Функции по переработке информации возлагаются на вычислительный комплекс, который в простейшем случае представляет собой одиночную ЭВМ, а в сложных АСУ РВ - многомашинную или многопроцессорную вычислительную систему. Можно выделить следующие виды средств переработки информации в АСУ реального времени.
1. Контроллер на базе персонального компьютера. Основные сферы использования - небольшие специализированные системы автоматизации в медицине, научных лабораториях, средствах коммуникации и для АСУТП небольших объектов с числом входов/ выходов порядка нескольких десятков. Выполняемые функции - обработка измерительной информации.
2. Локальный контроллер. Используются два типа таких контроллеров: 1) встраиваемый в оборудование и являющийся его неотъемлемой частью (станки с числовым программным управлением, автомашинисты, аналитические приборы); 2) автономные, реализующие функции контроля и управления небольшим изолированным объектом. Локальные контроллеры рассчитаны на десятки входов/выходов, они имеют интерфейсы для связи с другими средствами автоматизации.
3. Сетевой комплекс контроллеров. Это наиболее распространенный тип. Его минимальный состав - набор контроллеров, дисплейные пульты операторов, промышленная сеть для передачи коротких сообщений. Функции этих контроллеров - контроль и управление с числом входов/выходов порядка тысяч.
4. Распределенные системы управления малого масштаба. Основное отличие от предыдущего типа - большее разнообразие модификаций, блоков ввода/вывода, панелей оператора; большая мощность центральных процессоров контроллеров, позволяющая им обрабатывать более 10000 входных/выходных сигналов; выделение отдельных конструктивов удаленных блоков ввода/вывода, рассчитанных на работу в различных условиях окружающей среды. Эти контроллеры могут поддерживать несколько уровней сетей - полевые сети для связи с датчиками, сети первого уровня для связи контроллеров между собой и сети второго уровня для связи с оператором всего участка производства.
5. Полномасштабные распределенные системы управления. Этот тип контроллеров практически не имеет ограничений ни по выполняемым функциям, ни по объему автоматизируемого объекта. Дополнительно к рассмотренным ранее возможностям эти контроллеры имеют следующие свойства:
- наличие промышленных сетей, позволяющих подсоединять к одной шине сотни узлов (контроллеров и пультов);
- использование информационных сетей для связи пультов операторов друг с другом, для связи с серверами, с корпоративной сетью предприятия;
- взаимодействие пультов управления в клиент-серверном режиме;
- наличие в составе программного комплекса пакетов, реализующих функции эффективного управления отдельными агрегатами (многосвязное регулирование, оптимизация и т.п.), диспетчерского управления участками производства (поддержка принятия управленческих решений), технического учета и планирования производства в целом.
Одиночные ЭВМ могут представлять собой микроконтроллеры, скалярные, суперскалярные и векторные процессоры с системами памяти, устройствами управления и средствами ввода/вывода.
Индустриальная рабочая станция — это системный блок, дисплей и клавиатура в одном конструктиве.
Скалярный процессор - это программно-управляемое устройство для обработки цифровой информации и управления процессом обработки, содержащее минимально необходимый набор устройств для выполнения этих операций: операционное (арифметико-логическое) устройство с устройством управления, внутреннюю сверхоперативную память и внутреннюю шину для обмена информацией.
Суперскалярный процессор имеет несколько операционных устройств, что позволяет ему вести параллельную обработку информации.
Векторный процессор имеет структуру и систему команд, обеспечивающие возможность выполнения векторных операций.
Многомашинная система состоит из нескольких машин, каждая из которых имеет свою внутреннюю память и работает под управлением своей операционной системы, и средства обмена информацией между машинами.
Мультипроцессорные системы имеют следующие отличительные особенности: наличие единой операционной системы и общих периферийных устройств; возможность перераспределения программ между процессорами; возможность прерывания работы одних процессоров в зависимости от работы других.
Микроконтроллеры
Микроконтроллер - это законченная микропроцессорная система обработки информации, реализованная в виде БИС и объединяющая в пределах одного полупроводникового кристалла центральный процессор, постоянное запоминающее устройство (ПЗУ), основную память - оперативное запоминающее устройство (ОЗУ) и устройства ввода/вывода информации.
Однокристальному микроконтроллеру (ОМК) присущи следующие особенности:
- система команд ориентирована на выполнение задач управления и регулирования;
- алгоритмы, которые реализуются на ОМК, могут иметь много разветвлений в зависимости от внешних сигналов;
- данные, с которыми оперируют ОМК, имеют небольшую разрядность;
- схемная реализация систем управления на базе ОМК является несложной и имеет невысокую стоимость;
- универсальность и возможность расширения функций управления значительно ниже, чем в системах с однокристальными микропроцессорами.
Все ОМК одного семейства содержат в себе одинаковый базовый функциональный блок и различные изменяемые функциональные блоки. Базовый блок принято называть процессорным ядром ОМК.
В состав процессорного ядра входят:
- центральный процессор;
- внутренние шины адреса, данных и управления;
- схемы синхронизации, формирующие многофазные импульсные последовательности для тактирования центрального процессора и шин;
- схема управления режимами работы ОМК.
Ядро современных ОМК реализуют как на основе CISC-, так и на основе RISC-архитектуры.
ОМК с CISC-архитектурой имеют однобайтовый, двухбайтовый и трехбайтовый (реже четырехбайтовый) формат команд. Выборка команды из памяти осуществляется побайтно в течение нескольких машинных циклов. Время выполнения каждой команды с учетом времени выборки в большинстве случаев составляет от 1 до 10 циклов.
ОМК с RISC-архитектурой имеет фиксированный формат команды (12, 14 или 16 бит). Выборка из памяти и исполнение подавляющего большинства команд осуществляется за один машинный цикл.
Модульная структура ОМК показана на рис. 13.1. Изменяемый функциональный блок включает модули основной и постоянной (ОЗУ и ПЗУ) памяти, генератор схемы синхронизации (Г) и модули внешних устройств. К внешним устройствам обычно относятся: порты ввода/вывода, таймеры, аналого-цифровые преобразователи (АЦП), контроллеры последовательного ввода/вывода (К).
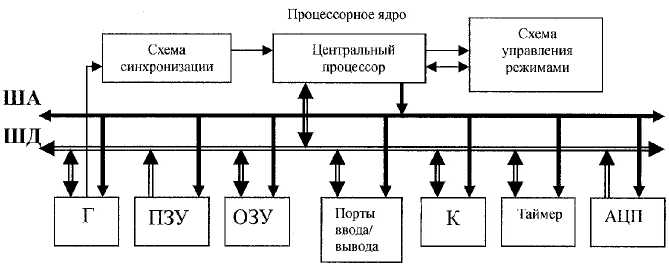
Рисунок 13.1
В последних разработках в состав изменяемых модулей включают модули контроля за напряжением питания и ходом выполнения программы и модули внутрисхемной отладки и программирования.
Каждый модуль имеет выводы для подключения его к шинам адреса (ША) и данных (ШД) процессорного ядра.
Дата: 2019-04-23, просмотров: 399.