Тяговое усилие канатоведущего шкива определяется силой трения канатов о шкив. Если кабину лифта начать постепенно перегружать, то при определенном значении массы груза сила трения окажется недостаточной, и канаты начнут скользить по шкиву. Причем начало скольжения канатов происходит при совершенно определенном соотношении между усилиями в левой и правой ветвях каната.
Во избежание полного проскальзывания каната относительно шкива необходимо выполнить условие формулы Эйлера
 , (3.18)
, (3.18)
где  – коэффициент трения между канатом и ручьем шкива,
– коэффициент трения между канатом и ручьем шкива,  [11];
[11];
 – угол обхвата шкива, рад,
– угол обхвата шкива, рад, 
Величина  называется тяговым коэффициентом или тяговым фактором, и чем она больше, тем большее тяговое усилие может создавать канатоведущий шкив.
называется тяговым коэффициентом или тяговым фактором, и чем она больше, тем большее тяговое усилие может создавать канатоведущий шкив.
Как следует из формулы (3.18), величина тягового фактора шкива зависит от величины коэффициента трения каната о шкив и угла обхвата шкива канатом .
При проектировании лифтов с канатоведущими шкивами необходимо проводить проверку тяговой способности шкива. Для расчета выбирается такой режим работы, когда усилие в более загруженной ветви достигает максимума, а в менее загруженной ветви - минимума. Обычно это соответствует периоду пуска полностью груженной кабины с первого этажа (рис. 3.8).
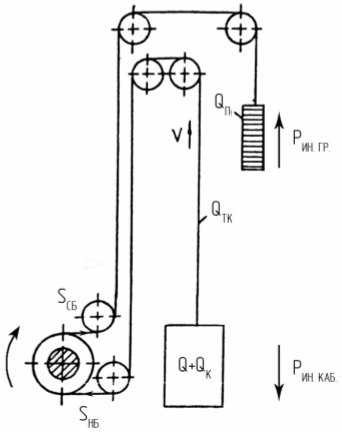
Рис 3.8. Кинематическая схема лифта
В этом случае усилие в точке набегания канатов на шкив
 ,
,
где Q, Qк, Qтк - масса груза, кабины и тяговых канатов, кг;
 – ускорение пуска. В соответствии с ПУБЭЛ [4] максимальное ускорение пуска для лифтов, в которых допускается транспортировка людей,
– ускорение пуска. В соответствии с ПУБЭЛ [4] максимальное ускорение пуска для лифтов, в которых допускается транспортировка людей, 
g – ускорение свободного падения, 
 – коэффициент трения башмаков (для металлических башмаков принимается равным 0,12);
– коэффициент трения башмаков (для металлических башмаков принимается равным 0,12);
 ,
,  – ширина и глубина кабины соответственно, м;
– ширина и глубина кабины соответственно, м;
 – расстояние между башмаками по вертикали, м.
– расстояние между башмаками по вертикали, м.

Усилие в точке сбегания (см. рис. 3.8)
 ,
,
где  – сила инерции противовеса в период пуска, направленная в сторону, противоположную направлению движения противовеса, кг.
– сила инерции противовеса в период пуска, направленная в сторону, противоположную направлению движения противовеса, кг.
В соответствие с выводами, полученными в [11]
Подставив полученное значение в формулу Эйлера получим
1,5<3
Условие 3.18 выполняется.
Вывод: тяговая способность канатоведущего шкива достаточна для работы лифта.
Расчет электродвигателя
Потребная мощность двигателя лебедки для обычных лифтов выбирается по условию движения полностью груженой кабины с первого этажа без учета инерционных нагрузок:
 (3.19)
(3.19)
где  – КПД передачи (для червячной передачи η = 0,6…0,8; КПД возрастает с увеличением числа заходов червяка);
– КПД передачи (для червячной передачи η = 0,6…0,8; КПД возрастает с увеличением числа заходов червяка);
 – КПД шкива или барабана (ηшк = 0,94…0,98; меньшие значения относятся к шкивам на подшипниках скольжения, большие – к шкивам на подшипниках качения).
– КПД шкива или барабана (ηшк = 0,94…0,98; меньшие значения относятся к шкивам на подшипниках скольжения, большие – к шкивам на подшипниках качения).
В лифтах с противовесом окружное усилие

Сопротивление на отклоняющих блоках можно с достаточной точностью определить по формуле
 , (3.20)
, (3.20)
где Sбл - усилие в канате при набегании на отклоняющий блок, Н;
 - угол обхвата блока канатами;
- угол обхвата блока канатами;
 - коэффициент сопротивления (для блоков на подшипниках качения ω = 0,02; на подшипниках скольжения ω = 0,04).
- коэффициент сопротивления (для блоков на подшипниках качения ω = 0,02; на подшипниках скольжения ω = 0,04).
Сопротивление на верхнем блоке

Сопротивление на нижнем блоке


Выбираем двигатель АС-2-72-6/18ШЛ со следующими параметрами:
N=3,35/1,18 кВт;
n=950/275 мин-1
Расчет редуктора
В редукторах лифтовых лебедках преимущественное распространение получили червячные передачи (рис. 3.9) в силу ряда очевидных преимуществ: возможность получения больших передаточных чисел в одной паре, а также плавность и бесшумность работы [3].
Недостатком червячной передачи является сравнительно низкий КПД, повышенный износ в связи с большими скоростями скольжения в зацеплении, склонность к задирам и заеданию контактирующих поверхностей.
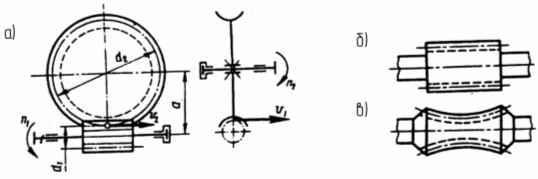
Рис. 3.9. Схема червячной передачи лифтового редуктора:
а) червячная передача; б) червяк цилиндрический; в) червяк глобоидный
В нашей стране отдается предпочтение глобоидным передачам. Глобоидные червячные передачи обладают повышенной нагрузочной способностью, так как в зацеплении с зубом червяка одновременно находится несколько зубьев, и линии контакта зубьев с червяком располагаются практически перпендикулярно вектору скорости скольжения, что способствует образованию непрерывной масляной пленки на трущихся поверхностях. Благоприятные условия смазки способствуют устранению заедания в червячном зацеплении.
Увеличение площади контактной поверхности позволяет использовать более дешевые сорта бронзы и дает некоторую экономию цветных металлов. Именно это обстоятельство предопределило предпочтительное применение глобоидных передач в лифтовых лебедках отечественного производства в послевоенный период. Наряду с очевидными достоинствами, глобоидные передачи имеют весьма существенные недостатки.
Значительно сложнее технология изготовления глобоидных передач. Практическое отсутствие оборудования для шлифовки глобоидного червяка исключило возможность его термической обработки, что в свою очередь, привело к снижению усталостной прочности, уменьшению КПД и повышенному износу зубьев колеса в связи с наличием существенных микронеровностей на поверхности червяка. Отсутствие аналитической теории и использование экспериментальных зависимостей существенно усложняет процесс проектирования.
Глобоидные передачи весьма критичны к точности сборки и регулировке осевого положения червяка и колеса. Снижение точности сборки и регулировки глобоидной передачи влечет за собой резкое снижение КПД и может вызвать заклинивание червячного зацепления.
К недостатку глобоидной передачи следует отнести и наличие небольших кинематических колебаний окружной скорости червячного колеса, которые могут служить одной из причин вибрации кабины.
В лифтовых лебедках применяют три способа расположения червяка редуктора: нижнее горизонтальное, верхнее горизонтальное и вертикальное.
Лебедки с верхним расположением цилиндрического червяка успешно применяются в лифтах зарубежного и отечественного производства.
Недостатком такого редуктора является ухудшение условий смазки зацепления после длительного простоя лифта. Остаточная масляная пленка не гарантирует жидкостное трение в момент пуска двигателя. Для компенсации этого недостатка и повышения несущей способности масляной пленки целесообразно увеличивать скорость скольжения контактирующих поверхностей червячного зацепления за счет применения двигателя с повышенной частотой вращения ротора.
С другой стороны в лебедках с верхним расположением червяка полностью устраняется утечка масла.
При выборе редуктора с глобоидным червяком должно обеспечиваться следующее условие:
Uр ≥ Uо;
где Uр,Uо – табличное и расчетное значение передаточного числа редуктора;
Передаточное число редуктора определяется с учетом кинематической схемы лифта по следующей формуле
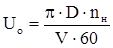 , (3.21)
, (3.21)
где D – расчетная величина диаметра КВШ, м;
nн – номинальное значение частоты вращения вала двигателя, об/мин;
V – расчетное значение величины скорости кабины, м/с.
Выбираем редуктор РГЛ-180 с передаточным числом U=35.
После выбора редуктора лебедки производится уточнение диаметра барабана (КВШ) по кинематическому условию, гарантирующему обеспечение номинальной скорости движения кабины с погрешностью не превышающей 15%.
 , м, (3.22)
, м, (3.22)
где Vр – рабочая скорость кабины, равная номинальной или отличающейся на 15 %, м/с;
Uр – табличное значение передаточного числа редуктора лебедки;
 – номинальное значение частоты вращения вала двигателя, об/мин.
– номинальное значение частоты вращения вала двигателя, об/мин.
Оставляем диаметр шкива D=0,72 м, т.к. полученное значение с учетом погрешности в пределах нормы.
Расчет тормоза лебедки
Тормоз предназначен для замедления движения машины или механизма, полной остановки и надежной фиксации неподвижного состояния.
Тормоза лифтовых лебедок должны удовлетворять следующим требованиям:
– высокая надежность и безопасность работы;
– наличие механизма ручного выключения тормоза с самовозвратом в исходное состояние;
– высокое быстродействие;
–низкая виброактивность и уровень шума;
– технологичность изготовления и малая трудоемкость технического обслуживания;
– обеспечение необходимой точности остановки кабины в лифтах с нерегулируемым приводом.
В лифтовых лебедках используются колодочные тормоза нормально-замкнутого типа с электромагнитной растормаживающей системой. Тормоз замкнутого типа характеризуется тем, что затормаживает систему при выключенном приводе и растормаживает ее при включении привода.
Правила ПУБЭЛ исключают возможность применения ленточных тормозов в связи с их недостаточной надежностью.
Роль тормоза лифтовой лебедки зависит от типа привода. В лебедках с нерегулируемым приводом тормоз используется для обеспечения необходимой точности остановки и надежного удержания кабины на уровне этажной площадки, тогда как в лебедках с регулируемым приводом - только для фиксации неподвижного состояния кабины.
Для наиболее распространенных конструкций колодочных тормозов лифтовых лебедок характерно наличие независимых тормозных пружин каждой колодки, а в некоторых случаях, и независимых растормаживающих электромагнитов.
Тормозные накладки закрепляются на колодках посредством винтов, заклепок или приклеиванием термостойким клеем и обеспечивают угол обхвата шкива от 70° до 90°.
Материал накладок должен обеспечивать высокое и стабильное значение коэффициента трения в широком диапазоне температур, хорошую теплопроводность для исключения местного перегрева поверхности трения и высокую износостойкость.
Кинематические схемы колодочных тормозов весьма разнообразны. Они отличаются способом создания тормозного усилия и особенностями конструкции механизма растормаживания.
Лебедки с верхним горизонтальным расположением червяка оборудуются колодочными тормозами, изготовленными по схеме на рис. 3.10.
Тормозное усилие в этих тормозах создается цилиндрическими пружинами, тогда как выключение тормоза осуществляется электромагнитами постоянного или переменного тока, получающими электропитание в момент включения двигателя лебедки.
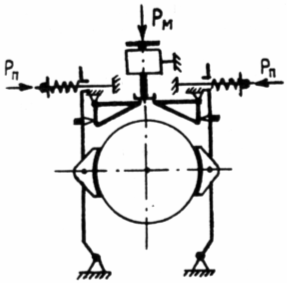
Рис. 3.10. Схема колодочного тормоза лифтовой лебедки с короткоходовым электромагнитом
Тормозные электромагниты различаются величиной хода подвижного сердечника (якоря) и подразделяются на короткоходовые и длинноходовые. В конструкциях колодочных тормозов зарубежного и отечественного производства чаще применяются короткоходовые электромагниты постоянного тока, так как они меньше шумят и имеют лучшие тяговые характеристики (рис. 3.11).
Недостатком электромагнитов постоянного тока является их электромагнитная инерция, связанная с большой индуктивностью катушки. Поэтому возникает возможность запуска двигателя под тормозом. Для исключения такой возможности необходимо обеспечить опережающее включение питания магнита.
Для расчета необходимого тормозного момента рассмотрим два режима: испытательный статический режим с перегрузкой и нормальный эксплуатационный режим.
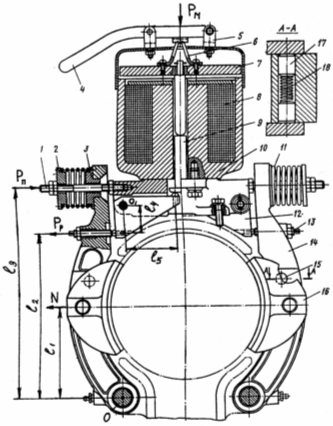
Рис. 3.11. Тормоз с вертикальным расположением электромагнита постоянного тока
1 – шпилька; 2 – фасонная шайба; 3 – втулка опорная; 4 – рычаг; 5 – вилка;
6 – подставка; 7 – якорь; 8 – катушка магнита; 9 – шток; 10 – корпус магнита;
11 – пружина; 12 – двуплечий рычаг; 13 – винт регулировочный; 14 – рычаг;
15 – фиксатор колодки; 16 – колодка
Расчетный тормозной момент определяется по формуле
где  – коэффициент запаса торможения;
– коэффициент запаса торможения;
Wок – окружное усилие на шкиве при удержании испытательного груза, кг;
D – диаметр шкива, м;
i – передаточное отношение редуктора;
 - КПД лебедки.
- КПД лебедки.
По табл. 3.5 [11] определяем  =1,4.
=1,4.
Окружное усилие на шкиве при статическом испытании

где  – коэффициент уравновешивания груза;
– коэффициент уравновешивания груза;
Rп – коэффициент перегрузки (по ПУБЭЛ Rп =1,5 для грузового малого лифта, барабанных лебедок и лебедок со звездочкой, в которых не допускается транспортировка людей, Rп=2,0 у всех остальных).


По величине тормозного момента  выбираем колодочный тормоз ТКП-200 со следующими параметрами:
выбираем колодочный тормоз ТКП-200 со следующими параметрами:
– расчетный тормозной момент 122 Н·м;
– диаметр тормозного шкива 200 мм;
– потребная мощность 160 Вт;
– ток 220/380 В 50 Гц;
– тип привода МП 201;
– масса, не более 35 кг.
Расчет работоспособности колодочного тормоза рассмотрим на примере конструкции, приведенной на рис. 3.11. (необходимые размеры и обозначения указаны на схеме).
Исходные данные:
Мт – расчетный тормозной момент, Мт=114 Н·м;
μ – коэффициент трения между колодкой и шкивом, μ=0,5;
l1=0,125, l2=0,228, l3=0,291, l4=0,035, l5=0,070 – величины соответствующих плеч приложения усилий, м;
Dт – диаметр тормозного шкива, Dт = 0,2 мм.
Величина нормальной реакции тормозного шкива на давление колодки
 (3.23)
(3.23)
Усилия сжатия тормозной пружины при включенном тормозе найдем из уравнения равновесия рычага 14 относительно центра шарнира О
 (3.24)
(3.24)

Давление рычага 12 на регулировочный винт 13 определяем из условия равновесия рычага относительно точки О
 (3.25)
(3.25)
Тяговое усилие электромагнита при выключенном тормозе определим из условия равновесия рычага 12 относительно точки О1
 (3.26)
(3.26)
Ход якоря (подвижного сердечника) электромагнита рассчитываем по заданному значению радиального зазора между колодкой и шкивом ε
 (3.27)
(3.27)
Контактное давление между колодкой и тормозным шкивом
 , (3.28)
, (3.28)
где В – ширина накладки тормозной колодки, м;
β – угол дуги охвата шкива колодкой, рад;
[р] – допускаемая величина контактного давления, зависящая от материала накладки, Н/м2.

Условие выполняется, тормоз подобран правильно.
В нормальном рабочем режиме тормоз должен обеспечивать необходимую точность остановки кабины при заданных величинах замедления. Однако тормозной путь кабины с грузом и без него будет различным. Например, при спуске тормозной путь пустой кабины будет меньше, чем тормозной путь груженой кабины, при подъеме - наоборот.
Точностью остановки кабины называется полуразность тормозных путей груженой и пустой кабины, т.е.
 , (3.29)
, (3.29)
где 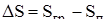 – для спуска;
– для спуска; 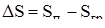 – для подъема.
– для подъема.
Величина  для спуска и подъема различна, поэтому для расчета точности остановки следует брать большую величину. Тормозной путь можно рассчитать, пользуясь зависимостью между работами тормозящих, статических и инерционных сил. Если привести все эти силы к окружности шкива, то можно написать уравнение:
для спуска и подъема различна, поэтому для расчета точности остановки следует брать большую величину. Тормозной путь можно рассчитать, пользуясь зависимостью между работами тормозящих, статических и инерционных сил. Если привести все эти силы к окружности шкива, то можно написать уравнение:
 , (3.30)
, (3.30)
где mп - приведенная к кабине масса всех поступательно и вращательно движущихся частей лифта;
n - скорость кабины;
W0 - статическое окружное усилие на шкиве в рабочем режиме;
Wт- тормозное усилие тормоза, приведенное к окружности шкива;
S - тормозной путь кабины.
Рис. 3.12. Схемы загрузки и направление движения кабины
Знак перед статическим окружным усилием зависит от направления движения и загрузки кабины. При торможении груженой кабины на спуске (рис. 3.12, а) направление сил инерции и окружного усилия совпадает (окружное усилие направлено в сторону ее загруженной ветви). При подъеме пустой кабины (спуск более тяжелого противовеса) направление сил инерции и окружного усилия также совпадает (рис. 3.12, б). Поэтому в формуле (3.30) следует поставить знак плюс. При спуске пустой кабины (рис. 3.12, в) и при подъеме груженой кабины (рис. 3.12, г) направление окружного усилия и сил инерции не совпадает и в этом случае следует принимать знак минус.
Приведенная к кабине масса всех поступательно и вращательно движущихся частей лифта может быть определена по формуле (при движении пустой кабины Q = 0)
 ,
,
где GDл2- маховой момент вращающихся элементов лебедки, приведенной к валу двигателя, H·м2;
i - передаточное отношение лебедки;
D - диаметр шкива.
Маховой момент вращающихся элементов лебедки, приведенный к валу двигателя, можно определить по формуле
 ,
,
где Rн = 1,1...1,2 - коэффициент, учитывающий маховые моменты вращающихся деталей редуктора и шкива;
GDя2 - маховой момент якоря двигателя;
GDT2 - маховой момент тормозной муфты:


Тормозное усилие тормоза, приведенное к окружности канатоведущего шкива, определяется по формуле
 ,
,
где МТ - тормозной момент на валу двигателя.
Из уравнения (3.30) можно определить величину тормозного пути для всех четырех случаев торможения:
Найденные значения тормозного пути подставляем в формулу (3.29) и определяем точность остановки кабины.
Полученное значение точности остановки кабины не превышает норм ПУБЭЛ (±50 мм). Тормоз подобран правильно.
Электрическая часть
Расчет электродвигателя
Потребная мощность двигателя лебедки для обычных лифтов выбирается по условию движения полностью груженой кабины с первого этажа без учета инерционных нагрузок:
 (3.31)
(3.31)
где  – КПД передачи (для червячной передачи η = 0,6…0,8; КПД возрастает с увеличением числа заходов червяка);
– КПД передачи (для червячной передачи η = 0,6…0,8; КПД возрастает с увеличением числа заходов червяка);
 – КПД шкива или барабана (ηшк = 0,94…0,98; меньшие значения относятся к шкивам на подшипниках скольжения, большие – к шкивам на подшипниках качения).
– КПД шкива или барабана (ηшк = 0,94…0,98; меньшие значения относятся к шкивам на подшипниках скольжения, большие – к шкивам на подшипниках качения).
В лифтах с противовесом окружное усилие

Сопротивление на отклоняющих блоках можно с достаточной точностью определить по формуле
 , (3.32)
, (3.32)
где Sбл - усилие в канате при набегании на отклоняющий блок, Н;
 - угол обхвата блока канатами;
- угол обхвата блока канатами;
 - коэффициент сопротивления (для блоков на подшипниках качения ω = 0,02; на подшипниках скольжения ω = 0,04).
- коэффициент сопротивления (для блоков на подшипниках качения ω = 0,02; на подшипниках скольжения ω = 0,04).
Сопротивление на верхнем блоке

Сопротивление на нижнем блоке

Выбираем двигатель АС-2-72-6/18ШЛ со следующими параметрами:
N=3,35/1,18 кВт;
n=950/275 мин-1
Электрическая схема лифта
Схема выполнена для пассажирского лифта грузоподъемностью 500 кг и скоростью движения 1 м/с.
Лифт подготовляется к работе включением рубильника QB1 и автоматического выключателя QF1, после чего на электрические цепи подается ток и лифт готов к работе. Электрическая схема содержит 2 трансформатора Т1 и Т2, один из которых (Т1) обеспечивает требуемое напряжение в цепи привода дверей, а другой питает индикаторные устройства, устройства приказов пассажиров, кнопки и различные датчики внутри шахты. В качестве трансформатора Т1 допускается применить трансформатор типа НТС-0.5 380/100 В для питания электродвигателя привода дверей. На схеме можно увидеть два электродвигателя разной мощности М1 и М2. М1 предназначен для подъема и опускания кабины с противовесом, иными словами для передвижения кабины в шахте. М2 служит приводом для открывания и закрывания дверей. Электромагнит YA1 между контактами ХТ11/1 и ХТ11/2 обеспечивает разомкнутое состояние тормоза во время движения лифта. В нижней части листа расположены возможные варианты схем освещения шахты и диспетчерской связи.
Лифт работает по следующей программе:
а) при нахождении кабины на этаже с закрытыми дверями и нажатии кнопки вызова любого другого этажа кабина должна прийти в движение, выполнить остановку на заданном этаже и автоматически открыть двери;
б) при нахождении кабины на этаже с закрытыми дверями и нажатии кнопки вызова данного этажа у лифта должны открыться двери;
в) при нахождении кабины на этаже с открытыми дверями и нажатии кнопки приказа любого другого этажа двери должны закрыться и кабина направиться на заданный этаж. После остановки кабины на заданном этаже двери автоматически открываются;
г) кабина должна экстренно остановиться, если во время ее движения пассажир нажмет на кнопку «Стоп»;
д) если во время закрытия дверей произойдет защемление створками пассажира, то закрытие дверей прекращается, и они должны автоматически открыться;
е) при движении вниз кабина будет выполнять попутные остановки на этажах, с которых поступили сигналы вызова лифта;
ж) если грузоподъемность кабины составляет 90 % и более от номинальной (не более 100 %), то кабина при движении вниз не будет выполнять остановки на этажах, с которых подаются команды для вызова кабины, а достигнет требуемого этажа и откроет двери.
з) при превышении номинальной грузоподъемности двери кабины не закроются и лифт не переместится на нужный этаж, пока величина груза в кабине не уменьшится до допустимых значений.
Дата: 2019-07-30, просмотров: 451.