Вступ
Електричні підйомні крани – це пристрої, що служать для вертикального та горизонтального переміщення вантажів. Пересувна металічна конструкція с розташованій на ній лебідкою є основним елементом підйомного крану. Механізми пересування ферми крану і підйомна лебідка приводяться до дії електричними двигунами.
Умови роботи, призначення визначають конструктивну форму крану. Кожну групу кранів в залежності від характеру транспортуємого вантажу підрозділяють по виду вантажозахватуючого пристрою. Не зважаючи на конструктивні особливості підйомних кранів, усі вони мають типове електрообладнання, вибір якого визначається умовами праці та характером навантаження.
Керування двигунами здійснюється контролерами із кабіни оператора.
Все більше значення в системах комплексної механізації та автоматизації опановує електропривод. Електродвигуни виготовляються у дуже широкому діапазоні потужностей. Вони відносно легко компонуються як єдине ціле з технологічними обладнанням, компактні, економічні, мають високі регулювальні властивості.
У наш час автоматизований привід є основою механізації та комплексної автоматизації промислових процесів. Розвиток електроприводу йде по шляху підвищення економічності та надійності за умови подальшого удосконалення двигунів, апаратів, перетворювачів, аналогових та цифрових засобів керування.
Розвиток автоматичного керування електроприводами веде до удосконалення конструкції машин, докорінним змінам технологічного процесу, до подальшого технологічного процесу в промисловості.
Тому в даному проекті виконується розрахунок асинхронного двигуна с фазним ротором та розрахунок електроприводу постійного струму за системою перетворювач-двигун.
Вихідні дані до завдання
Таблиця 1.1 – Технічні і технологічні параметри підйомної лебідки
|
| Найменування | Позначення | Розмір ність | Варіант |
| 57 | ||||
| 1 | Вантажопідйомність лебідки | 
| кН | 220 |
| 2 | Вага крюка | 
| кН | 10,2 |
| 3 | Діаметр барабана | 
| м | 0,5 |
| 4 | Момент інерції барабана | 
| кг∙м2 | 40 |
| 5 | Кратність полиспаста | 
| 4 | |
| 6 | Швидкість підіймання вантажу | 
| м/c | 0,3 |
| 7 | Швидкість опускання вантажу | 
| м/c | 0,32 |
| 8 | Середнє прискорення (сповільнення) при підійманні вантажу | 
| м/c2 | 0,28 |
| 9 | Середнє прискорення (сповільнення) при опусканні вантажу | 
| м/c2 | 0,22 |
| 10 | Швидкість підіймання пустого крюка | 
| м/c | 0,31 |
| 11 | Швидкість опускання пустого крюка | 
| м/c | 0,31 |
| 12 | Середнє прискорення (сповільнення) при підійманні пустого крюка | 
| м/c2 | 0,5 |
| 13 | Середнє прискорення (сповільнення) при опусканні пустого крюка | 
| м/c2 | 0,5 |
| 14 | Посадкова швидкість | 
| м/c | 0,04 |
| 15 | Висота підіймання | 
| м | 35 |
| 16 | Висота опускання | 
| м | 33 |
| 17 | Довжина провису | 
| м | 1 |
| 18 | Швидкість при виборі (напуску) провису | 
| м/с | 0,27 |
| 19 | Середнє прискорення (сповільнення) при виборі або напуску провису | 
| м/с² | 0,5 |
| 20 | Тривалість горизонтального переміщення вантажу | 
| c | 82 |
| 21 | Тривалість горизонтального переміщення крюка | 
| с | 69 |
| 22 | Тривалість завантаження | 
| с | 62 |
| 23 | Тривалість розвантаження | 
| с | 50 |


Вибір двигуна
Паспортні дані обраного двигуна
Асинхроний двигун МТ 73–10
Pн=125 кВт; f=50 Гц; TBн=25%; Uн=380 В; nн=586 об/хв; Mmax/Mн=3,4; cosφн=0,73; Icн=286 А; Icx=170 А; Rc=0,0154 Ом; Xc=0,0731 Ом; Epн=442В; Ipн=175 А; Rp=0,0337 Ом; Xp=0,098 Ом; J=14,2  ; Ke=0,808.
; Ke=0,808.
Уточнимо передавальне число, число ступенів, номінальний ККД редуктора і, якщо розбіжність між уточненими і попередніми значеннями величин  перевищує 7%, необхідно також уточнити потужності
перевищує 7%, необхідно також уточнити потужності  і
і  .
.

Передавальне число і число ступенів збігаються з вказаною точністю, це свідчить, що й номінальний ККД редуктора, а також потужності  і збігаються з раніше розрахованими.
і збігаються з раніше розрахованими.
Вибір та напуск провису
В обох випадках двигун, переборюючи втрати в редукторі, навантажується реактивним моментом опору:

де  – усталена кутова швидкість двигуна при виборі чи напуску провису.
– усталена кутова швидкість двигуна при виборі чи напуску провису.
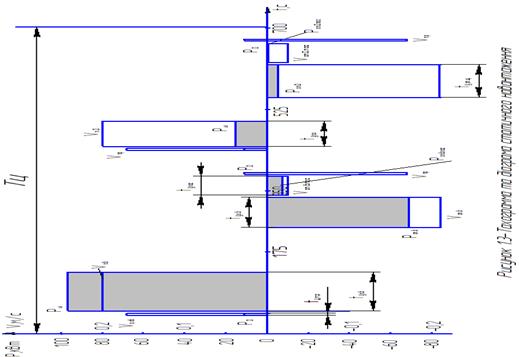
На рисунку 1.4 наведені механічні характеристики механізму та двигуна при виборі (напуску) провису.
Середній динамічний момент двигуна:
 ,
,
де  – приведений до вала двигуна момент інерції обертових частин привода,
– приведений до вала двигуна момент інерції обертових частин привода,


Оскільки середній динамічний момент відповідає середній швидкості  , то величина пускового моменту
, то величина пускового моменту  двигуна:
двигуна:

Точки з координатами  ,
,  і
і  ,
,  визначають шукану реостатну механічну характеристику 1 (для характеристики 3 ті ж самі координати беруться з протилежним знаком).
визначають шукану реостатну механічну характеристику 1 (для характеристики 3 ті ж самі координати беруться з протилежним знаком).
Оскільки величина  за модулем менша абсолютного значення моменту
за модулем менша абсолютного значення моменту  , то середній момент двигуна при гальмуванні:
, то середній момент двигуна при гальмуванні:


Початковий гальмовий момент:

Точки з координатами  ,
,  і
і  ,
,  визначають шукану реостатну характеристику 2 (для характеристики 4 ті ж координати беруться з протилежним знаком).
визначають шукану реостатну характеристику 2 (для характеристики 4 ті ж координати беруться з протилежним знаком).
Підйом вантажу
Величина середнього пускового моменту двигуна для забезпечення заданого прискорення  при підійманні вантажу:
при підійманні вантажу:

де  – момент опору на валу двигуна при підійманні вантажу:
– момент опору на валу двигуна при підійманні вантажу:

 – середній динамічний момент двигуна при розгоні:
– середній динамічний момент двигуна при розгоні:

 – швидкість двигуна при підійманні вантажу (на природній механічній характеристиці 11),
– швидкість двигуна при підійманні вантажу (на природній механічній характеристиці 11),  ;
;
 – приведений до вала двигуна момент інерції з урахуванням мас поступально рухомих елементів,
– приведений до вала двигуна момент інерції з урахуванням мас поступально рухомих елементів,

Приймаю початковий пусковий момент і момент переключення:



Тривалість розгону при підійманні вантажу

Середній момент двигуна при гальмуванні:

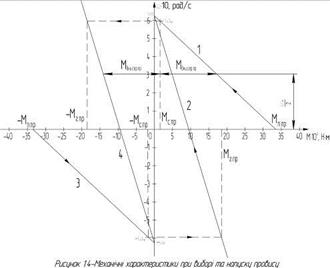
При  >0 повинний зберігатися руховий режим, що реалізується на ділянці а– b графіка 13 (рисунок 1.5).
>0 повинний зберігатися руховий режим, що реалізується на ділянці а– b графіка 13 (рисунок 1.5).

Спуск вантажу
Статичний момент на валу двигуна:

Динамічний момент при опусканні вантажу:

Середній пусковий момент при опусканні вантажу:

Середній гальмовий момент при опусканні вантажу:

До посадкової швидкості працює в режимі противмикання (х-ка 15), для остаточної зупинки використовують динамічне гальмування (х-ка 16).
Висновки
У ході курсової роботи була спроектована система електроприводу для підйомної лебідки мостового крану (частина І) та був проведений розрахунок та побудова перехідних процесів двигуна у системі генератор-двигун (частина ІІ)
Під час проектування електропривода підйомної лебідки були розглянуті питання:
а) Побудова діаграми статичного навантаження та попередній вибір двигуна з довідника для даної системи електропривода;
б) Визначення режимів роботи двигуна для заданих технологічних умов;
в) Розрахунок і побудова статичних характеристик двигуна для різних режимів роботи двигуна;
г) Розрахунок опорів допоміжних резисторів;
д) Розрахунок та побудова перехідних процесів при роботі двигуна;
е) Побудова діаграми навантажень двигуна з врахуванням перехідних процесів;
є) Перевірка двигуна по нагріву та перевантажної здібності;
ж) Тепловий розрахунок та вибір резисторів, складання схеми з’єднання стандартних ящиків опорів.
з) Визначення витрат електроенергії за цикл роботи двигуна
Під час виконання другої частини проекту були розраховані та побудовані перехідні процеси двигуна при його пусканні, а також була проведена оцінка можливості його пуску у одну ступінь.
Вступ
Електричні підйомні крани – це пристрої, що служать для вертикального та горизонтального переміщення вантажів. Пересувна металічна конструкція с розташованій на ній лебідкою є основним елементом підйомного крану. Механізми пересування ферми крану і підйомна лебідка приводяться до дії електричними двигунами.
Умови роботи, призначення визначають конструктивну форму крану. Кожну групу кранів в залежності від характеру транспортуємого вантажу підрозділяють по виду вантажозахватуючого пристрою. Не зважаючи на конструктивні особливості підйомних кранів, усі вони мають типове електрообладнання, вибір якого визначається умовами праці та характером навантаження.
Керування двигунами здійснюється контролерами із кабіни оператора.
Все більше значення в системах комплексної механізації та автоматизації опановує електропривод. Електродвигуни виготовляються у дуже широкому діапазоні потужностей. Вони відносно легко компонуються як єдине ціле з технологічними обладнанням, компактні, економічні, мають високі регулювальні властивості.
У наш час автоматизований привід є основою механізації та комплексної автоматизації промислових процесів. Розвиток електроприводу йде по шляху підвищення економічності та надійності за умови подальшого удосконалення двигунів, апаратів, перетворювачів, аналогових та цифрових засобів керування.
Розвиток автоматичного керування електроприводами веде до удосконалення конструкції машин, докорінним змінам технологічного процесу, до подальшого технологічного процесу в промисловості.
Тому в даному проекті виконується розрахунок асинхронного двигуна с фазним ротором та розрахунок електроприводу постійного струму за системою перетворювач-двигун.
Вихідні дані до завдання
Таблиця 1.1 – Технічні і технологічні параметри підйомної лебідки
|
| Найменування | Позначення | Розмір ність | Варіант |
| 57 | ||||
| 1 | Вантажопідйомність лебідки |
| кН | 220 |
| 2 | Вага крюка |
| кН | 10,2 |
| 3 | Діаметр барабана |
| м | 0,5 |
| 4 | Момент інерції барабана |
| кг∙м2 | 40 |
| 5 | Кратність полиспаста |
| 4 | |
| 6 | Швидкість підіймання вантажу |
| м/c | 0,3 |
| 7 | Швидкість опускання вантажу |
| м/c | 0,32 |
| 8 | Середнє прискорення (сповільнення) при підійманні вантажу |
| м/c2 | 0,28 |
| 9 | Середнє прискорення (сповільнення) при опусканні вантажу |
| м/c2 | 0,22 |
| 10 | Швидкість підіймання пустого крюка |
| м/c | 0,31 |
| 11 | Швидкість опускання пустого крюка |
| м/c | 0,31 |
| 12 | Середнє прискорення (сповільнення) при підійманні пустого крюка |
| м/c2 | 0,5 |
| 13 | Середнє прискорення (сповільнення) при опусканні пустого крюка |
| м/c2 | 0,5 |
| 14 | Посадкова швидкість |
| м/c | 0,04 |
| 15 | Висота підіймання |
| м | 35 |
| 16 | Висота опускання |
| м | 33 |
| 17 | Довжина провису |
| м | 1 |
| 18 | Швидкість при виборі (напуску) провису |
| м/с | 0,27 |
| 19 | Середнє прискорення (сповільнення) при виборі або напуску провису |
| м/с² | 0,5 |
| 20 | Тривалість горизонтального переміщення вантажу |
| c | 82 |
| 21 | Тривалість горизонтального переміщення крюка |
| с | 69 |
| 22 | Тривалість завантаження |
| с | 62 |
| 23 | Тривалість розвантаження |
| с | 50 |
Електропривод грузопід’ємної лебідки мостового крану
Дата: 2019-07-30, просмотров: 327.