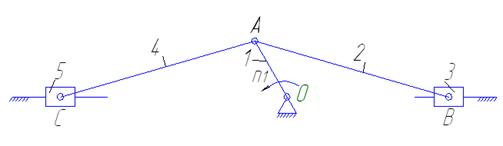
Рисунок 1.1. Подвижные звенья механизма
1-кривошип
2-шатун
3-ползун
4-шатун
5-ползун
Кинематические пары.
О (0-1),вр.,5 кл.
А (1-4),вр.,5 кл.
А'(1-2),вр.,5 кл.
В (2-3),вр.,5 кл.
В'(3-0),пост.,5 кл.
С (4-5),вр.,5 кл.
С'(5-0),пост.,5 кл.
Найдём число степеней свободы.
Запишем формулу Чебышева.
W=3∙n-2∙P5-P4 (1.1)
Где, W-число степеней свободы,
n-число подвижных звеньев,
P4 - число пар 4-го класса,
P5 - число пар 5-го класса.
W=3∙5-2∙7=1
Число степеней свободы рычажного механизма равно 1.
Разобьём механизм на группы Асура и рассмотрим каждую группу в отдельности.
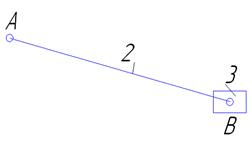 Группа 2-3 (Рисунок 1.2)
Группа 2-3 (Рисунок 1.2)
A'(1-2)-внешняя
B'(3-0)-внешняя
B (2-3)-внутренняя
W=3∙2-2∙3=0
II кл. 2 вид Рисунок 1.2
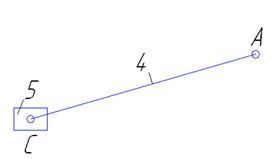 Группа 4-5 (Рисунок 1.3)
Группа 4-5 (Рисунок 1.3)
А (1-4)-внешняя
С' (5-0)-внешняя
C (4-5)-внутренняя
W=3∙2-2∙3=0
II кл. 2 вид
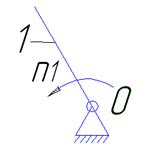
O (0-1)
W=3-2=1
Рисунок 1.4
Составим структурную формулу: 
Механизм является механизмом 2кл.,2в..
Структурный анализ зубчатого механизма
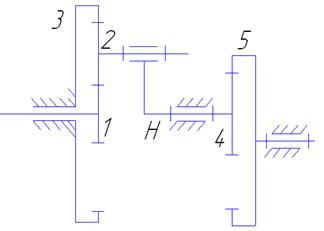
Рисунок 1.5. Подвижные звенья механизма
1 – центральное колесо
2 – сателлит
3 – зубчатое колесо
H – водило
4 – зубчатое колесо
5 – зубчатое колесо
Кинематические пары.
(1-0),вр.,5 кл.
(5-0),вр.,5 кл.
(2-H),вр.,5 кл.
(4-0),вр.,5 кл.
(1-2),вр.,4 кл.
(2-3),вр.,4 кл.
(4-5),вр.,4 кл.
Найдём число степеней свободы.
Исходя из формулы Чебышева имеем,
W=3∙4-2∙4-3=1
Число степеней свободы зубчатого механизма равно 1, следовательно, данный механизм является планетарным.
Структурный анализ кулачкового механизма

Рисунок 1.6. Подвижные звенья механизма
1-кулачок
2-ролик
3-коромысло
Кинематические пары.
О (1-0),вр.,5 кл.
А (3-0),вр.,5 кл.
В (2-3),вр.,5 кл.
С (1-2),пост.,4 кл.
Найдём число степеней свободы.
W=3∙n-2∙P5-P4
W=3∙3-2∙3-1=2
Число степеней свободы равно 2.
Так как W≠1, то присутствует лишнее звено - ролик.
Динамический анализ рычажного механизма
Определение скоростей
Для заданной схемы механизма строим 12 положений.
Определяем масштабный коэффициент построения механизма:
 (2.1)
(2.1)
где,  - масштабный коэффициент,
- масштабный коэффициент, 
 - длина звена,
- длина звена, 
 - длина звена на чертеже,
- длина звена на чертеже, 
Запишем длинны звеньев механизма на чертеже

Приступаем к построению повёрнутых планов скоростей для каждого положения. Рассмотрим пример построения для положения №5:
У кривошипа определяем скорость точки А
 (2.2)
(2.2)
где,  - длина звена,
- длина звена,
 - угловая скорость кривошипа,
- угловая скорость кривошипа, 



Для построения вектора скорости точки А определяем масштабный коэффициент
 (2.3)
(2.3)
где,  - скорость точки А,
- скорость точки А, 
 - вектор скорости точки А,
- вектор скорости точки А,
 - полюс, выбираемый произвольно
- полюс, выбираемый произвольно

Для определения скорости точки B запишем систему уравнений:
 (2.4)
(2.4)

 - из задания
- из задания
Для определения скорости центра масс 2-го звена S2 воспользуемся соотношением:
 (2.5)
(2.5)
где,  ,
,  - расстояния между соответствующими точками на механизме, м
- расстояния между соответствующими точками на механизме, м
 ,
,  - длинны векторов скоростей на плане, мм
- длинны векторов скоростей на плане, мм
 мм
мм
Соединив, точку  и π получим скорость центра масс второго звена.
и π получим скорость центра масс второго звена.

Для определения скорости точки C запишем систему уравнениё:
 (2.6)
(2.6)

 - из задания
- из задания
Для определения скорости центра масс 4-го звена S4 воспользуемся соотношением:
 (2.7)
(2.7)
где,  , - расстояния между соответствующими точками на механизме, м
, - расстояния между соответствующими точками на механизме, м
 ,
,  - длинны векторов скоростей на плане, мм
- длинны векторов скоростей на плане, мм
 мм
мм
Соединив, точку и π получим скорость центра масс второго звена.

Определим значения угловых скоростей звеньев.



Направление  определяем, перенеся вектор ab в точку S2 – второе звено вращается против часовой стрелки. Аналогично получим, что
определяем, перенеся вектор ab в точку S2 – второе звено вращается против часовой стрелки. Аналогично получим, что  направлена по часовой стрелке.
направлена по часовой стрелке.
Скорости точек остальных положений определяются аналогичным образом. Все значения сводим в таблицу(2.1).
Таблица 2.1 – Значения линейных и угловых скоростей
| N положения | VB=VS3,

| VS2,
| VС=VS5,
| VS4,
| VBA= VCA,

|  = , = ,

|
| 1 | 0 | 5,58 | 0 | 5,58 | 8,37 | 33,48 |
| 2 | 5,36 | 6,66 | 3,01 | 6,14 | 7,34 | 29,37 |
| 3 | 8,46 | 8,14 | 6,04 | 7,39 | 4,36 | 17,42 |
| 4 | 8,37 | 8,37 | 8,37 | 8,37 | 0 | 0 |
| 5 | 6,04 | 7,39 | 8,46 | 8,14 | 4,36 | 17,42 |
| 6 | 3,01 | 6,14 | 5,36 | 6,66 | 7,34 | 29,37 |
| 7 | 0 | 5,58 | 0 | 5,58 | 8,37 | 33,48 |
| 8 | 3,01 | 6,14 | 5,36 | 6,66 | 7,34 | 29,37 |
| 9 | 6,04 | 7,39 | 8,46 | 8,14 | 4,36 | 17,42 |
| 10 | 8,37 | 8,37 | 8,37 | 8,37 | 0 | 0 |
| 11 | 8,46 | 8,14 | 6,04 | 7,39 | 4,36 | 17,42 |
| 12 | 5,36 | 6,66 | 3,01 | 6,14 | 7,34 | 29,37 |
Дата: 2019-07-24, просмотров: 361.