Горизонтальная рама каркаса кабины вместе с полом образует несущую конструкцию грузовой платформы.
Полы могут иметь деревянную, металлическую или комбинированную конструкцию.
Кабины могут оборудоваться подвижными и неподвижными полами в зависимости от назначения лифта, наличия и особенностей конструкции системы контроля ее загрузки.
Неподвижные полы устанавливаются в кабинах грузовых, больничных лифтов и в пассажирских лифтах с устройством контроля времени загрузки кабины, или в тех случаях, когда применяемый метод контроля нагрузки не требует наличия подвижного пола. Неподвижный пол может быть составной частью конструкции купе кабины, закрепленного на несущем каркасе через амортизирующие прокладки или представлять собой коробчатую конструкцию грузовой платформы.
Металлическая конструкция неподвижного пола имеет защитное покрытие из дерева или синтетических материалов. Деревянные полы составляются из плотно пригнанных досок толщиной 50 – 80 мм, соединяемых в шпунт и связанных между собой поперечными брусьями. Деревянный настил устанавливается в металлическую раму с промежуточными поперечными балками. Для защиты деревянный настил покрывается тонким металлическим листом или пластиком.
Устройства контроля загрузки пассажирского лифта с подвижным полом обычно представляет собой грузовые или пружинные весы с одним или несколькими дискретными уровнями контроля нагрузки и соответствующими микропереключателями.
Подвижный пол кабины должен изготавливаться из сплошного щита и полностью перекрывать порог дверей, кабины. У кабин с автоматическими раздвижными дверями порог может быть неподвижным.
Вертикальный ход подвижного пола не должен превышать 20 мм [2].
На рис. 2.3 представлена схема устройства контроля загрузки кабины с грузовым механизмом.
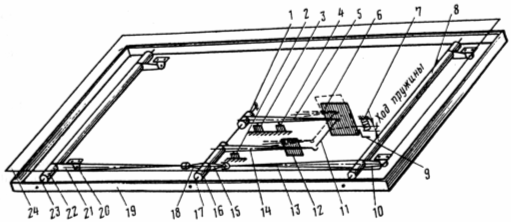
Рис. 2.3. Схема грузового механизма контроля загрузки с подвижным полом:
1, 16 – ступицы; 2, 3, 4 – микровыключатели; 5, 10, 13, 14, 15, 18, 21 – рычаги;
6, 12 – грузы; 7 – пружина; 8, 22 – полые валы; 9 – упор; 17, 23 – ось; 11 – палец;
19 – горизонтальная рама каркаса кабины; 20 – опорная стойка пола;
24 – щитовая конструкция пола
Грузонесущей основой подвижного пола является горизонтальная рама 19 каркаса кабины.
Щитовая конструкция пола через стойки 20 шарнирами опирается на рычаги полых валов 8 и 22, которые с помощью подшипников закреплены на неподвижных осях 17, 23, установленных на горизонтальной раме. Вилки рычагов 13 и 21 охватывают подшипники рычагов 15, 18 ступицы 16, которая установлена на оси 17. Такая конструкция обеспечивает вертикальное поступательное перемещение пола независимо от положения груза в кабине.
На рычагах 5 и 14 ступиц 1 и 16 закреплены грузы взвешивающего устройства 6 и 12 Между грузами 12 и 6 имеется односторонняя связь посредством пальца 11, взаимодействующего со скобой, закрепленной на конце рычага 14.
Для контроля 10 % перегрузки кабины, кроме груза 6, используется цилиндрическая пружина 7 Под рычагами 5 и 14 установлены микровыключатели 2, 3, 4.
При отсутствии пассажиров в кабине, груз 12, установленный на рычаге 14, уравновешивает силу тяжести подвижного пола 24. При этом рычаг 14 воздействует на микровыключатель 2
При появлении груза в кабине массой более 15 кг равновесие системы нарушается и рычаг 14 с грузом 12 поднимается вверх. Срабатывает контактное устройство 2, сигнализируя системе управления о наличии груза.
Дальнейшее увеличение загрузки кабины сопровождается дополнительным подъемом рычага 14. Связанная с ним скоба поднимает палец 11 вместе с грузом 6, поворачивая рычаг 5 против часовой стрелки.
Если груз в кабине достигает 90 % номинальной грузоподъемности, дальнейший подъем рычага 5 приводит к срабатыванию контактного устройства 4. При этом система управления лифта перестает реагировать на попутные вызовы с этажных площадок.
При превышении номинальной нагрузки более чем на 10 %, рычаг дополнительно поднимается вверх сжимая предварительно сжатую пружину 7 срабатывает контактное устройство 3 и отключается двигатель механизма подъема. Момент срабатывания контактного устройства устанавливается регулировкой силы предварительного сжатия пружины 7.
В лифтах с распашными дверями кабины применяется более простая система подвижного пола с петлевым креплением одной его стороны и опорой другой на пружину. При такой конструкции чувствительность контроля нагрузки зависит от положения пассажира по отношению к петлевой подвеске пола.
Рассматриваемая конструкция является вариантом системы контроля нагрузки с пружинным уравновешиванием. Роль грузовой платформы взвешивающего устройства выполняет купе кабины, которое имеет возможность вертикальных, поступательных перемещений относительно каркаса кабины (рис. 2.4. а).
Отличительной особенностью данной конструкции является очень небольшая величина вертикальных перемещений пола купе, который остается практически неподвижным.
При отсутствии пассажиров в кабине, сила тяжести купе уравновешивается усилием предварительно деформируемой двухопорной балки 1. Установка величины предварительной деформации осуществляется регулировочным болтом 4 относительно неподвижной втулки 5 (рис. 2.4 б).
Увеличение нагрузки купе приводит к дополнительной деформации балки и увеличению угла ее поворота  на опорах. Благодаря этому, консольная часть балки, с винтом 6 на конце, поворачивается против часовой стрелки. Винт 6 действует на рычаг 7, который поднимается вверх, преодолевая усилие пружины 8, и перестает действовать на приводной механизм контактов микровыключателя 10 по достижению определенного, контролируемого уровня нагрузки купе кабины.
на опорах. Благодаря этому, консольная часть балки, с винтом 6 на конце, поворачивается против часовой стрелки. Винт 6 действует на рычаг 7, который поднимается вверх, преодолевая усилие пружины 8, и перестает действовать на приводной механизм контактов микровыключателя 10 по достижению определенного, контролируемого уровня нагрузки купе кабины.
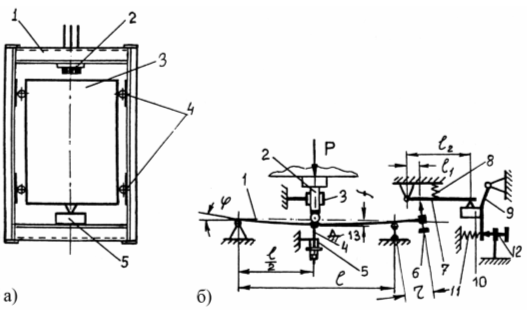
Рис. 2.4. Система контроля загрузки кабины с плавающей установкой купе
а) схема установки взвешивающего устройства: 1 – каркас, 2 – подвеска, 3 – купе,
4 – направляющие ролики вертикального перемещения купе,
5 – взвешивающее устройство;
б) схема устройства контроля нагрузки: 1 – упругая предварительно деформированная балка, 2 – устройство передачи нагрузки от пола купе на балку, 3 – направляющая втулка, 4 – болт регулировки предварительной деформации балки, 5 – упорная втулка,
6, 12 – винт регулировочный, 7 – балка рычажного передаточного механизма,
8, 11 – пружина, 9 – рычаг подвески микровыключателя,
10 – микровыключатель, 13 – упор
Взвешивающее устройство оборудовано тремя комплектами элементов 6 – 12 и их настройка позволяет контролировать три уровня загрузки кабины, включая перегрузку.
Винты 6 и 12 используются для регулировки нагрузки срабатывания каждого из 3-х микровыключателей 10. Под балкой установлен упор 13 для защиты ее от перегрузки, при посадке кабины на буфер или ловители.
Определяем параметры взвешивающего устройства.
Прогиб балки в середине пролета:
 , (2.6)
, (2.6)
где l – пролет балки, м;
I – момент инерции поперечного сечения балки, м4;
P – расчетная нагрузка, Н;
Е – модуль упругости материала балки, Н/м2.
 0,0009 м
0,0009 м
Угол упругого поворота оси балки на опоре при прогибе в середине пролета
 (2.7)
(2.7)
 0,0022 рад
0,0022 рад
Тангенциальное перемещение болта 6 составит величину
 , м, (2.8)
, м, (2.8)
где r – радиус поворота рычага.
 =0,00027 м
=0,00027 м
Перемещение конца рычага 7 в точке контакта с конечным выключателем
 , м (2.9)
, м (2.9)
 = 0,0007 м.
= 0,0007 м.
Соотношение плеч рычажной системы соответствует величине перемещения приводного элемента микропереключателя.
Дата: 2019-07-30, просмотров: 349.