В зависимости от источника возникновения принято различать методические и инструментальные погрешности.
Методические погрешности АЦП являются следствием квантования дискретной величины сигнала по уровню и связанного с этим округления результата из-за конечного числа разрешенных уровней квантования. Исследованию этих погрешностей посвящено большое количество работ, поскольку в общем случае эти погрешности имеют сложный характер и многообразные формы проявления.
В простейшем случае, когда шкала уровней равномерна и шаг квантования постоянный, максимальная погрешность квантования зависит от способа отождествления сигнала с уровнем квантования. Для случая отождествления с ближайшим меньшим уровнем максимальная погрешность ∆xk = max |x(t) - yk| = q; для случая отождествления с ближайшим уровнем ∆xk = 0,5q. Рассматривая сигнал x(ti) = x как реализацию случайной величины X с плотностью распределения f(x), найдем для этого случая математическое ожидание погрешности:
Полагая, что величина q мала по сравнению с диапазоном изменения сигнала, примем, что f(x) = f(xk). При этом условии M[∆xk] = 0. Соотношение для оценки дисперсии погрешности
при аналогичном условии получает следующий вид:

Обозначим вероятность попадания величины X в k-й интервал через pk . При малом q можно принять pk≈f(xk)q. Поэтому
Суммируя по всему диапазону (k = 1,2,...,N), получаем, что
Инструментальные погрешности возникают вследствие отклонения параметров и характеристик элементов АЦП от идеальных и (или) заданных. К их числу относятся: смещение нуля и изменение крутизны передаточной характеристики (вход-выход) АЦП, а также погрешности, вызванные нелинейностью. Эти погрешности относятся к наиболее трудно устранимым, поскольку их нельзя устранить регулировкой.
Различают интегральную и дифференциальную нелинейность.
Интегральная нелинейность - это максимальное отклонение разности двух входных аналоговых сигналов, вызывающих последовательную смену выходных кодов АЦП, от значения, соответствующего единице младшего разряда кода при нулевых значениях погрешностей смещения нуля и изменения крутизны. Она выражается в долях младшего разряда или в процентах от предела шкалы. Интегральная нелинейность (или просто нелинейность) служит оценкой кривизны передаточной характеристики АЦП в целом.
Если каждый переход от одного кода к смежному происходит при одинаковых приращениях входного сигнала, равных единице младшего разряда, то интегральная нелинейность равна нулю.
Дифференциальная нелинейность - это отклонение передаточной характеристики АТ ЦП от идеальной в точках, каждая из которых равноудалена от двух соседних уровней квантования. Дифференциальная нелинейность измеряется в долях или процентах от младшего разряда. Она характеризует девиацию шага квантования и монотонность преобразования. Если дифференциальная нелинейность превышает единицу младшего разряда, то возможен пропуск кода.
На рис. 12.2 абсцисса - входное напряжение, а ордината - двоичный код на выходе преобразователя. Пунктирная прямая - это передаточная характеристика идеального преобразователя.
Сплошной линией показано смещение нуля преобразователя. В диапазоне входных напряжений, соответствующих выходным кодам 00000...00100, преобразователь работает идеально. В диапазоне кодов 00100...01001 определяется «монотонная нелинейность» - изменение крутизны передаточной характеристики. В диапазоне 01001...10011 нелинейность имеет немонотонный характер, который описывается дифференциальной и интегральной нелинейностями. Случай пропуска кода показан для кода 10010.
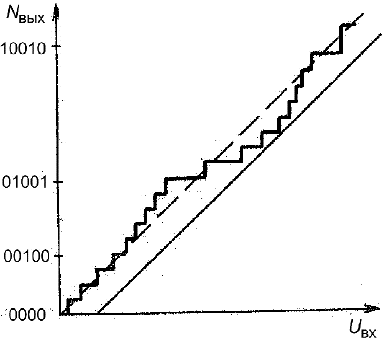
Рисунок 12.2
Дифференциальная нелинейность характерна для преобразователей последовательной аппроксимации, что объясняется использованием в ЦАП взвешенных источников тока. Для интегрирующих АЦП преобладающей является интегральная нелинейность, обусловленная главным образом нелинейностью интегратора.
Изменение температуры окружающей среды является причиной изменения величины смещения нуля, крутизны передаточной характеристики и нелинейности.
Обычно справочные данные по АЦП (в том числе - по нелинейности) приводятся для статического режима, т.е. они измеряются при неизменном входном сигнале. Однако в динамическом режиме передаточная характеристика существенно изменяется.
Динамические свойства АЦП определяются переходными процессами в аналоговых электронных схемах, временем развертки значений меры и формирования цифрового эквивалента. Суммарное время составляет время преобразования. Полное время цикла преобразования включает в себя также время на установку преобразователя в исходное состояние и время для синхронизации с началом такта.
Одно из проявлений переходных процессов в аналоговых цепях - задержка истинного момента запуска АЦП относительно номинального (апертурное время tа). Поскольку апертурное время - величина случайная, то оно вносит неустранимую погрешность: за время tа входной сигнал может измениться на величину tаx'(t), где x'(t) - скорость изменения входного сигнала в момент t. Полная динамическая погрешность определяется полным временем цикла преобразования. Динамическая погрешность связывает характеристики преобразователя и свойства измеряемого процесса, поскольку максимальная производная x'max связана с частотой среза fс спектра входного сигнала, имеющего максимальное значение xmax, соотношением x'max ≤ 2πfс|xmax|.
Динамическая погрешность проявляется только в том случае, если она превышает разрешающую способность преобразователя.
Разрешающая способность определяется как минимальная величина изменения входного сигнала, вызывающая изменение выходного кода на единицу младшего разряда. Она может задаваться в процентах от полного диапазона, в единицах измерения входной величины или, как это чаще всего делается, числом разрядов преобразователя.
Контрольные вопросы и упражнения
1. Постройте временные диаграммы, поясняющие работу преобразователя последовательного счета и появление задержек ∆t1 и ∆t2.
2. Разработайте блок-схему преобразователя фазы в код.
3. Разработайте блок-схему АЦП последовательного счета.
4. Запишите в формализованном виде алгоритм метода поразрядного кодирования.
5. Разработайте блок-схему АЦП следящего преобразования.
6. Предложите принцип адаптивного преобразования и блок-схему преобразователя (указание: нужно задаться величиной его разрешающей способности).
7. Предложите схему простого интегрирующего преобразователя (с однократным интегрированием). Укажите основные источники погрешностей этого преобразователя.
8. Напишите формулу для оценки погрешности интегрирующего преобразователя, возникающей из-за нелинейности интегратора.
9. Выведите зависимость между частотой среза входного сигнала и его максимальной производной.
10. Нарисуйте, как зависит от величины входного сигнала погрешность квантования:
а) для двух способов отождествления сигнала с уровнем квантования при идеальной передаточной характеристике;
б) при смещении нуля передаточной характеристики;
в) при изменение крутизны передаточной характеристики;
г) при наличии интегральной нелинейности;
д) при наличии дифференциальной нелинейности.
11. Нарисуйте временную диаграмму работы преобразователя и покажите на ней временные характеристики АЦП и период дискретизации входного сигнала. Что ограничивает сверху и снизу частоту дискретизации?
12. Проведите анализ совместной работы схемы выборки-хранения (СВХ) и АЦП. Какие погрешности характеризуют их совместную работу? При каких условиях можно исключить СВХ на входе АЦП?
13. От каких параметров АЦП зависит его стоимость? Предложите варианты этой зависимости.
Дата: 2019-04-23, просмотров: 377.