Данный способ может быть использован на кораблях, штурманское вооружение которых включает инерциальную навигационную систему (ИНС). Способ применим как при нахождении корабля в базе, так и в море на ходу. Учитывая, что выходной курс ИНС (инерциальный курс) в 3-4 раза точнее выходного курса гирокомпасного, инерциальный курс можно отождествлять с истинным курсом корабля. Применение данного способа будет корректным, если сравнение гирокомпасного курса с выходным курсом ИНС будет осуществляться в течение 24 ч, что обусловлено периодом колебательной погрешности инерциального курса. Другими словами, достоверное определение постоянной поправки курса гирокомпаса требует сравнения курсов в течение 24 ч. Но этот способ является единственным, позволяющим определить постоянную поправку гирокомпасного курса без использования внешних ориентиров, например в подводном положении подводной лодки.
1 По команде «Товсь… Ноль!» одновременно снять показания выходного курса ИНС  и гирокомпасного курса
и гирокомпасного курса  и зафиксировать момент времени замера.
и зафиксировать момент времени замера.
2 Рассчитать разность курсов  для данного замера.
для данного замера.
Примечание: В некоторых навигационных комплексах предусмотрено автоматическое вычисление разности  , полученное значение выводится на шкалу, высвечивается при запросе на цифровом табло или на самописце для автоматического ведения графика
, полученное значение выводится на шкалу, высвечивается при запросе на цифровом табло или на самописце для автоматического ведения графика  .
.
3 Снятие отсчетов и расчет разности курсов  производить с интервалом в 1-2 ч в течение 24 часов (принимая во внимание суточный период колебательной погрешности инерциального курса). Полученные разности
производить с интервалом в 1-2 ч в течение 24 часов (принимая во внимание суточный период колебательной погрешности инерциального курса). Полученные разности  нанести на график (рис.7) и соответствующие точки соединить отрезками прямой линии.
нанести на график (рис.7) и соответствующие точки соединить отрезками прямой линии.
4 Определить постоянную поправку гирокомпаса  графическим осреднением графика
графическим осреднением графика  линией, параллельной оси времени, или вычислить постоянную поправку гирокомпаса по формуле
линией, параллельной оси времени, или вычислить постоянную поправку гирокомпаса по формуле
 ,
,
где  – значение мгновенной разности двух курсов в момент отсчета; N – число моментов снятия разности курсов за 24 ч.
– значение мгновенной разности двух курсов в момент отсчета; N – число моментов снятия разности курсов за 24 ч.
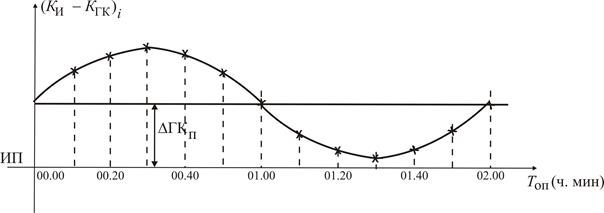
Рис. 7. График определения постоянной поправки гирокомпаса способом сравнения гирокомпасного курса с курсом инерциальной навигационной системы
Примечание. Расчет разностей и построение графиков разностей курсов должно быть выполнено для разности  , а не наоборот. В противном случае при использовании данного способа получается не поправка, а погрешность гирокомпасного курса.
, а не наоборот. В противном случае при использовании данного способа получается не поправка, а погрешность гирокомпасного курса.
5 Оценить точность работы ГКУ-1 в режиме ГК, для чего рассчитать СКП выработки курса:
 ,
,
где  – значение мгновенной разности двух курсов в момент отсчета; N – число моментов снятия разности курсов за 24 часа;
– значение мгновенной разности двух курсов в момент отсчета; N – число моментов снятия разности курсов за 24 часа;  – постоянная поправка гирокомпасного курса.
– постоянная поправка гирокомпасного курса.
Рассчитать предельную погрешность выработки курса:
 ,
,
где  – коэффициент по заданной вероятности, выбирается из Руководства по точности кораблевождения в зависимости от заданной вероятности предельной погрешности согласно табл. 3:
– коэффициент по заданной вероятности, выбирается из Руководства по точности кораблевождения в зависимости от заданной вероятности предельной погрешности согласно табл. 3:
Таблица 9
| Р | 0,950 | 0,990 | 0,993 | 0,997 |
|
| 1,96 | 2,58 | 2,70 | 2,97 |
Для гирокомпаса «Курс-10» погрешность выработки курса в ТТХ указана с вероятностью Р = 0,950, то есть = 1,96.
6. Сравнить полученную величину  с точностью работы гирокомпаса «Курс-10» в данных условиях, приведенную в ТТХ.
с точностью работы гирокомпаса «Курс-10» в данных условиях, приведенную в ТТХ.
Если рассчитанная предельная погрешность  меньше указанной в ТТХ точности выработки курса, то гирокомпас может быть использован по назначению.
меньше указанной в ТТХ точности выработки курса, то гирокомпас может быть использован по назначению.
Если рассчитанная величина больше указанной в ТТХ точности выработки курса, то необходимо проверить расчеты и разобраться в причинах большой погрешности гирокомпаса.
Если величина рассчитанной постоянной поправки не превышает ±0,5°, то компенсация постоянной поправки производится механически по шкале «ПОСТОЯННАЯ ПОПРАВКА  », которая находится в приборе 26М.
», которая находится в приборе 26М.
Если же рассчитанная постоянная поправка превышает ±0,5°, то необходимо проверить выставку в ДП корабля основного прибора и пеленгаторного репитера.
Разворот корпуса основного прибора осуществляется в следующей последовательности:
- ослабить винты крепления основного прибора 1ПМ-М и развернуть корпус прибора вокруг вертикальной оси на нужную величину;
- по окончании работ закрепить прибор.
Аналогично разворачивается пелорус пеленгаторного репитера – прибор 20КМ.
Дата: 2019-07-31, просмотров: 397.