую сетку крепежных отверстий для основания робота, что позволяет корректировать его расположение на фундаменте при наладке.
Большой трудоемкостью характеризуется и процесс программирования РТК, при котором технологические операции представляются в виде последовательности движений робота и позиционера. Обычно каждое элементарное движение определяется как переход из одной опорной точки траектории в другую. Опорные точки задаются шестью параметрами (три декартовы координаты и три угла ориентации либо шесть координат звеньев). Для каждого участка траектории задаются также способ интерполяции (линейная или круговая в системе координат звеньев) и максимальные значения скорости и ускорения. Кроме того, в программу включаются команды управления технологическим инструментом и команды, определяющие способ сопряжения соседних участков траектории. При подготовке управляющих программ для РТК используют два основных метода — ручное обучение и автономное программирование. В первом случае подготовка программы производится непосредственно на РТК, в режиме on-line: оператор при помощи пульта управления или задающей рукоятки последовательно переводит робот из одной опорной точки в другую, записывая в каждой из них информацию о координатах и выполняемых действиях. Во втором случае программа создается без использования робота (в режиме off-line), а координаты опорных точек рассчитываются по чертежу или математической модели.
Программирование путем обучения на уже установленном оборудовании дает удовлетворительные результаты лишь в условиях массового производства и при обработке простых деталей. Для сложных деталей, таких, как сложная рама автомобиля, время программирования может достигать нескольких месяцев. В некоторых случаях, например при роботизированной сварке седлообразных патрубков, ручное обучение вовсе не позволяет достичь требуемого качества технологического процесса. Поэтому более перспективным является off-line-программирование, к числу достоинств которого относится возможность подготовки управляющих программ в процессе проектирования технологических линий (задолго до того, когда роботы будут установлены в цехе) либо в процессе производства другой детали без остановки РТК (при смене выпускаемого изделия). Однако off-line-программирование требует решения ряда новых задач, которые не возникают при ручном обучении. К их числу относится обеспечение адекватности математических моделей, которая достигается путем калибровки — точной доводки сгенерированной компьютером программы непосредственно на цеховом производственном оборудовании.
Простейшая система off-line-программирования представляет собой автономный модуль, включающий средства графического моделирования, текстовый редактор и средства передачи управляющих программ роботу. Но наибольшая эффективность от применения таких систем достигается при их интеграции с САПР технологической подготовки производства. Поэтому большинство специализированных САПР РТК обеспечивает и off-line-программирование.
Постепенно системы прошли эволюцию от исследовательских пакетов, ориентированных на решение уникальных задач (например, моделирования копирующего манипулятора космического корабля Space Shuttle), до промышленных специализированных САПР, учитывающих особенности конкретных технологических процессов сварки, окраски, резания и т. д.
Типовой алгоритм работы технолога в рассматриваемой САПР ТП сварки включает следующие действия:
1. Выбрать из библиотеки требуемый конструкторско-технологический элемент (КТЭ) сварного шва.
2. Уточнить параметры КТЭ и автоматически получить план его обработки (фрагмент техпроцесса в виде последовательности операций и переходов с указанием средств технологического оснащения).
3. Поместить полученный фрагмент в техпроцесс.
4. Для основных переходов сварки получить в автоматизированном режиме информацию по сварочным материалам (включая нормы расхода), режимам сварки, нормы основного времени и др. Разместить полученные данные в техпроцессе.
5. По окончании проектирования запустить процесс автоматического формирования комплекта технологической документации.
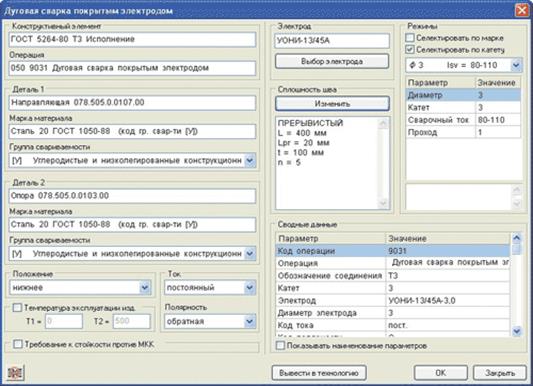
Рис. 7.1. Диалоговое меню Системы расчета режимов сварки
Отметим, что в помощь технологу-сварщику предусмотрены вспомогательные сервисы, которые позволяют вычислить количество участков при прерывистой сварке (прихватке), площадь прерывистой наплавки, оперативно определить геометрические параметры из чертежа и применить их в технологических расчетах (например, длину сварного шва), назначить допуски угловых и линейных размеров. Для этого предназначена Система администрирования сварочных КТЭ и режимы сварки:
- дуговая сварка покрытым электродом (рис. 7.1);
- дуговая сварка в углекислом газе сплошной проволокой;
- дуговая сварка в инертных газах неплавящимся электродом с присадочным металлом;
- дуговая сварка в инертных газах неплавящимся электродом без присадочного металла;
- дуговая сварка под флюсом;
- электрошлаковая сварка.
В составе комплекса программных продуктов АСКОН (САПР ТП ВЕРТИКАЛЬ, ЛОЦМАН:PLM, КОМПАС-3D и др.) обеспечивается полномасштабная автоматизация работ по виду производства «Сварка» в контексте технологической подготовки производства. Различными компонентами комплекса закрываются следующие задачи:
- автоматизация проектирования техпроцессов сварки;
- автоматическое формирование комплектов технологической документации по виду производства «Сварка» (согласно ГОСТ, СТП);
- формирование сводных ведомостей расхода сварочных материалов и других технологических норм (на узел, изделие, заказ и пр.);
- ведение базы данных по режимам сварки;
- ведение справочника технологических операций сварки;
- ведение справочника сварочного оборудования;
- ведение справочника материалов и сортаментов, применяемых на производстве (включая ведение физических характеристик материалов);
- укрупненный расчет норм трудовых затрат на сварочные операции.
Таким образом, разработанные специалистами АСКОН методы и средства автоматизированного проектирования обеспечили возможность полномасштабной автоматизации работ в контексте технологической подготовки сварочного производства. Система расчета режимов сварки (в составе комплекса программных продуктов АСКОН) успешно внедрена и применяется инженерами-технологами на промышленных предприятиях Российской Федерации и стран СНГ.
На заводах России имеются инсталляции мощного пакета RobCad американской фирмы Technomatics Technologies, включающего в себя обширную, свыше 100 моделей, библиотеку роботов, развитые функции проектирования сварочного инструмента, сварочной оснастки, различных роботизированных комплексов. Большинство таких же функций поддерживает отечественная разработка — программный комплекс РОБОМАКС, различные версии которого имеются на автомобильных заводах и на сварочных кафедрах ряда вузов. Знакомство с комплексом РОБОМАКС полезно для понимания возможностей мощных современных САПР, работающих на основе графического моделирования динамики работы технологического оборудования. В связи с этим методику и технологию автоматизированного проектирования сварочных РТК рассмотрим на примере этого программного продукта, реализованного на платформах массовых моделей компьютеров в операционных средах Dos и Windows. Комплекс программных средств РОБОМАКС является инструментом для решения задач технологической подготовки сборочно-сварочного производства. Объектами РОБОМАКС являются РТК дуговой и точечной контактной сварки, а также линии точечной контактной сварки.
В РОБОМАКС используются понятия «проектирование изображения» и «подготовка образа». Под «проектированием» понимается создание объемного изображения объекта и готовых изображений комплектующих деталей с дорисовкой недостающих элементов. «Подготовка» — это нанесение на уже созданное изображение дополнительной информации (например, сварных швов) и обработка графической информации, создание математического образа изделия, с которым ведется вся последующая работа систем. Подготовка образов всех элементов комплекса обязательна перед началом работы расчетных программ.
Комплекс программных средств построен из нескольких систем, объединенных идеей сквозного проектирования: на входе — исходные данные и образы деталей, а на выходе — готовая документация проекта и управляющие программы работы оборудования.

7.1 – Упрощенная схема взаимодействия систем применительно к контактной точечной и дуговой сварке программного комплекса РОБОМАКС
Основной модуль — проектирование РТК — работает с базами данных и библиотеками:
• сварочных роботов;
• управляемых манипуляторов изделия;
• сварочных клещей, горелок, резаков и другого инструмента;
• вспомогательных элементов окружения (например, ограждений, элементов оборудования, шкафов управления);
• специально подготовленных образов свариваемых конструкций, закрепленных в сборочно-сварочных приспособлениях.
Подсистема, предназначенная для конструирования сварочной оснастки и формирования моделей, входящая в программный комплекс. Подсистема «сварочный инструмент» предназначена для подготовки графических образов и формирования моделей сварочного инструмента, обеспечивающих доступность к зоне сварки и исключающих столкновения при заходе инструмента на свариваемый узел.
Подсистема «сварная конструкция» имеет целью создание образа сварного узла из образов поверхностей и деталей, импортированных из «внешнего» пакета (например, пакета CATIA). Детали собираются в узлы, наносятся сварные точки и швы и готовится математический образ. Однако возможна «сквозная» работа в среде AutoCAD с использованием пакета AutoSURF фирмы AutoDesk без импорта данных об образе сварного узла.
С использованием большого объема данных вспомогательных подсистем подсистема РТК предназначена для формирования компоновок сварочных постов. Она обеспечивает выбор модели робота, установку сварного узла вместе со сборочным приспособлением на манипулятор, определение взаимного положения манипулятора изделия относительно системы координат РТК. Выполняется трехмерное моделирование как объектов РТК, так и движений робота и манипулятора изделия со свариваемым узлом с учетом реально действующих ограничений, накладываемых сварочной технологией, оснасткой, приводами подвижности робота и манипулятора. Подсистема обеспечивает интерактивную работу с роботом при его обучении в составе РТК. Управление роботом и манипулятором изделия в интерактивном режиме с графическим отображением их движений является необходимым условием эффективной работы пользователя с системой как при компоновке РТК, так и при его программировании. Моделирование обучения робота позволяет запомнить все положения относительно сварного узла и включить их в технологическую программу. Отладка технологических программ производится здесь же с использованием идеальной модели РТК. Это облегчает и делает более эффективной работу технологов-программистов. Последующую калибровку таких программ применительно к конкретному реальному технологическому комплексу осуществляют на основе небольшого числа измерений, проводимых с помощью самого робота на одном из сварных узлов.
Базы данных роботов и манипуляторов связаны со своими подсистемами создания образов и моделей оборудования с возможностью моделирования и программирования его работы. При этом разработка моделей манипуляторов изделий и запись их в базу данных доступна пользователям системы, поскольку в любом сварочном производстве, приходится разрабатывать или покупать большое их количество самых разнообразных типов. Создание образов роботов со всеми их реальными ограничениями и характеристиками, а также с возможностью программирования ввиду сложности этой работы остается за разработчиками системы.
Все подсистемы предназначены и для подготовки конструкторской документации путем преобразования отработанных объемных моделей в плоские проекции и доводки их до вида чертежей.
Структура комплекса РОБОМАКС состоит из комплекта каталогов, подкаталогов и файлов, управление которыми осуществляется с помощью меню и реализуется программами монитора. РОБОМАКС — корневой каталог комплекса. Подкаталоги:
главный системный................................ ….. SYSTEM
роботов .................................................. ….. ROBOT
собранных инструментов ..................... ……TOOL
манипуляторов изделия......................... …… POSITION
изделий................................................... …….WPIECE
сечений................................................... …… SECTION
фурнитуры (неподвижных элементов) . …… FURNITURE
прототипов приспособлений................. …… FIXPROTO
пиктограмм ........................................... ……. ICO
электродов сварочных клещей ............. …… ELECTROD
электрододержателей сварочных клещей HOLDER
удлинителей и вылетов сварочных клещей STRETCH
переходников сварочных клещей......... ………TRANSIT
приводов сварочных клещей ............... ……... BODY
цилиндров сварочных клещей ............. ……... CYLINDER
сварных швов......................................... ……… SEAMS
проектов оснастки.................................. ……….FIXPROC
процессов (сведений о конкретной работе)……PROCESS
системы столкновений .......................... ……… IMAGE
В главном системном подкаталоге SYSTEM содержатся исполняемые программные модули, реализующие основные функции комплекса Робомакс. В подкаталогах SEAMS, WPIECE и TOOL содержатся файлы исходных данных сварных швов, математического образа изделия и инструмента для решения задачи столкновений, графические образы и слайды. В каталоге IMAGE содержатся файлы подсистемы подготовки математических образов для задачи анализа столкновений. В подкаталоге POSITIONER содержатся данные для создания моделей манипуляторов.
РОБОМАКС как система проектирования оборудования и оснастки сварочного производства и моделирования ее работы в составе рабочей ячейки обязана содержать прежде всего графические образы элементов и компонентов в сборе как основу моделирования. Информация о них представлена в различных форматах, и прежде всего 3D-изображениями (DWG-файлы).
Текстовая информация составляет базу данных. Она может использоваться в нескольких режимах: как справочная, как поисковая для выбора элемента и для практических расчетов различного характера. Очевидно, что такая информация в полном объеме разнородна, велика и зачастую избыточна, способы ее представления разнообразны и она должна пополняться постепенно: по мере разработки ее отдельных модулей — разработчиками, во время практической работы — пользователями.
Виды сведений, содержащихся в базах данных:
• условные обозначения, включая габаритные контуры оборудования и оснащения (стрелки направления движения и усилия, упоры, вентили и точки подводки энергоносителей, проезд, тара, опоры и т. п.). Здесь содержатся сведения, используемые в различных схемах: планировках, схемах
базирования, картах контроля, разводках и т. п.;
• 3D-изображения элементов или единиц оборудования. Как правило, они выполняют при моделировании ту же функцию, что и контуры оборудования на неподвижных планировках, определяя габаритные размеры и расположение элемента, но в пространстве. Поэтому 3D-образы обычно имеют точные размеры, но упрощенную форму без подробностей. Здесь очень важно специально отметить, что система, как правило, создает весьма точные формы и размеры образов и работает с ними. Однако с целью экономии вычислительных ресурсов при моделировании движения трехмерных объектов на экране специально упрощаются, тем самым обеспечивается возможность работы системы на менее мощных компьютерах и видеокартах;
• данные текстового или табличного типа (технические характеристики элементов, режимы, нормы, экономические сведения и т. п.), используемые для выбора или расчета.
Функции базы данных:
• хранить сведения о стандартных машинах и элементах (покупных и местных стандартизованных), реально существующих независимо от данной системы;
• хранить справочную информацию пользователя для проведения проектирования, расчетов, а также заказа на поставку деталей и комплектного оборудования;
• накапливать результаты, полученные на разных этапах в системе;
• содержать сведения графического,текстового и численного характера;
• служить программным средством при проектировании для автоматизации поиска необходимых элементов сварочной оснастки по одному или нескольким признакам;
• служить программным средством для автоматизации формирования массива исходных данных.
Каждому графическому образу элемента должны соответствовать его технические характеристики, чертежи и контуры элементов. Технические характеристики заполняются после создания 3D-образа элемента как поля данных определенных разделов и параметров. Режимы и нормативы имеют форму таблиц и необходимы при различных расчетах (силовых характеристик, электрических параметров режимов, мощностей и сечений, нормировочных расходов и экономических сравнений).
Особенность «первичных» элементов подсистем инструмента и оснастки (электроды, вылеты, блочки, платики, зажимы) заключается в том, что они представлены лишь графическими изображениями. Готовые компоненты (сварочные клещи, роботы, манипуляторы) уже подготовлены как математические образы для работы программы анализа столкновений.
Дата: 2019-11-01, просмотров: 429.