КУРСОВОЙ ПРОЕКТ
на тему: «Механизмы компрессора»
Структурный анализ механизмов
Структурный анализ рычажного механизма
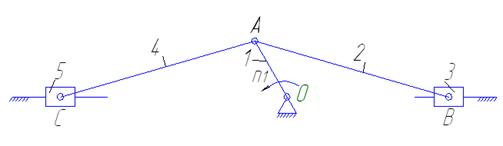
Рисунок 1.1. Подвижные звенья механизма
1-кривошип
2-шатун
3-ползун
4-шатун
5-ползун
Кинематические пары.
О (0-1),вр.,5 кл.
А (1-4),вр.,5 кл.
А'(1-2),вр.,5 кл.
В (2-3),вр.,5 кл.
В'(3-0),пост.,5 кл.
С (4-5),вр.,5 кл.
С'(5-0),пост.,5 кл.
Найдём число степеней свободы.
Запишем формулу Чебышева.
W=3∙n-2∙P5-P4 (1.1)
Где, W-число степеней свободы,
n-число подвижных звеньев,
P4 - число пар 4-го класса,
P5 - число пар 5-го класса.
W=3∙5-2∙7=1
Число степеней свободы рычажного механизма равно 1.
Разобьём механизм на группы Асура и рассмотрим каждую группу в отдельности.
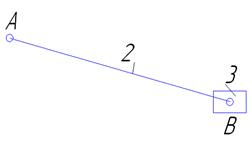 Группа 2-3 (Рисунок 1.2)
Группа 2-3 (Рисунок 1.2)
A'(1-2)-внешняя
B'(3-0)-внешняя
B (2-3)-внутренняя
W=3∙2-2∙3=0
II кл. 2 вид Рисунок 1.2
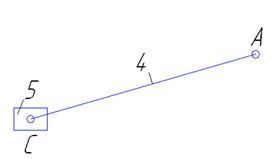 Группа 4-5 (Рисунок 1.3)
Группа 4-5 (Рисунок 1.3)
А (1-4)-внешняя
С' (5-0)-внешняя
C (4-5)-внутренняя
W=3∙2-2∙3=0
II кл. 2 вид
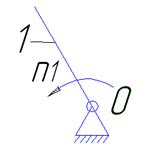
O (0-1)
W=3-2=1
Рисунок 1.4
Составим структурную формулу: 
Механизм является механизмом 2кл.,2в..
Структурный анализ зубчатого механизма
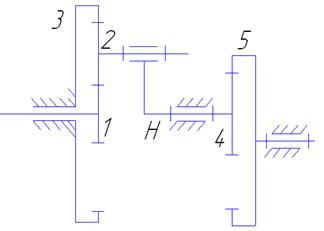
Рисунок 1.5. Подвижные звенья механизма
1 – центральное колесо
2 – сателлит
3 – зубчатое колесо
H – водило
4 – зубчатое колесо
5 – зубчатое колесо
Кинематические пары.
(1-0),вр.,5 кл.
(5-0),вр.,5 кл.
(2-H),вр.,5 кл.
(4-0),вр.,5 кл.
(1-2),вр.,4 кл.
(2-3),вр.,4 кл.
(4-5),вр.,4 кл.
Найдём число степеней свободы.
Исходя из формулы Чебышева имеем,
W=3∙4-2∙4-3=1
Число степеней свободы зубчатого механизма равно 1, следовательно, данный механизм является планетарным.
Структурный анализ кулачкового механизма

Рисунок 1.6. Подвижные звенья механизма
1-кулачок
2-ролик
3-коромысло
Кинематические пары.
О (1-0),вр.,5 кл.
А (3-0),вр.,5 кл.
В (2-3),вр.,5 кл.
С (1-2),пост.,4 кл.
Найдём число степеней свободы.
W=3∙n-2∙P5-P4
W=3∙3-2∙3-1=2
Число степеней свободы равно 2.
Так как W≠1, то присутствует лишнее звено - ролик.
Динамический анализ рычажного механизма
Определение скоростей
Для заданной схемы механизма строим 12 положений.
Определяем масштабный коэффициент построения механизма:
 (2.1)
(2.1)
где,  - масштабный коэффициент,
- масштабный коэффициент, 
 - длина звена,
- длина звена, 
 - длина звена на чертеже,
- длина звена на чертеже, 
Запишем длинны звеньев механизма на чертеже

Приступаем к построению повёрнутых планов скоростей для каждого положения. Рассмотрим пример построения для положения №5:
У кривошипа определяем скорость точки А
 (2.2)
(2.2)
где,  - длина звена,
- длина звена,
 - угловая скорость кривошипа,
- угловая скорость кривошипа, 



Для построения вектора скорости точки А определяем масштабный коэффициент
 (2.3)
(2.3)
где,  - скорость точки А,
- скорость точки А, 
 - вектор скорости точки А,
- вектор скорости точки А,
 - полюс, выбираемый произвольно
- полюс, выбираемый произвольно

Для определения скорости точки B запишем систему уравнений:
 (2.4)
(2.4)

 - из задания
- из задания
Для определения скорости центра масс 2-го звена S2 воспользуемся соотношением:
 (2.5)
(2.5)
где,  ,
,  - расстояния между соответствующими точками на механизме, м
- расстояния между соответствующими точками на механизме, м
 ,
,  - длинны векторов скоростей на плане, мм
- длинны векторов скоростей на плане, мм
 мм
мм
Соединив, точку  и π получим скорость центра масс второго звена.
и π получим скорость центра масс второго звена.

Для определения скорости точки C запишем систему уравнениё:
 (2.6)
(2.6)

 - из задания
- из задания
Для определения скорости центра масс 4-го звена S4 воспользуемся соотношением:
 (2.7)
(2.7)
где,  , - расстояния между соответствующими точками на механизме, м
, - расстояния между соответствующими точками на механизме, м
 ,
,  - длинны векторов скоростей на плане, мм
- длинны векторов скоростей на плане, мм
 мм
мм
Соединив, точку и π получим скорость центра масс второго звена.

Определим значения угловых скоростей звеньев.



Направление  определяем, перенеся вектор ab в точку S2 – второе звено вращается против часовой стрелки. Аналогично получим, что
определяем, перенеся вектор ab в точку S2 – второе звено вращается против часовой стрелки. Аналогично получим, что  направлена по часовой стрелке.
направлена по часовой стрелке.
Скорости точек остальных положений определяются аналогичным образом. Все значения сводим в таблицу(2.1).
Таблица 2.1 – Значения линейных и угловых скоростей
| N положения | VB=VS3,

| VS2,
| VС=VS5,
| VS4,
| VBA= VCA,

|  = , = ,

|
| 1 | 0 | 5,58 | 0 | 5,58 | 8,37 | 33,48 |
| 2 | 5,36 | 6,66 | 3,01 | 6,14 | 7,34 | 29,37 |
| 3 | 8,46 | 8,14 | 6,04 | 7,39 | 4,36 | 17,42 |
| 4 | 8,37 | 8,37 | 8,37 | 8,37 | 0 | 0 |
| 5 | 6,04 | 7,39 | 8,46 | 8,14 | 4,36 | 17,42 |
| 6 | 3,01 | 6,14 | 5,36 | 6,66 | 7,34 | 29,37 |
| 7 | 0 | 5,58 | 0 | 5,58 | 8,37 | 33,48 |
| 8 | 3,01 | 6,14 | 5,36 | 6,66 | 7,34 | 29,37 |
| 9 | 6,04 | 7,39 | 8,46 | 8,14 | 4,36 | 17,42 |
| 10 | 8,37 | 8,37 | 8,37 | 8,37 | 0 | 0 |
| 11 | 8,46 | 8,14 | 6,04 | 7,39 | 4,36 | 17,42 |
| 12 | 5,36 | 6,66 | 3,01 | 6,14 | 7,34 | 29,37 |
Определение ускорений
Определяем угловое ускорение звена 1.
 , (3.1)
, (3.1)
где,  - момент от сил движущих,
- момент от сил движущих, 
 - момент от сил сопротивления,
- момент от сил сопротивления,
 - приведённый момент инерции маховика,
- приведённый момент инерции маховика, 
 - приведённый момент инерции рычажного механизма для расчётного положения,
- приведённый момент инерции рычажного механизма для расчётного положения,
 - первая производная от приведённого момента инерции механизма для расчётного положения
- первая производная от приведённого момента инерции механизма для расчётного положения
 , (3.2)
, (3.2)
где,  - масштабный коэффициент по оси
- масштабный коэффициент по оси  ,
, 
 - масштабный коэффициент по оси φ,
- масштабный коэффициент по оси φ, 
 - угол между касательной, проведённой к кривой графика
- угол между касательной, проведённой к кривой графика  в расчётном положении и осью φ.
в расчётном положении и осью φ. 


Знак минуса говорит о том, что кривошип ОА замедляется. Направляем  против направления
против направления  и берём значение ускорения по модулю.
и берём значение ускорения по модулю.
Строим план ускорений для расчётного положения.
Скорость точки А определяем по формуле
 , (3.3)
, (3.3)
где,  - ускорение точки А,
- ускорение точки А, 
 - нормальное ускорение точки А относительно точки О,
- нормальное ускорение точки А относительно точки О,
 - тангенциальное (касательное) ускорение точки А,
- тангенциальное (касательное) ускорение точки А,
Ускорение  найдём по формуле:
найдём по формуле:
 , (3.4)
, (3.4)
где,  - угловая скорость кривошипа,
- угловая скорость кривошипа, 
 - длина звена ОА, м
- длина звена ОА, м

Ускорение  найдём по формуле:
найдём по формуле:
 , (3.5)
, (3.5)

Из произвольно выбранного полюса  откладываем вектор
откладываем вектор  длиной 100 мм. Найдём масштабный коэффициент плана скоростей.
длиной 100 мм. Найдём масштабный коэффициент плана скоростей.
 , (3.6)
, (3.6)

Определим длину вектора  :
:
Ускорение точки А определим из следующеё формулы:

Определим ускорение точки B из следующей системы уравнений:
 , (3.7)
, (3.7)
Для определения нормальных ускорений точки В относительно точек А и С
Воспользуемся следующими формулами:

Определим длину векторов  :
:

Ускорение направляющей  равно нулю, т.к. она неподвижна.
равно нулю, т.к. она неподвижна.
Кореолисово ускорение точки В относительно направляющей  рано нулю, т.к. точка В движется только поступательно относительно .
рано нулю, т.к. точка В движется только поступательно относительно .
Ускорение точки В найдём, решив системе (3.7) векторным способом:
Из вершины вектора ускорения точки А (  ) откладываем вектор
) откладываем вектор  (параллелен звену АВ и направлен от В к А), из вершины вектора
(параллелен звену АВ и направлен от В к А), из вершины вектора
проводим прямую перпендикулярную звену АВ (линия действия  ); из полюса
); из полюса  проводим горизонтальную прямую (линия действия
проводим горизонтальную прямую (линия действия  ); на пересечении линий действия векторов
); на пересечении линий действия векторов  и
и  получим точку b, соединив полученную точку с полюсом, получим вектор ускорения точки В.
получим точку b, соединив полученную точку с полюсом, получим вектор ускорения точки В.
Из плана ускорений определяем вектор ускорения точки В и вектор тангенциального ускорения  :
:


Ускорение сочки С определяем аналогично ускорению точки B.

Определим длину векторов  :
:




Из полученных тангенциальных ускорений найдём угловые ускорения 2-го и 3-го звеньев:

Определим ускорения центров масс звеньев:
Ускорение центра масс 2-го звена  найдём из соотношения (3.10)
найдём из соотношения (3.10)
 (3.8)
(3.8)
Из плана ускорений  мм
мм
 мм
мм
 мм
мм

Ускорение центра масс 4-го звена  найдём из соотношения (3.11)
найдём из соотношения (3.11)
 (3.9)
(3.9)
Из плана ускорений  мм
мм
 мм
мм
 мм
мм

Ускорения центров масс 3-го и 5-го звеньев равны ускорениям точек D и D’ соответственно:
Значения всех ускорений сведём в таблицу:
Таблица 3.1 – Ускорения звеньев
| Ускорение точек механизма | Значение,
| Ускорение центров масс и угловые ускорения | значение, , 
|

| 
| 
| 
|

| 
| 
| 
|

| 
| 
| 
|

| 
| 
| 
|

| 
| 
| 
|

|
| 
| 
|

|
| 
| 
|

| 
| --- | --- |

| 
| --- | --- |
Определение углов давления
Найдём зависимость угла давления  от угла
от угла  .
.
 (5.7)
(5.7)
где,  - угол давления,
- угол давления, 
 - расстояние
- расстояние  ,
, 
 - длина коромысла АВ,
- длина коромысла АВ,
 - отрезок скорости,
- отрезок скорости,
 - угол между отрезком АВ и расчётной прямой на чертеже,
- угол между отрезком АВ и расчётной прямой на чертеже, 
Произведём расчёт при 


Остальные значения угла давления определяем аналогично, и результаты сносим в таблицу
Таблица 5.1 – Углы давления

| 0 | 14,37 | 27,75 | 43,12 | 57,5 | 71,87 | 86,25 | 100,62 | 115 |

| -13,56 | 13,91 | 30,29 | 35,8 | 35,27 | 32,23 | 26,84 | 19,45 | 10,04 |
|
| 135 | 152,5 | 170 | 187,5 | 205 | 222,5 | 240 | 257,5 | 275 |
|
| 10,04 | -0,31 | -10,52 | -19,58 | -27,28 | -34,7 | -36,88 | -30,67 | -13,56 |
При построении используем следующие масштабные коэффициенты
Литература
1. Артоболевский И.И. Теория механизмов и машин; Учеб. для втузов. – 4-е изд., перераб. и доп. – М.: Наука. 1988;
2. Девойно Г.Н. Курсовое проектирование по теории механизмов и машин. 1986.
КУРСОВОЙ ПРОЕКТ
на тему: «Механизмы компрессора»
Структурный анализ механизмов
Дата: 2019-07-24, просмотров: 311.