Навантаженням, що діють на кран, поділяються на:
1. корисні сили технологічного опору
2. вагові навантаження крана та його елементів
3. сили шкідливих опорів (тертя, динамічні, вплив нахилів)
4. навантаження від зовнішніх впливів (вітер, сніг, крига, землетрус)
Навантаження поділяються на: нормативні, випадкові (пульсація). Корисними силами технологічного опору вважають:
1. вага вантажу
2. вага захоплюючих пристроїв
Вагові параметри кранів (Иванченко ст. 127)
Вітрові навантаження
Їх вплив враховують як суму статистичних і динамічних сил. Статистична сила вітру F в = рА
р – розподілене вітрове навантаження на даній висоті;
А – площа металоконструкції.
Площа конструкції
А = КсуцАг
Аг – площа ферми
Ксуц= 0,2…0,6 – прокат (кутники), 0,2…0,4 – труби.
Розподілена сила вітру
Р = qp СК
q=ρ  – динамічний тиск на висоті 10 м.
– динамічний тиск на висоті 10 м.
ρ=1,23 кг/м3 – густина повітря
υ – швидкість вітру м/с
С – аеродинамічний коефіцієнт, С = 0,8…1,2 – труби, С = 1,2 – коробчасті конструкції, С = (1,5…1,6) – для балок з поясами.
n – коефіцієнт навантаження, n = (1…0,1)
К – коефіцієнт, що враховує зміну динамічного тиску вітру на висорі.
Розрізняють вітрове навантаження робочого стану, і неробочого стану 125 Па.
Для неробочого стану q = 250 м 450 Па. Для гірських і морських q = 750 м 1000 Па.
Снігове навантаження – добуток тиску від снігу (500–2000 Па) на проекції горизонтальної проекції.
Сейсмічні навантаження.
Динамічні навантаження виникають в кранах в період пуску і розрізняють динамічні навантаження від сил інерції руху мас і навантаження коливального характеру внаслідок пружності елементів машин.
Під дією зовнішніх навантажень (технологічного опору) пружні елементми деформуються, а зосереджені маси машини крім основного руху
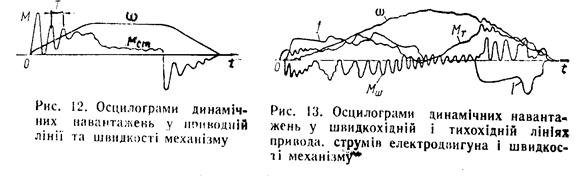
здійснюють малі коливання. Моменти і сили в цей період значно перевищують статичні та інерційні навантаження. Динамічні навантаження мають вирішальне значення при розрахунку на міцність в деяких машинах до 90% випадків до руйнування деталей, пов’язаних з втомленістю. Визначення динамічних навантажень складається з таких етапів:
1. визначення мас і жорсткості валків;
2. визначення навантажень та характеру їх дій;
3. складання диференціальних рівнянь руху маси системи;
4. визначення частот коливань прухних швидкостей в елементах механізмів
Приводи машин
Розділ №12
Привод складається: з двигуна (електро, пневмо, гідродвигун ДВЗ), механічних передач (для перетворення швидкості моментів шляху, і напрямку руху) та обладнання для керування.
Електродвигуни.
В механізмах підйомних машин використовують двигуни з різними характеристиками:
1) з жорсткими прямолінійними двигуни постійного струму з незалежним і паралельним збудженням
2) асинхронні двигуни
3) м’якими криволінійними характеристиками – двигуни постійного струму з змінним
4) м’якими прямолінійними – штучні характеристики двигунів з додатковим ротором в електричному полі ротора.
5) м’якими – двигуни постійного струму з послідовним збудженням.
Двигуни обирають: по виду струму, напрузі, потужності, пусковим та гальмівним характеристикам, виду механічної техніки, конструктивному виконанню.
1. двигуни асинхронні з короткозамкненим ротором (НТК, МТКН, NTKF) – прості невелика маса і габарити, малий пусковий момент
2. асинхронні двигуни з контактними кільцями та з фазовим ротором (МТ, МТВ, МТF, МТН). Забезпечують плавність пуску і гальмування, допускають регулювання швидкості – можливість зменшення пускового струму, при одночасному збільшенні момента.
3. двигуни постійного струму (Д, МП, ДП). В механізмах підйому використовують двигуни послідовного і змінного струму.
Регулювання робочих швидкостей може бути в межах для ниткових кранів 1:3, а для монтажних 1:15.
Способи регулювання: 1) грубе регулювання (нехтування гальмом, перемикання полюсів двох двигунів з планетарною передачею); 2) багатоступеневе регулювання зміни ступеня ротора, використання КЗП; 3) глибоке регулювання: за допомогою генератора-двигуна; тиристорний привод у гідросхемах дроселями в механічних приводах варіаторами.
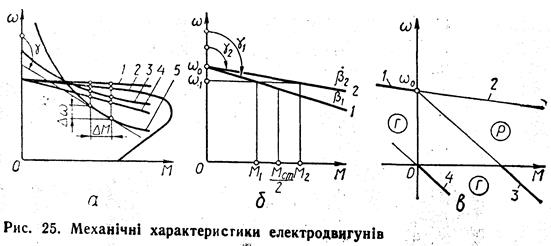
Розрізняють три гальмівні режими (рис. 25 в):
1. генераторний – 1
2. противмикання – 3
3. динамічне гальмування – 4
Двигуни виконуються на лапах, фланцеві вмонтовані.
Гальмівні механізми
Гальмівні механізми діляться на: зупинки і гальма. Вони бувають храпові і фракційні.
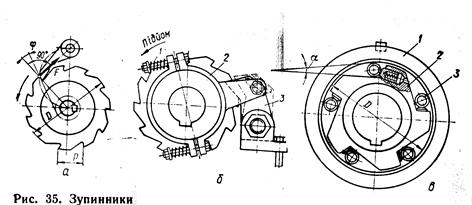
Храповий зупинник складається. Він встановлюється на швидколідному валу (рис. 35в).
1) нерухомий корпус; 2) обертова втулка; 3) ролик.
Розрахунок (Иванченко ст. 82)
Гальма – вмикання сил тертя і перехід від кінетичної енергії в теплову.
Класифікація гальм:
1. за напрямом дії сил натискання на гальмовий елемент. Радіальні і осьові.
2. за конструкцією робочого елементу: а) калиткові; б) стрічкові; в) дискові, г) конусні.
3. за джерелом замикаючої сили: а) ручні; б) пружинні; в) вантажні; г) гідравлічні.
4. за принципом дії: а) автоматичні; б) керовані.
5. за призначенням: а) штопорні; б) обмежуючі швидкість.
6. за характером дії приводного зусилля: а) закритого типу (постійно замкнуті); б) відкритого типу; в) комбіновані.
Автоматичні гальма можуть бути лише закритого типу, а керовані – відкритого або комбінованого. Для розмикання гальм застосовують довго- і короткоходові електромагніти та прилади.
В якості фракційних матеріалів використовують азбестові матеріали до 70% з різними наповнювачами і зв’язуючими, а також порошкових матеріалів.
Середня потужність тертя гальм
Мг = 
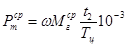
Колодкові гальма
Вони бувають: одноколодкові, двоколодкові, які управляються електромагнітними або електрогідравлічними пристроями.
1) шків; 2) гальмові важелі; 3) колодка з фрикційними накладками; 4) допоміжна пружина; 5) скоба; 6) робоча пружина; 7) шток; 8) якір; 9) електромагніт; 10) регулювальний гвинт.
Гальмівні електромагніти бувають: змінного та постійного струму, короткоходові 2–4 мм і шпунжерні 20…80 мм.
Крутний момент від ваги G вантажу зведений до валу двигуна
Мкр = 
D – діаметр барабана;
Un – кратність поліспоста;
Up – перед. число редуктора;
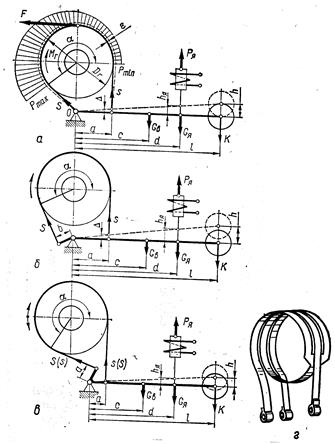
Гальмівний момент
Мг = КМкр
К – коефіцієнт запасу гальмування. К = 1,5…2,5
Діаметр гальмівного шкіфа
Dr = 1,5 10-2 
f – коефіцієнт тертя стрічки шкіф f = 0,35
P – тиск колодки шкіфу Р = 0,2…0,4мПа
Мг = КМкр;  ;
;
F = 
Розділ №13
Стрічкові гальма
Застосовуються в механізмах де потрібен великий гальмівний момент при невеликих габаритах.
Сталева стрічка з накладками охоплює диск і в результаті притискання відбувається гальмування. Гальма керуються електромагнітними гідро – або пневмоприводами або ножними педалями. Замикання гальм вантажне або пружинне.
Залежно від закріплення кінців стрічки гальма поділяються:
а) прості;
б) диференціальні;
в) двохсторонньої дії.
а) просте стрічкове гальмо односторонньої дії застосовується для нереверсивних механізмів. Колове зусилля
F = 
Натяги стрічки
S = F  ; S =
; S = 
S = S efa
Ширина стрічки обирається із умов допустимого тиску
В = 
[p] = 0,6…0,8мПа – сторонні
[p] = 0,3…0,4мПа – для спускних
Тиск між стрічкою і шкивом
р = 
Зусилля гальмування
К = 
 = 10…15
= 10…15
б) диференціальне гальмо односторонньої дії
Сила гальмування
К = 
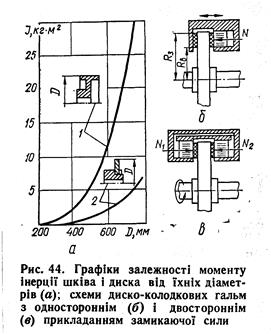
Гальма з осьовим замиканням
Будова дискового гальма (рис. 43.а)
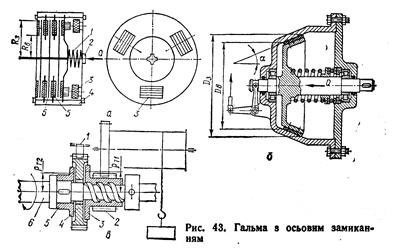
1) пружина; 2) болт; 3) електромагніти; 4) кожух; 5) нерухомі диски; 6) обертові; 7) якір.
Використовуються в механізмах невеликої потужності разом з зупинником.
Диско-колодкові гальма
За інструктивним виконанням бувають: із одним і двостороннім прикладанням зусиль. Можуть використовуватись як і шопорні керовані і комбіновані.
Будова гальм з автоматичним регулюванням зазору
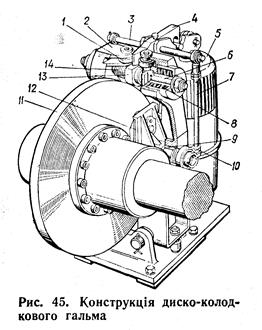
Диск 11 затискається колодками 12, через важелі 2 під дією пружини 8, які стоять на тязі 6. Посередині тяги закріплений важіль з’єднаний із штоком електрогіднопривода 5. При вмиканні привода важіль 13 повертається і діючи клином 4 на ролики 1 і допоміжну пружину 14 розводить важілі 2 і колодки. Пристрій 10 автоматично регулює зазор у важелі колодки вгвинчено порожнисті втулки 9 куди входить циліндричний хвостовик колодок12 на зовнішніх кінцях втулок у переді точено храповик шарнірно з’єднаних тягами з валами 3. При кожному числі гальмування здійснюють коливальний рух повертаючи втулки, змикаючи зазор.
Механізми підйому
Використовуються для вертикального підйому вантажу. Вони поділяються на два типи: 1) з жорсткою кінематичною схемою (канатні, рейкові, гвинтові) 2) з фрикційним приводом.
По кількості двигунів
1. електричні одно – або двомоторні
2. гідравлічні
3. пневматичні
– За типом передач:
1. циліндричним
2. планетарним
3. зубчасті хвильові редуктори
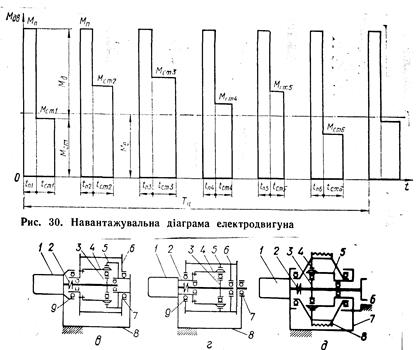
на (рис. 48.а) 1) редуктор; 2) півмуфта з гальмівним шківом; 3) муфта; 4) мотор; 5) гакова підвіска (шківи); 6) поліспасти; 7) барабан.
(48.г) – привод з планетарним редуктором, вали двигунів 1–5 співвісні і обертають центральні колеса Z 1 i Z2.
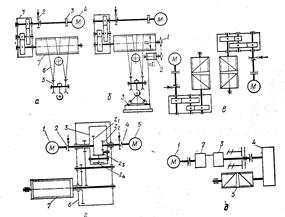 Рис.-48
Рис.-48
Сонячні шестерні Z 1 i Z2 через проміжну шестерню Z3 надають рух сателіту Z4, закріпленому у водилі 3, яке зв’язано з приводною шестернею двохступінчастого редуктора 6, під’єднаного до барабана 7. Вал двигуна 1 проходить у порожнистому валу, який з’єднує водило з шестернею редуктора двигуна з гальмом з’єднуються муфтами 2…4. Можливо отримати 4 швидкості.
1. максимально обидва двигуни обертаються в одному напрямку
2. працює двигун 1
3. працює двигун 5
4. мінімально двигуни 1 і 5 працюють у різних напрямках
Розділ №14
Поліспасти
Поліспаст – система рухомих і нерухомих у просторі блоків, що огинаються канатом або ланцюгом, призначена для виграшу в силі (силові або редукторні поліспасти), або швидкості (швидкісні або мультиплікаторні). В підйомних механізмах застосовують силові поліспасти.
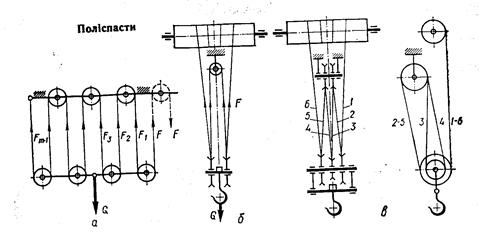
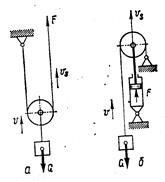 Рис.-49
Рис.-49
Кратність поліспаста
Для поліспаста (а)
F =  ; υ s = 2υ e
; υ s = 2υ e
Для поліспаста (б)
F =  ; υ s =
; υ s = 
η = 0,95 для блоків, які стоять по підшипниках ковзання
η = 0,98 для блоків по підшипниках кочення
Поліспасти поділяють на одинарні і здвоєні в залежності від числа канатів, які монтуються на барабан.
Зусилля в канаті F = 
Де m – число віток поліспаста на яких вісить вантаж.
Для одинарного m є і кратністю і передаточним числом.
Натяг у нитці каната, з урахуванням к.к.д. дорівнює
F = G = 
Загальний ККД поліспасту
ηпл =  ;
;
ηп = 
Кратність здвоєного поліспаста
ηп = 
Дата: 2019-05-28, просмотров: 327.