Появление устройств продольной и поперечной компенсации второго поколения (на полностью управляемых силовых ключах) стало предпосылкой для создания нового адаптивного устройства, способного воздействовать на все параметры, определяющие функционирование линий электропередач. Такое устройство получило название объединенного регулятора потоков мощности (ОРПМ), который является комбинированным устройством из-за специфики исполнения (рис. 5.11).
Принцип работы ОРПМ основан на совместном управлении двумя преобразователями напряжения, объединенных источником напряжения (конденсаторной батареей КБ) на стороне постоянного тока. Преобразователь ПН1 подключается параллельно к линии через трансформатор связи Т1 и обеспечивает генерацию активной мощности преобразователя ПН2 за счет ее потребления из электрической сети. Последний вводит в линию добавочное напряжение ∆U, регулируемое по величине и фазе, через вольтодобавочный трансформатор Т2. Вводимое напряжение плавно изменяется в широком диапазоне значений как по модулю, ∆U = 0÷∆Uзад, так и по фазе, 0÷2π, что делает возможной работу ОРПМ в режимах всех устройств, описанных ранее.
Таким образом, ОРПМ объединяет всю совокупность преимуществ существующих устройств и даже их превосходит по некоторым характеристикам. Он может управлять потоками активной и реактивной мощности в обоих направлениях, обеспечивая при этом широкий диапазон регулирования ими.
На рис.5.12 представлены возможные исполнения ОРПМ на мощных биполярных транзисторах с изолированным затвором (БТИЗ).
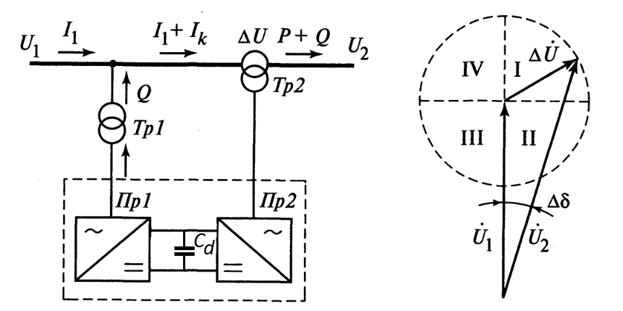
Рис.5.11. ОРПМ: а) схема устройства; б) векторная диаграмма линии с ОРПМ.
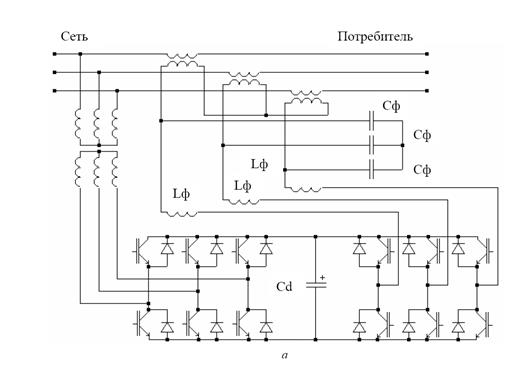
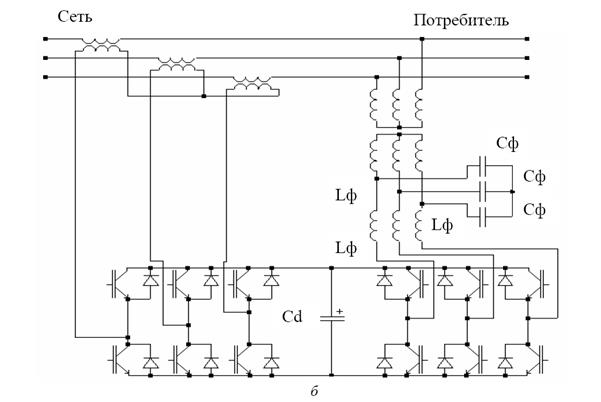
Рис. 5.12
Литература для самостоятельных занятий: [3], Гл.5. стр. 157-160
Приложение
Системы регулирования
Понятие системы управления и системы регулирования
Система управления (СУ) устройство, обеспечивающее формирование управляющих сигналов силовых ключей в необходимые моменты времени для обеспечения функций:
- пуска и остановки преобразователя,
- регулирования выходных величин (напряжения, тока, мощности и пр.),
- защиты преобразователя при возникновении аварийных режимов его работы, а также диагностики состояния преобразователя.
Система регулирования
Преобразователь в совокупности с нагрузкой представляют собой автоматическую систему регулирования. В соответствии с принятыми понятиями теории автоматического управления:
Нагрузка - Управляемый объект УО (см. рис.1);
Преобразователь - Управляющее устройство УУ (регулятор), т.е. устройство, воздействующее на УО - нагрузку.
Состояние УО (в зависимости от его устройства и функций) определяется рядом величин: - напряжением, током, мощностью, температурой, скоростью и т.п.

Рис.1 Структура системы регулирования
По характеру использования информации различают замкнутые и разомкнутые системы регулирования:
Замкнутые системы – такие системы, в которых для формирования управляющего воздействия используются информация о действительном значении управляемой величины.
Разомкнутые системы – такие системы, в которых для формирования управляющего воздействия не используются информация о действительном значении управляемой величины.
По характеру воздействия во времени (характеру сигналов) преобразователь относится к непрерывно-дискретным системам, в которых есть как непрерывные, так и дискретные сигналы, т.е. сигналы определенные только в отдельные моменты времени.
В непрерывной системе необходимая для управления информация есть в любой момент времени, сигналы (воздействия) в ней непрерывны во времени и по уровню. Связи между элементами сохраняются всегда, т.е. любое непрерывное изменение входного сигнала во времени вызывает также непрерывное изменение входных и выходных сигналов у всех последующих элементов. В системах прерывистого регулирования (дискретных), связи между элементами сохраняются не всегда. Такие системы содержат элемент, который при непрерывном изменении сигнала на входе передаст его дальше прерывисто.
Замкнутые системы по принципу регулирования делятся на:
- системы регулирования по ошибке (отклонению)
- релейные системы регулирования.
Регулирование по ошибке. Идея принципа состоит в том, что определяется ошибка между заданным и истинным значением регулируемой величины. В зависимости от значения и знака этой ошибки осуществляется регулирующее воздействие на объект регулирования, сводящее эту ошибку к нулю, т.е. обеспечивающее тем самым изменение регулируемой величины по требуемому закону.
Релейная система регулирования - система автоматического регулирования, устойчивое функционирование которой обеспечивается периодическим переключением направления движения. При этом управляющее воздействие может принимать ограниченное число фиксированных значений. В типовом случае – два.
Система автоматического регулирования называется релейной, если она содержит хотя бы один релейный элемент. В релейном элементе при плавном изменении входного сигнала выходной сигнал изменяется скачкообразно. Моменты времени, в которые происходит изменение выходного сигнала, заранее неизвестны; они не задаются извне, а определяются внутренними свойствами самой автоматической системы.
Релейные системы обладают рядом преимуществ, благодаря которым они широко используются в системах автоматического управления:
- простота устройства и надежность в работе;
- высокое быстродействие;
- стабильность выходного параметра при широком диапазоне изменения входного сигнала;
- возможность реализовать сложный логический алгоритм работы.
Дата: 2019-04-23, просмотров: 1035.