Рассчитаем суммарную погрешность  для ЧЭ ГИВУС 1, 3, 5, 6 в виде:
для ЧЭ ГИВУС 1, 3, 5, 6 в виде:
 ; (4.16)
; (4.16)
где  - погрешность цены импульса;
- погрешность цены импульса;
 - погрешность случайного ухода;
- погрешность случайного ухода;
 - погрешность, обусловленная ошибками установки.
- погрешность, обусловленная ошибками установки.
Пусть скорость направлена по оси 6-го ЧЭ.
Матрица установки С (6х3) имеет вид:
 ; (4.17)
; (4.17)
Элементы матрицы С определяются выражениями:
 (4.18)
(4.18)
После тригонометрических преобразований и предположения, что  , выражения (4.18) будут иметь вид, соответственно:
, выражения (4.18) будут иметь вид, соответственно:
 (4.19)
(4.19)
Определим составляющие выражения (4.16).
1. Вычислим  - погрешность цены импульса.
- погрешность цены импульса.
Пусть с ГИВУС поступают выходные импульсы Ni (i = 1, 3, 5, 6):
 (4.20)
(4.20)
где  – приращение угла поворота объекта вокруг оси чувствительности i-го
– приращение угла поворота объекта вокруг оси чувствительности i-го
ЧЭ ГИВУС за такт;
 – реальная цена импульсов i-го ЧЭ ГИВУС;
– реальная цена импульсов i-го ЧЭ ГИВУС;
[…] – операция выделения целой части.
В алгоритме обработки информации ГИВУС приращение угла поворота объекта за такт вычисляется по формуле [7]:
 (4.21)
(4.21)
где  - алгоритмическая цена импульсов i-го ЧЭ ГИВУС, взятая из ПЗУ или ПЗ.
- алгоритмическая цена импульсов i-го ЧЭ ГИВУС, взятая из ПЗУ или ПЗ.
Подставляя величину в виде [7, 16, 21, 22]:
где  - ошибка знания реальной цены импульсов ГИВУС, и полагая в (4.3.5)
- ошибка знания реальной цены импульсов ГИВУС, и полагая в (4.3.5)  в данный момент времени, из (4.18) получим [16]:
в данный момент времени, из (4.18) получим [16]:
где  - ошибка в вычислении приращения угла
- ошибка в вычислении приращения угла  в алгоритме обработки информации ГИВУС, определяемая по формуле [22]:
в алгоритме обработки информации ГИВУС, определяемая по формуле [22]:
 (4.22)
(4.22)
Контрольную разность можно представить в виде [7]:
 (4.23)
(4.23)
Т.к. ошибки случайны и независимы между собой, получим [21]:
 (4.24)
(4.24)
где  - ошибка в вычислении приращения угла поворота в ПСК ГИВУС, которая вычисляется по формуле [7, 16, 21]:
- ошибка в вычислении приращения угла поворота в ПСК ГИВУС, которая вычисляется по формуле [7, 16, 21]:
 (4.25)
(4.25)
где В(j, i) – матрица управления, которая имеет вид:
 ,
,
 ,
,
 .
.
После подстановки в (4.25) численных значений и некоторых предположений, мы получим значение погрешности от цены импульса  .
.
2. Вычислим - погрешность случайного ухода.
В данном случае имеем [7, 21, 22]:
 (4.26)
(4.26)
тогда после подстановки в (4.24) (4.25) и с учетом (4.26) мы получим значение погрешности от случайного ухода .
3. Приведем методику вычисления  - погрешности, обусловленной ошибками установки
- погрешности, обусловленной ошибками установки
Данная погрешность вычисляется по формуле [7 ,16]:

4.4 Алгоритм стабилизации
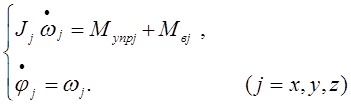
В правых частях динамических уравнений (1.1) стоят проекции вектора главного момента всех внешних сил М, действующих на корпус космического аппарата :  .
.
Характерной особенностью момента управления  является активность, он появляется в результате включения вспомогательных органов (в частности реактивных двигателей стабилизации), и исчезает при их отключении. Момент , следует логике теории автоматического управления, и обеспечивает заданное угловое движение корпуса космического аппарата [1, 3].
является активность, он появляется в результате включения вспомогательных органов (в частности реактивных двигателей стабилизации), и исчезает при их отключении. Момент , следует логике теории автоматического управления, и обеспечивает заданное угловое движение корпуса космического аппарата [1, 3].
Источником внешнего возмущающего момента  , является взаимодействие с внешней [1, 4, 6, 10, 12] средой, приводящее к появлению действующих на корпус внешних сил – гравитационного, аэродинамического, светового, магнитного и др. Будем рассматривать гравитационный и аэродинамический моменты. Другие моменты не будем рассматривать в силу их малости.
, является взаимодействие с внешней [1, 4, 6, 10, 12] средой, приводящее к появлению действующих на корпус внешних сил – гравитационного, аэродинамического, светового, магнитного и др. Будем рассматривать гравитационный и аэродинамический моменты. Другие моменты не будем рассматривать в силу их малости.
Момент имеет две составляющих –  (создаваемую реактивными двигателями), и
(создаваемую реактивными двигателями), и  (создаваемым моментным магнитоприводом и др. Будем рассматривать только ).
(создаваемым моментным магнитоприводом и др. Будем рассматривать только ).
Важным свойством динамической системы ориентации является: если осями ориентации являются поступательно движущиеся оси, то при соответствующем законе управления вместо сложных пространственных поворотов космического аппарата можно изучать три независимых плоских угловых движения, что мы и сделаем в системе, т.е.:
 (4.27)
(4.27)
получено три независимых уравнения.
Пусть двигатели работают в импульсном режиме [1, 4, 6, 11, 12]. Зона нечувствительности определяется условием:
 . (4.28)
. (4.28)
Для изучения нужного динамического процесса, коэффициенты k в законе управления (Рис. 4.2):
 ; (4.29)
; (4.29)
должны быть положительны. Сигнал управления формируется путем сложения сигналов датчика угла и датчика угловых скоростей. Включение двигателей происходит при  . Диаграмма зависимости управляющего момента
. Диаграмма зависимости управляющего момента  от сигнала
от сигнала  имеет вид ( рис 4.3 ) [1 ,3 , 25].
имеет вид ( рис 4.3 ) [1 ,3 , 25].
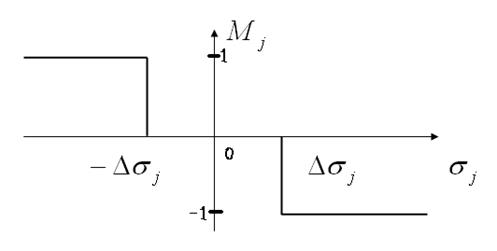
Рис. 4.2 - Закон управления
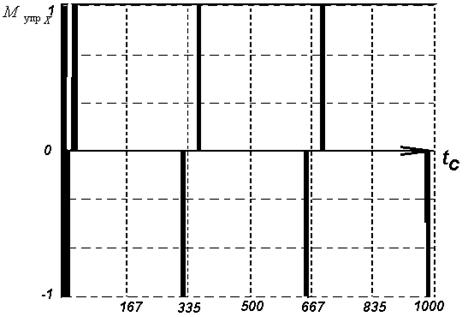
Рис. 4.3 - Изменение управляющего момента со временем в канале X:
Фазовая диаграмма процесса установления ориентации имеет вид (рис 4.2). Заштрихованная область – это комбинация значений  , при которых действует управляющий момент [6]. Линии
, при которых действует управляющий момент [6]. Линии  являются линиями переключения, т.е. при пересечении этих линий изображающей точкой происходит включение (или выключение) исполнительных органов системы ориентации. Указанные линии походят через точки
являются линиями переключения, т.е. при пересечении этих линий изображающей точкой происходит включение (или выключение) исполнительных органов системы ориентации. Указанные линии походят через точки  на оси абсцисс, а их наклон зависит от коэффициента k [1, 3, 25]:
на оси абсцисс, а их наклон зависит от коэффициента k [1, 3, 25]:
 ; (4.30)
; (4.30)
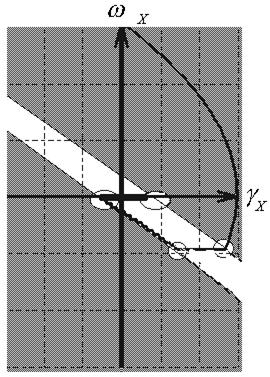
Рис. 4.4 - Фазовый портрет
Также вводятся дополнительные зоны нечувствительности:  ,
,  - нижняя и верхняя линии переключения, располагающиеся параллельно оси абсцисс. Они предназначены для «гашения» больших начальных угловых скоростей [25]. При пересечении этих линий изображающей точкой происходит включение (или выключение) исполнительных органов системы ориентации. Соответственно дополнительная зона нечувствительности находится между
- нижняя и верхняя линии переключения, располагающиеся параллельно оси абсцисс. Они предназначены для «гашения» больших начальных угловых скоростей [25]. При пересечении этих линий изображающей точкой происходит включение (или выключение) исполнительных органов системы ориентации. Соответственно дополнительная зона нечувствительности находится между  , и
, и  . Фазовый портрет при больших начальных угловых скоростях приведен на (Рис. 4.5)
. Фазовый портрет при больших начальных угловых скоростях приведен на (Рис. 4.5)
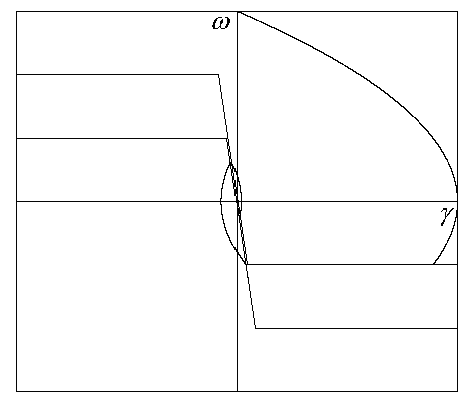
Рис. 4.5 - Фазовый портрет с большими начальными угловыми скоростями
Также вводится гистерезис,  - предназначенный для гашения шумов при «скольжении» фазовой диаграммы по линии переключения с наклоном -1/K [3].
- предназначенный для гашения шумов при «скольжении» фазовой диаграммы по линии переключения с наклоном -1/K [3].
Рассмотрим КА как упругое тело [1.3.6.7,9,10,11.12]. Уравнения осцилляторов для упругой модели имеет вид [5]:
 (4.31)
(4.31)
где  - коэффициент демпфирования для каждой отдельно взятой гармоники.
- коэффициент демпфирования для каждой отдельно взятой гармоники.
 - квадрат собственной частоты не демпфированных колебаний для каждой гармоники.
- квадрат собственной частоты не демпфированных колебаний для каждой гармоники.  - управляющий момент с учетом возможного отказа. i = 1,2,3,4. Коэффициенты
- управляющий момент с учетом возможного отказа. i = 1,2,3,4. Коэффициенты 

 мы берем из таблицы, приведенной в Приложении А.
мы берем из таблицы, приведенной в Приложении А.
При нулевой правой части, мы получаем свободные колебания, зависящие от начальных отклонений, угловых скоростей и др. При ненулевой правой части мы получаем вынужденные колебания, которые накладываются на свободные колебания. Они являются затухающими со временем, в силу коэффициента демпфирования. Прототипом для данной упругой модели послужил маятник на пружинке. Рассматриваемая система является линейной.
Находим, также как для абсолютно твердого тела, угловые скорости, угловые ускорения, с учетом возможных отказов [25, 26].
Введем в имитационную модель космического аппарата наряду с двигателями большой тяги – двигатели малой тяги. Будем рассматривать двигатели дросселированной тяги, т.е. реактивные двигатели могут работать как с большой тягой, так и с малой. Введем дополнительную зону нечувствительности для двигателей большой тяги. Для более эффективного гашения шумов введем паузу по времени при выходе из зон нечувствительности. Для наглядности введем паузу Tp = 3 сек. Тогда, фазовый портрет для упругой модели, с учетом работы двигателей малой тяги и действующих на космический аппарат аэродинамического и гравитационного моментов, имеет вид (рис 4.6). Так как задана достаточно большая пауза, то процесс может, получился неустойчивым. Таким образом, очень важным фактором является правильный выбор паузы [25].
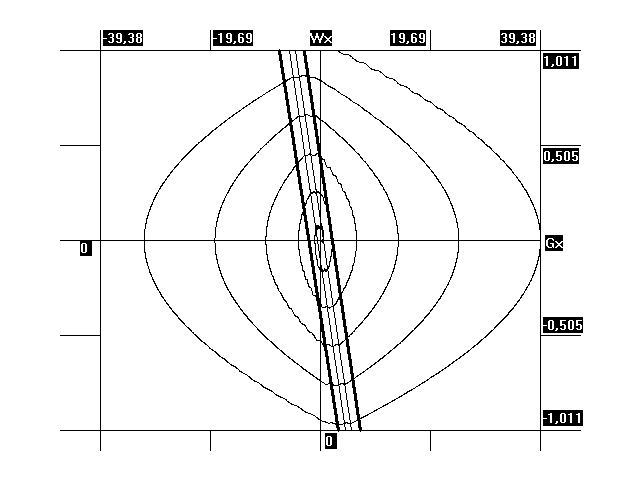
Рис. 4.6 - Фазовый портрет для большой паузы
Разработанный алгоритм позволяет моделировать сложные физические процессы с учетом внешних факторов действующих во время полета космического аппарата [1, 3, 25].
4.5 Решение задачи идентификации отказов
Алгоритм обработки данных в бесплатформенной инерциальной навигационной системе строится с использованием субоптимального дискретного фильтра Калмана [7, 16, 22, 25, 27].
Для малых угловых отклонений осей ССК от БСК и при условии Ix » Iy » Iz уравнения (1.1) и (1.2) запишем в виде [25]:
Тогда для построения системы оценки вектора состояния (j j, w j, m в j) примем следующую модель объекта наблюдения [16, 22, 27]:
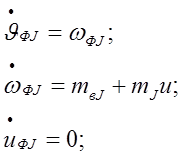 (4.32)
(4.32)
где mj =МДС j / Jj - эффективность управляющего момента;
МДС j - управляющий момент ДС;
m в j =Мв j / Jj - эффективность возмущающего момента;
uj - сигнал управления ДС;
j = x, y, z .
Запишем систему уравнений (4.32) в стандартной векторно-матричной форме, дополнив ее уравнением измерений [7]:
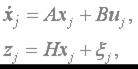
где xj = (x1j, x2j, x3j)T=(j j, w j, m в j)T - вектор состояния;
zj - вектор измерений;
x j - шум измерений;
 ,
,
j=x, y, z.
Используя критерий Калмана, несложно показать, что такая система является полностью наблюдаема [7, 16, 22, 25, 26, 27]:
rank[HT ATHT (AT)2HT]=n=3, где n - порядок системы.
Реализация в бортовом вычислителе дискретного фильтра Калмана сводится к оценке вектора состояния по следующим соотношениям [25, 27]:

 (4.33)
(4.33)

где:  - оценка вектора состояния;
- оценка вектора состояния;
 - переходная матрица для вектора состояния;
- переходная матрица для вектора состояния;
 - матрица измерений;
- матрица измерений;
 - ковариационная матрица ошибок фильтрации;
- ковариационная матрица ошибок фильтрации;
 - ковариационная матрица ошибок прогноза;
- ковариационная матрица ошибок прогноза;
 - матричный коэффициент усиления;
- матричный коэффициент усиления;
 - ковариационная матрица шумов измерения;
- ковариационная матрица шумов измерения;
j=x, y, z.
Работа алгоритма основана на анализе величины оцениваемого в фильтре Калмана возмущающего момента [25]. Если математическое ожидание оценки возмущающего момента, вычисленного на некоторой временной базе, где управление равно нулю, превосходит допустимый порог, то принимается решение об отказе ДС и переходе на резерв (рис. 4.7) [25].
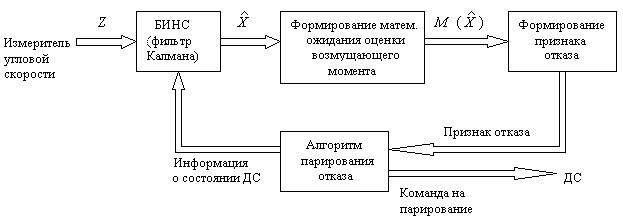
Рис. 4.7 - Обобщенная структурная схема алгоритма
4.6 Метод статистически гипотез
Статистическая гипотеза - есть некоторое предположение относительно свойств [27, 28] генеральной совокупности, из которой извлекается выборка. Критерий статистической гипотезы – это правила позволяющие принять или отвергнуть данную гипотезу на основании выборки. При построении такого правила используются определенные функции результатов наблюдений  , называемые статическими для проверки гипотез. Все возможные значения подобных статистик делятся на две части: если нет – гипотеза принимается, как не противоречащая результатам наблюдения, если да – гипотеза отвергается [27, 28, 29]. При этом всегда возможно совершить ошибку; различные типы возможных ошибок заданы в таблице 4.1:
, называемые статическими для проверки гипотез. Все возможные значения подобных статистик делятся на две части: если нет – гипотеза принимается, как не противоречащая результатам наблюдения, если да – гипотеза отвергается [27, 28, 29]. При этом всегда возможно совершить ошибку; различные типы возможных ошибок заданы в таблице 4.1:
Таблица 4.1
| Гипотеза | Объективно верна | Объективно неверна |
| Принимается | Правильное решение | Ошибка ll рода |
| Отвергается | Ошибка l рода | Правильное решение |
Вероятность совершить ошибку l рода [8] называется уровнем значимости критерия и обозначается q. Обычно уровень значимости выбирают, равным 0.01; 0.1; 0.05 (последнее значение - наиболее часто) [28].
Критерии значимости – это критерии, с помощью которых проверяют гипотезы об абсолютных значениях параметров или о соотношениях между ними для генеральных совокупностей (с точностью до параметров) функцией распределения вероятностей [29].
Построение гистограммы выборки. Гистограмма  является эмпирическим аналогом функции плотности распределения f(x). Обычно ее строят следующим образом:
является эмпирическим аналогом функции плотности распределения f(x). Обычно ее строят следующим образом:
1. Находят предварительное количество квантов (интервалов), на которое должна быть разбита ось Ox. Это количество K определяют с помощью оценочной формулы:
K=1+3.2lgN ; (4.34)
Где найденное значение округляют до ближайшего целого числа.
2. Определяют длину интервала [29]:
 ; (4.35)
; (4.35)
Величину  можно округлить для удобства вычислений.
можно округлить для удобства вычислений.
3. Середину области изменения выборки (центр распределения)  принимают за центр некоторого интервала, после чего легко находят границы и окончательное количество указанных интервалов так, чтобы в совокупности они перекрывали всю область от
принимают за центр некоторого интервала, после чего легко находят границы и окончательное количество указанных интервалов так, чтобы в совокупности они перекрывали всю область от  до
до  .
.
4. Подсчитывают количество наблюдений  попавшее в каждый квант; равно числу членов вариационного ряда, для которого справедливо неравенство [27-29]:
попавшее в каждый квант; равно числу членов вариационного ряда, для которого справедливо неравенство [27-29]:
 ; (4.36)
; (4.36)
здесь  и
и  - границы m-ого интервала. Отметим, что при использовании формулы (4.36) значения
- границы m-ого интервала. Отметим, что при использовании формулы (4.36) значения  попавшее на границу между (m-1)-м и m-ом интервалами, относят к m-ому интервалу.
попавшее на границу между (m-1)-м и m-ом интервалами, относят к m-ому интервалу.
5. Подсчитывают относительное количество (относительную частоту) наблюдений /N , попавших в данный квант.
Строят гистограмму [7, 8, 9], представляющую собой ступенчатую кривую, значения которой на m-ом интервале  , (m=1,2,…,K)
, (m=1,2,…,K)
6. постоянно и равно /N, или с учетом условия  равно ( /N)
равно ( /N)  .
.
Критерии согласия. Критерием согласия [8] называется критерий гипотезы о том, что генеральная совокупность имеет распределение предполагаемого типа (например, нормально распределение). Среди различных критериев согласия наиболее употребителен универсальный критерий согласия  (Пирсона).
(Пирсона).
Проверку гипотезы о виде функции распределения с помощью этого критерия производят следующим образом [27-29]:
1. a) По выборке строят гистограмму. Если в каком-либо f-ом интервале число наблюдений  окажется меньше пяти, то его объединяют с соседним интервалом (или интервалами) так, чтобы число наблюдений в таком объединенном интервале оказалось большим или равным пяти. Пусть
окажется меньше пяти, то его объединяют с соседним интервалом (или интервалами) так, чтобы число наблюдений в таком объединенном интервале оказалось большим или равным пяти. Пусть  – окончательное число интервала группирования, тогда очевидно, что
– окончательное число интервала группирования, тогда очевидно, что
 ; (4.37)
; (4.37)
б) Задаются видом гипотетической функции распределения и для каждого из r (r=1,2,…) параметров этого распределения находят оценки, причем эти оценки можно определять как по исходным, так и по сгруппированным данным [27].
в) Определяют теоретическую вероятность  попадания в каждый из интервалов случайной величины с заданным распределением, параметры которого или известны или оценены в параграфе б) [28].
попадания в каждый из интервалов случайной величины с заданным распределением, параметры которого или известны или оценены в параграфе б) [28].
г) вычисляют число g:
 ; (4.38)
; (4.38)
2. Известно, что для данного критерия согласия случайная величина g при Больших N имеет распределение с - r - 1 степенями свободы, где r - число определенных неизвестных заранее параметров гипотетического распределения, а уменьшения числа степеней свободы еще на единицу объясняется наличием линейного соотношения (4.35) между эмпирическими величинами и N , входящими в расчетную формулу (4.36). Задавшись уравнением значимости q, по таблице  -распределений находят критическое значение
-распределений находят критическое значение  , причем критическая область определяется неравенством g>
, причем критическая область определяется неравенством g>  =
=  = - r – 1;
= - r – 1;  .
.
3.Сравнивая значения g и и выносят решение о принятии (g <= ) или отклонение (g > ) рассматриваемой гипотезы о виде функции распределения [27-29].
4.7 Алгоритм контроля отказов ДС при неполной тяге
Алгоритм неполной тяги - представляет собой алгоритм позволяющий моделировать остаточную тягу при отказе одного из реактивных двигателей стабилизации, для отказа типа «не отключение». Остаточная тяга может меняться в пределах: 0%-100%. При 0% тяги, отказ типа «не отключение» переходит в отказ типа «не включение». Пусть P – тяга, а k – коэффициент остаточной тяги, задаваемый в процентах. Тогда в общем случае, при отказе одного из двигателей, тяга имеет вид (4.39) [25, 26]:
 (4.39)
(4.39)
Блок-схема алгоритма имеет вид (Рис. 4.8):
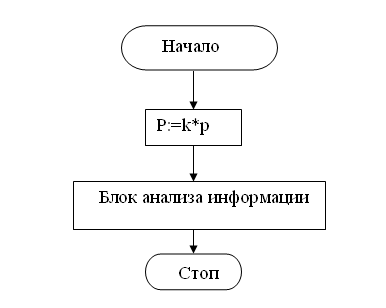
Рис. 4.8 - Блок схема алгоритма неполной тяги
В общем случае коэффициент K носит стохастический характер. Блок анализа информации формирует таблицу включений, для алгоритма стабилизации [25].
При функционировании алгоритма контроля мы находим максимальные опасной продолжительности на каждой базе, после чего варьируем начальные условия в пределах 20%. Формируем выборку. Таким же образом мы варьируем параметров для случаев отказа работы двигателей типа «не отключение» и типа «не включение». Начальные варьируемые условия приведены в таблице 4.2.:
Таблица 4.2
| Wx | Wy | Wz | Gx | Gy | Gz | Ix | Iy | Iz | |
| N | 1 | -0.5 | 0.5 | 5 | 10 | 1 | 500 | 1500 | 2000 |
| N+ | 1.2 | -0.6 | 0.6 | 6 | 12 | 1.2 | 600 | 1800 | 2400 |
| N- | 0.8 | -0.4 | 0.4 | 4 | 8 | 0.8 | 400 | 1200 | 1600 |
где N – это исходные начальные условия, N- параметр варьируемый в сторону уменьшения, N+ параметр варьируемый в сторону увеличения [25].
Упрощенная выборка имеет вид:
Таблица 4.3
|
| N | N- | N+ | |
| Нормальный режим | 264 | 157 | 999 | |
| Отказ работы двигателя типа «не отключение» | 1 | 1000 | 1000 | 999 |
| 3 | 1000 | 1000 | 1000 | |
| 6 | 1000 | 1000 | 999 | |
| 8 | 999 | 1000 | 1000 | |
| Отказ работы двигателя типа «не включение» | 1 | 1000 | 157 | 1000 |
| 3 | 999 | 286 | 1000 | |
| 6 | 265 | 158 | 999 | |
| 8 | 264 | 157 | 1000 | |
Для наглядности построим гистограмму, и изобразим ее в виде функции – закона распределения, [8, 9, 25-29] для облегчения нахождения критической точки в методе статистических гипотез. Находим математические ожидания. Графики зависимостей приведены на (Рис. 4.9) [27-29]:
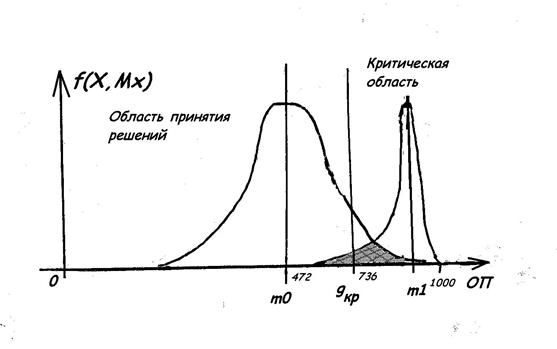
Рис. 4.9 – Аппроксимированная гистограмма
Здесь m0 и m1 - математические ожидания. При рассмотрении левостороннего критерия, получили критическую точку Gкр = 736. Т.о.  =Gкр, если, следуя алгоритму контроля, ОП <
=Gкр, если, следуя алгоритму контроля, ОП <  , то есть основания утверждать, что отказа в работе двигателя нет, в противном случае, при попадании значения ОП в критическую область, т.е. ОП >= , ПО присваивается значение единицы, и есть основания утверждать, что отказ в работе двигателя есть [25].
, то есть основания утверждать, что отказа в работе двигателя нет, в противном случае, при попадании значения ОП в критическую область, т.е. ОП >= , ПО присваивается значение единицы, и есть основания утверждать, что отказ в работе двигателя есть [25].
5 РЕЗУЛЬТАТЫ ЧИСЛЕННОГО МОДЕЛИРОВАНИЯ
Рассмотрим космический аппарат как упругое тело, описываемое уравнениями (3.1), (3.2), (3.4), (3..5). Рассмотрим режим построения базовой ориентации с учетом внешних возмущающих воздействий – аэродинамического и гравитационного, а также с учетом дрейфа нуля ГИВУС.
Для наглядности функционирования алгоритма стабилизации ДС КА, где в качестве гистерезиса используется пауза по времени, проведем моделирование СУО, с начальными условиями, приведенными в табл. 5.1.
Таблица 5.1
| Вариант № | Угловые скорости | Угловые ускорения | Моменты инерции |
| 1 | Wx = 0.5 c-1 Wy = 0 c-1 Wz = 0 c-1 | Gx = 0 c-2 Gy = 0 c-2 Gz = 0 c-2 | Ix = 500 Нмс2 Iy = 1500 Нмс2 Iz = 2500 Нмс2 |
| 2 | Wx = 1 c-1 Wy = 0 c-1 Wz = 0 c-1 | Gx = 0 c-2 Gy = 0 c-2 Gz = 0 c-2 | Ix = 500 Нмс2 Iy = 1500 Нмс2 Iz = 2500 Нмс2 |
| 3 | Wx = 3 c-1 Wy = 1 c-1 Wz = 0 c-1 | Gx = 0 c-2 Gy = 0 c-2 Gz = 0 c-2 | Ix = 500 Нмс2 Iy = 1500 Нмс2 Iz = 2500 Нмс2 |
| 4 | Wx = -4 c-1 Wy = 0 c-1 Wz = 0 c-1 | Gx = -1 c-2 Gy = 0 c-2 Gz = 0 c-2 | Ix = 500 Нмс2 Iy = 1500 Нмс2 Iz = 2500 Нмс2 |
| 5 | Wx = 0 c-1 Wy = 3 c-1 Wz = 0 c-1 | Gx = 0 c-2 Gy = 0 c-2 Gz = 0 c-2 | Ix = 500 Нмс2 Iy = 1500 Нмс2 Iz = 2500 Нмс2 |
| 6 | Wx = 0.5 c-1 Wy = 0.5 c-1 Wz = 1 c-1 | Gx = 0.001 c-2 Gy = 0.001 c-2 Gz = 0.001 c-2 | Ix = 500 Нмс2 Iy = 1500 Нмс2 Iz = 2500 Нмс2 |
Функционирование СУО с набором начальных условий варианта 2 табл. 5.1 во временной плоскости представлено на рис. 5.1, рис. 5.2, рис. 5.3.
Функционирование СУО с набором начальных условий варианта 1-6 табл. 5.1 на фазовой плоскости, представлено в приложении Б.
. 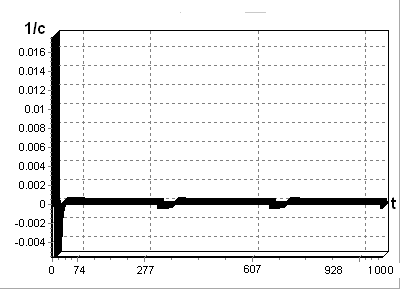
Рис. 5.1 – Зависимость угловой скорости от времени в канале X
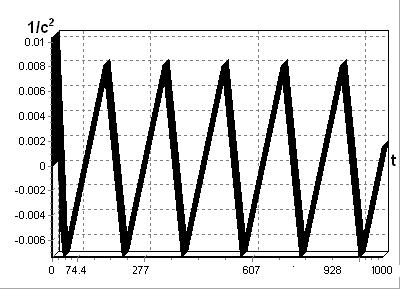
Рис. 5.2 – Зависимость углового ускорения от времени в канале X
Как показали результаты моделирования (рис. 5.1-5.3), разработанный алгоритм стабилизации при наличии внешних возмущающих воздействий показал высокую эффективность в режиме построения базовой ориентации. Как показало моделирование, наиболее эффективным методом гашения шумов управления, которые возникают в следствии «скольжения» управляющего воздействия по границе области нечувствительности, при реализации логики управления, оказалось введение паузы по времени при выходе из зоны нечувствительности для двигателей малой тяги и зоны нечувствительности двигателей большой тяги. Для более эффективного гашения шумов, а соответственно снижения расхода рабочего тела, были введены в модель упругого КА двигатели малой тяги, с дополнительной зоной нечувствительности в законе управления и дополнительной задержкой по времени. Для сравнения был рассмотрен гистерезис с фиксированной зоной нечувствительности для ДБТ и ДМТ. Эффективность применения меньше по сравнению с паузой по времени, в связи с фиксированной зоной нечувствительности для всего диапазона угловых скоростей.
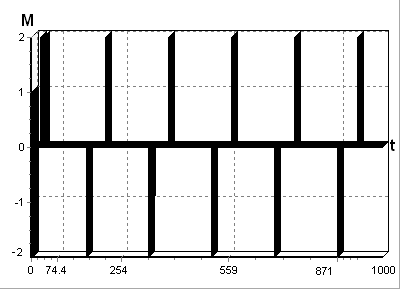
Рис. 5.3 – Зависимость управляющего момента от времени в канале X
Проведем моделирование СУО с различными наборами коэффициентов фильтра Льюинбергера. Начальные условия модели КА возьмем из 2-ого варианта табл. 5.1. Варианты коэффициентов фильтра Льюинбергера, представлены в табл. 5.2.
Результаты моделирования представлены в приложении В. Как показали результаты моделирования – минимальную погрешность оценивания показал 4-ый вариант наборов коэффициентов фильтра Льюинбергера. Как видно из результатов моделирование, наиболее длительный по времени переходной процесс показал 1-ый набор коэффициентов табл. 5.2 (~40 сек.), последующие наборы, показали тенденцию существенного снижения времени переходного процесса, так 3-ий набор коэффициентов фильтра Льюинбергера, показал (~8 сек.), вместе с тем, такая же тенденция наблюдается и с максимальной погрешностью оценивания. Так для 1-ого набора коэффициентов она составила (~0.01 1/с) , то для 4-ого набора коэффициентов максимальная погрешность оценивания составила (~0.0005 1/c). Следует отметить, что все четыре набора коэффициентов фильтра, были выбраны из области устойчивости рис. 4.2.1. 4-ый набор коэффициентов был найден методом интегральной квадратичной оценки качества, и является наиболее оптимальным, как показали результаты моделирования, для данных НУ взятых из табл. 5.1.
Таблица 5.2 - Коэффициенты фильтра Льюинбергера
| Вариант№ | Набор коэффициентов | ||
| K1 | K2 | K3 | |
| 1 | 0.9 | 0.27 | 0.027 |
| 2 | 3 | 3 | 1 |
| 3 | 6 | 12 | 8 |
| 4 | 20.516 | 149.611 | 0.042 |
.
5.1 Моделирование отказов ГИВУС
Рассмотрим модель гироскопического измерителя вектора угловой скорости, описанной в разделе 3.3 с учетом углов установки и дрейфа нуля.
Рассмотрим пять типов отказов, описанных в табл. 5.3 и проведем соответствующую диагностику отказов ГИВУС. Примем коэффициенты фильтра Льюинбергера постоянными. K1= 6, K2=12, K3= 8. Начальные условия моделируемой системы, представлены в табл. 5.4.
Таблица 5.3 - Описание отказов ГИВУС
| Тип отказа | Описание отказа |
| 1 | Отсутствие выходной информации |
| 2 | Максимальная информация постоянного знака |
| 3 | Информация постоянного знака, кратная 750 импульсам |
| 4 | Максимальная информация с релейным чередованием знака |
| 5 | Увеличение (уменьшение) цены импульса в 4 раза |
Таблица 5.4 - НУ модели КА
| Вариант | Угловые скорости | Угловые ускорения | Моменты инерции | Типы отказов ГИВУС | Время отказа |
| 1 | Wx = 0.5 c-1 Wy = 0 c-1 Wz = 0 c-1 | Gx = 0 c-2 Gy = 0 c-2 Gz = 0 c-2 | Ix = 500 Нмс2 Iy = 1500 Нмс2 Iz = 2500 Нмс2 | 2 | 700 сек |
| 2 | Wx = 1 c-1 Wy = 0 c-1 Wz = 0 c-1 | Gx = 0 c-2 Gy = 0 c-2 Gz = 0 c-2 | Ix = 500 Нмс2 Iy = 1500 Нмс2 Iz = 2500 Нмс2 | 2 | 700 сек |
| 3 | Wx = 4 c-1 Wy = 0 c-1 Wz = 0 c-1 | Gx = 0 c-2 Gy = 0 c-2 Gz = 0 c-2 | Ix = 500 Нмс2 Iy = 1500 Нмс2 Iz = 2500 Нмс2 | 2 | 700 сек |
| 4 | Wx = 4 c-1 Wy = 0 c-1 Wz = 0 c-1 | Gx = 0 c-2 Gy = 0 c-2 Gz = 0 c-2 | Ix = 500 Нмс2 Iy = 1500 Нмс2 Iz = 2500 Нмс2 | 2 | 100 сек |
| 5 | Wx = 4 c-1 Wy = 0 c-1 Wz = 0 c-1 | Gx = 0 c-2 Gy = 0 c-2 Gz = 0 c-2 | Ix = 500 Нмс2 Iy = 1500 Нмс2 Iz = 2500 Нмс2 | 2 | 400 сек |
Результаты моделирования представлены в приложении Г. Как показали результаты моделирования, для контроля отказавшего ЧЭ требуется в среднем (~3 сек.).
5.2 Моделирование отказов ДС
Рассмотрим КА с учетом отказов двигателей стабилизации. Введем в рассмотрение отказы типа «не включения», отказы типа «не отключения» и отказы двигателей с остаточной тягой.
Проведем моделирование с начальными условиями, приведенными в табл.5.5. В таблице также представлено время выявления отказа для данного набора НУ по результата проведенного моделирования.
Таблица 5.5 - НУ модели КА и время выявления отказа
| Вари-ант | Угловые скорости | Угловые ускорен-ия | Моменты инерции | Остаточ-ная тяга ДС | Время отказа | Время выявле-ния отказа |
| 1 | Wx = 0.1 c-1 Wy = 0 c-1 Wz = 0 c-1 | Gx = 0 c-2 Gy = 0 c-2 Gz = 0 c-2 | Ix = 500 Нмс2 Iy = 1500 Нмс2 Iz = 2500 Нмс2 | 100% | 700 сек | 704.3 сек |
| 2 | Wx = 0.1 c-1 Wy = 0 c-1 Wz = 0 c-1 | Gx = 0 c-2 Gy = 0 c-2 Gz = 0 c-2 | Ix = 500 Нмс2 Iy = 1500 Нмс2 Iz = 2500 Нмс2 | 50% | 700 сек | 706.8 сек |
| 3 | Wx = 0.1 c-1 Wy = 0 c-1 Wz = 0 c-1 | Gx = 0 c-2 Gy = 0 c-2 Gz = 0 c-2 | Ix = 500 Нмс2 Iy = 1500 Нмс2 Iz = 2500 Нмс2 | 15% | 700 сек | 715.2 сек |
| 4 | Wx = 1 c-1 Wy = 0 c-1 Wz = 0 c-1 | Gx = 0 c-2 Gy = 0 c-2 Gz = 0 c-2 | Ix = 500 Нмс2 Iy = 1500 Нмс2 Iz = 2500 Нмс2 | 100% | 700 сек | 702.1 сек |
| 5 | Wx = 1 c-1 Wy = 0 c-1 Wz = 0 c-1 | Gx = 0 c-2 Gy = 0 c-2 Gz = 0 c-2 | Ix = 500 Нмс2 Iy = 1500 Нмс2 Iz = 2500 Нмс2 | 50% | 700 сек | 705.3 сек |
| 6 | Wx = 1 c-1 Wy = 0 c-1 Wz = 0 c-1 | Gx = 0 c-2 Gy = 0 c-2 Gz = 0 c-2 | Ix = 500 Нмс2 Iy = 1500 Нмс2 Iz = 2500 Нмс2 | 15% | 700 сек | 708.9 сек |
| 7 | Wx = 3 c-1 Wy = 0 c-1 Wz = 0 c-1 | Gx = 0 c-2 Gy = 0 c-2 Gz = 0 c-2 | Ix = 500 Нмс2 Iy = 1500 Нмс2 Iz = 2500 Нмс2 | 100% | 700 сек | 701.2 |
| 8 | Wx = 3 c-1 Wy = 0 c-1 Wz = 0 c-1 | Gx = 0 c-2 Gy = 0 c-2 Gz = 0 c-2 | Ix = 500 Нмс2 Iy = 1500 Нмс2 Iz = 2500 Нмс2 | 50% | 700 сек | 704.6 сек |
| 9 | Wx = 3 c-1 Wy = 0 c-1 Wz = 0 c-1 | Gx = 0 c-2 Gy = 0 c-2 Gz = 0 c-2 | Ix = 500 Нмс2 Iy = 1500 Нмс2 Iz = 2500 Нмс2 | 15% | 700 сек | 705.9 сек |
| 10 | Wx = 0 c-1 Wy = 1 c-1 Wz = 0 c-1 | Gx = 0 c-2 Gy = 0 c-2 Gz = 0 c-2 | Ix = 500 Нмс2 Iy = 1500 Нмс2 Iz = 2500 Нмс2 | 100% | 700 сек | 709.2 сек |
| 11 | Wx = 0 c-1 Wy = 1 c-1 Wz = 0 c-1 | Gx = 0 c-2 Gy = 0 c-2 Gz = 0 c-2 | Ix = 500 Нмс2 Iy = 1500 Нмс2 Iz = 2500 Нмс2 | 50% | 700 сек | 714.3. сек |
| 12 | Wx = 0 c-1 Wy = 1 c-1 Wz = 0 c-1 | Gx = 0 c-2 Gy = 0 c-2 Gz = 0 c-2 | Ix = 500 Нмс2 Iy = 1500 Нмс2 Iz = 2500 Нмс2 | 15% | 700 сек | 721.1 сек |
| 13 | Wx = 0 c-1 Wy = 1 c-1 Wz = 1 c-1 | Gx = 0 c-2 Gy = 0 c-2 Gz = 1 c-2 | Ix = 500 Нмс2 Iy = 1500 Нмс2 Iz = 2500 Нмс2 | 100% | 700 сек | 707.5 сек |
| 14 | Wx = 0 c-1 Wy = 1 c-1 Wz = 1 c-1 | Gx = 0 c-2 Gy = 0 c-2 Gz = 1 c-2 | Ix = 500 Нмс2 Iy = 1500 Нмс2 Iz = 2500 Нмс2 | 50% | 700 сек | 711.3 сек |
| 15 | Wx = 0 c-1 Wy = 1 c-1 Wz = 1 c-1 | Gx = 0 c-2 Gy = 0 c-2 Gz = 1 c-2 | Ix = 500 Нмс2 Iy = 1500 Нмс2 Iz = 2500 Нмс2 | 15% | 700 сек | 717.4 сек |
Результаты моделирования представлены в приложении Д. Как показали результаты моделирования, понижение неполной тяги при отказе ДС приводит к увеличению времени идентификации отказов. Моделирование показало также, что существенное повышение уровня шумов измерений не приводит к значительному снижению чувствительности системы к выявлению отказов типа "неотключение" с малой остаточной тягой.
6 ЭКОНОМИЧЕСКАЯ ЧАСТЬ
Достижения научно-технического прогресса в последние десятилетия позволили человечеству решить многие неразрешимые ранее технические и теоретические вопросы. Так, сегодня повседневным явлением стали запуски искусственных спутников Земли, космических аппаратов с человеком на борту, беспилотные межорбитальные аппараты, полёты автоматических станций. Одной из неотъемлемых составляющих космического аппарата – является система управления, включающая в себя командные приборы, исполнительные органы, БЦВМ и программный комплекс. Системы управления, относятся к разряду сложных систем с большим количеством элементов, которые подвержены отказам. Одним из основных требований, предъявляемых к системе управления, является ее высокая надежность. Управление космическим аппаратом с помощью БИНС рассматривается как взаимодействие двух процессов: решение навигационной задачи и решение задачи стабилизации. Первая задача заключается в определение требуемой траектории космического аппарата и в вычислении фактической, вторая – в управлении аппаратом для поддержания требуемого курса с заданной точностью. В БИНС инерциальный координатный базис строится не с помощью гироплатформы, а на основе математических расчетов проводимых в БЦВМ непосредственно в полете. Отказ реактивных двигателей стабилизации системы управления ориентацией космического аппарата, может приводить к не выполнению целевой задачи, а отказ типа «не отключение» двигателя, может приводить к большим потерям рабочего тела и раскрутке космического аппарата до недопустимых угловых скоростей. Таким образом разработка алгоритмов контроля и диагностики системы управления ориентацией космического аппарата – является актуальной задачей. В настоящей работе решается задача построения алгоритмов контроля и идентификации отказов командных приборов и исполнительных органов.
6.1 Обзор существующих методов
Отказ от использования гиростабилзированной платформы и перехода к бесплатформенным инерциальным навигационным системам связан с повышением точности командных приборов и интенсивным развитием цифровой вычислительной техникой, что позволяет решать задачу построения базовой ориентации математическими методами с использованием БЦВМ [1-5]. Наряду с этим значительно повышается сложность математической модели НКА и алгоритмов для системы управления ориентацией. Одной из важных задач, является идентификация отказов исполнительных органов СУО. Отказ ДС типа «не отключение» может привести к большим потерям рабочего тела и невыполнению целевой задачи СУО. Существующий метод идентификации отказов ДС как большой тяги так и малой, основан на контроль опасной продолжительности работы двигателей и подсчете времени базы  . Опасная продолжительность формируется в зависимости от значения управляющего момента [25]. При этом рассматривается два типа отказов – отказ типа «не включение» и отказ типа «не отключения». При этом на всех базах выбирается максимальный ОП и находится с помощью метода статистических гипотез критическая точка, позволяющая принять решение – есть отказ или нет. Максимальная точность выявлений отказа ДС с остаточной тягой, при использовании данного метода – 51% [25]. При превышении этого порога, алгоритм контроля двигателей стабилизации системы управления ориентацией космического аппарат не выявляет отказ. Это приводит к большим потерям рабочего тела, а следовательно и к значительным экономическим затратам, а также к невыполнению целевой задачи СУ, и как следствие срыву полетного задания, а иногда и полной потери управления КА [25, 26].
. Опасная продолжительность формируется в зависимости от значения управляющего момента [25]. При этом рассматривается два типа отказов – отказ типа «не включение» и отказ типа «не отключения». При этом на всех базах выбирается максимальный ОП и находится с помощью метода статистических гипотез критическая точка, позволяющая принять решение – есть отказ или нет. Максимальная точность выявлений отказа ДС с остаточной тягой, при использовании данного метода – 51% [25]. При превышении этого порога, алгоритм контроля двигателей стабилизации системы управления ориентацией космического аппарат не выявляет отказ. Это приводит к большим потерям рабочего тела, а следовательно и к значительным экономическим затратам, а также к невыполнению целевой задачи СУ, и как следствие срыву полетного задания, а иногда и полной потери управления КА [25, 26].
Предлагаемый в данной дипломной работе алгоритм контроля СУО основан на использовании субоптимального дискретного фильтра Калмана-Бьюси. Анализ величины оцениваемого в фильтре Калмана возмущающего момента позволяет вычислить математической ожидание оценки возмущения. Если математическое ожидание оценки возмущающего момента, вычисленного на некоторой временной базе, где управление равно нулю, превосходит допустимый порог, то принимается решение об отказе ДС и переходе на резерв. Как показало моделирование понижение остаточной тяги при отказе ДС в пять раз меньше, чем у существующих алгоритмов контроля, и составляет 10%. Это значительно повышает надежность СУО. А процент не выявления (10%) составляет процент внешних возмущающих воздействий, таких как аэродинамические и гравитационные. Это говорит о высокой эффективности разработанного алгоритма [25, 26].
Также в данной дипломной работе, разработан алгоритм контроля командных приборов ГИВУС и ДУП [21]. Отказ командным приборов может приводить к невыполнению целевой задачи СУ. Существующие алгоритмы имеют высокую погрешность при выявлении отказов чувствительных элементов. В основу существующих алгоритмов положен либо фильтр первого порядка, либо наблюдатель Люинбергера. Для повышения точности выявления отказавшего чувствительного элемента, в данной дипломной работе разработаны алгоритмы контроля командных приборов СУО, на основе субоптимального дискретного фильтра Калмана-Бьюси. Проведенное моделирование, показало высокую эффективность разработанного алгоритма по сравнению с существующими. В результате было повышено время выявления отказа чувствительный элемент, более точно выявляется отказавший чувствительный элемент [21, 25].
Разработанные алгоритмы контроля командных приборов и исполнительных органов в значительной мере повышают надежность системы управления ориентацией космического аппарата, и позволяют избежать потерь рабочего тела, и способствуют выполнению целевой задачи СУ. Это позволит снизить затраты на командные приборы и исполнительные органы, а также экономические затраты связанные с отказами в полете исполнительных органов и командных приборов [1, 3, 25].
6.2 Расчет сметы затрат на НИР
Выполнение научных исследований требует определенных затрат, которые необходимо рассматривать как дополнительные капиталовложения. Они относятся к производственным затратам и включают в себя все работы, выполняемые работниками организации [30].
При этом принимаем:
1) общее количество часов отладки и решения на ПВЭМ Т = 550 ч.
2) стоимость 1м2 площади в месяц Са = 35 грн.;
3) мощность ПВЭМ W = 0.4 кВт;
4) площадь помещения S = 13 м2 ;
5) стоимость электроэнергии 1 кВт/ч ТФ = 0,156 грн. (с ПДВ);
6) коэффициент невыходов а = 5%;
7) стоимость ПВЭМ Sk = 2900 грн.;
8) количество рабочих дней в месяц ДР = 23;
9) время работы на компьютере ТК = 4 мес.;
10) мощность осветительной электроэнергии Wоэ = 0,18 кВт;
11) время разработки НИР tр = 5 мес.
Рассчитаем эффективный фонд времени:
ТЭ = ДР * ТК *(1-а/100) = 87,4;
Расчет основной заработной платы исполнителей производится исходя из штатного расписания занятости исполнителей этой НИР, и приведен в таблице 6.1.
Расчет стоимости материала приведен в таблице 6.2.
Расчет сметы затрат на НИР с указанием формул расчета статей затрат приведен в таблице 6.3.
Таблица 6.1 – Штатное расписание исполнителей
| Должность | Количество исполнителей | Оклад в месяц, грн. | Время работы, мес. | Сумма, грн. |
| Руководитель, Начальник сектора | 1 | 650 | 5 | 3250 |
| Инженер-математик исследователь | 1 | 450 | 5 | 2250 |
| Лаборант | 1 | 300 | 5 | 1500 |
| Итого | 7000 | |||
Таблица 6.2 – Расходы на материалы
| Наименование | Цена за единицу, грн. | Количество, шт. | Сумма, грн. |
| Бумага (100 листов) | 5,50 | 2 | 11,00 |
| Папка для дипломных работ | 3,00 | 1 | 3,00 |
| Ручка | 1,00 | 7 | 7,00 |
| Карандаш | 0.50 | 8 | 4,00 |
| Записывающий CD (запись) | 30 | 3 | 90 |
| Лист формата А1 | 1,00 | 4 | 4,00 |
| Картридж для принтера | 155,00 | 1 | 155,00 |
| Дискета 1,44 МВ | 5,00 | 2 | 10,00 |
| Итого | 284,00 | ||
Таблица 6.3 – Смета затрат на НИР
| № | Статья затрат | Методика расчета | Сумма,грн. |
| 1 | Зарплата сотрудников, основная а) штатное расписание б) доплаты | Таблица 6.2.1 10% пункта 1а) | 7000 700 |
| 2 | Отчисления на соцстрах и другие отчисления | 37,5% пункта 1 | 2625 |
| 3 | Расходы на материалы | Таблица 6.2.2 | 284 |
| 4 | Затраты на эксперимент | - | - |
| 5 | Стоимость технологической электроэнергии | Sэ.т. = Тф* Т * W | 34,32 |
| 6 | Амортизационные отчисления вычислительной техники | Аотч = (0,25* Sk*Тк) /12 | 242 |
| 7 | Стоимость осветительной Электроэнергии | So = Тф * Тэ * Wоэ | 2.45 |
| 8 | Амортизационные отчисления площади рабочего места (аренда) | Sa = Са * S * t р | 2275 |
| 9 | Итого | Сумма | 13162.77 |
| 9 | Плановое накопление | 30% пункта 1 | 2100 |
| 10 | Всего смета затрат на НИР | 15262.77 |
Итого, в результате проведенных расчетов получили, что смета затрат на научно-исследовательскую работу составляет 15262.77 грн.
6.3 Расчет научно-технического эффекта
При расчете научно-технического эффекта используется следующая формула [30]:
 ,
,
где  - весовые коэффициенты i-ого показателя;
- весовые коэффициенты i-ого показателя;
 - виды признаков по i-ому показателю;
- виды признаков по i-ому показателю;
Исходные данные для расчета научно-технического экономического эффекта приведены в таблице 6.4.
Таблица 6.4 - Исходные данные для расчета НТЭ
| №Признака | Признаки научно-технического уровня | Значение
| Значение баллы
|
| 1 | Перспективность | 0.4 | 8 |
| 2 | Возможность реализации | 0.1 | 7 |
| 3 | Новизна | 0.5 | 9 |
Подставляя в исходную формулу соответствующие значения показателей, получим:
НТЭ = 8.4 балла
6.4 Расчет экономического эффекта
Экономический эффект – та выгода, в денежном выражении, которую будет получать предприниматель при внедрении результатов научно-исследовательской работы. Экономический эффект является абсолютной величиной [30].
где i - направление снижения затрат;
 - экономия по каждому направлению;
- экономия по каждому направлению;
 - нормативный коэффициент эффективности капиталовложений. В данном случае
- нормативный коэффициент эффективности капиталовложений. В данном случае  (экономический смысл таков, что возврат капиталовложений предполагает, что из вложенной одной гривны вернется 0.25 гривны):
(экономический смысл таков, что возврат капиталовложений предполагает, что из вложенной одной гривны вернется 0.25 гривны):
 - капиталовложения (смета затрат на НИР). В данном случае
- капиталовложения (смета затрат на НИР). В данном случае  ;
;
 - дополнительные капиталовложения (маркетинговые исследования, приобретение новой вычислительной техники и другие).
- дополнительные капиталовложения (маркетинговые исследования, приобретение новой вычислительной техники и другие).  .
.
В данной дипломной работе рассматриваются экономии по двум основным направлениям:
1. Экономия затрат рабочего тела.
Для данного направления учитывается разница между тем сколько потребляли ДС СУО рабочего тела до внедрения нового алгоритма контроля, и сколько буду потреблять рабочего тела после внедрения в СУО нового алгоритма контроля:
 ;
;
 - масса потребления ДС рабочего тела до внедрения нового алгоритма контроля;
- масса потребления ДС рабочего тела до внедрения нового алгоритма контроля;
 - масса потребления ДС рабочего тела после внедрения нового алгоритма контроля.
- масса потребления ДС рабочего тела после внедрения нового алгоритма контроля.
Тое есть, исходя из того, что масса потребления ДС рабочего тела после внедрения нового алгоритма контроля снизится в пять раз, то:
 ;
;
Также необходимо учесть стоимость рабочего тела (топлива):

Следовательно, экономия по первому направлению:

2. Экономия затрат рабочего тела связанная с временам выявления отказов чувствительных элементов ГИВУС.
Для данного направления учитывается разница между тем сколько времени требуется алгоритму контроля ГИВУС на выявление отказа ЧЭ до внедрения нового алгоритма, и после внедрения нового алгоритма контроля ГИВУС.

 - времени, которое требуется алгоритму контроля ГИВУС для выявление отказа ЧЭ до внедрения нового алгоритма контроля;
- времени, которое требуется алгоритму контроля ГИВУС для выявление отказа ЧЭ до внедрения нового алгоритма контроля;
 - времени, которое требуется алгоритму контроля ГИВУС для выявление отказа ЧЭ после внедрения нового алгоритма контроля;
- времени, которое требуется алгоритму контроля ГИВУС для выявление отказа ЧЭ после внедрения нового алгоритма контроля;
Мы можем вычислить массу потребления топлива за одну секунду:
- масса потребления ДС рабочего тела;
Таким образом разница выявления отказа:

А потребления топлива за одну секунду

Также необходимо учесть стоимость рабочего тела (топлива):
Следовательно, экономия по первому направлению:

В результате проведенных расчетов получим следующий экономический эффект:

Экономический эффект величина относительная и рассчитывается по формуле [30]:

где  - экономический эффект, - капиталовложения
- экономический эффект, - капиталовложения
Срок окупаемости капиталовложений:
 :
:
Следовательно срок окупаемости капиталовложений:
6.5 Заключение
В данной дипломной работе экономически обоснована разработка алгоритма контроля реактивных двигателей стабилизации системы управления космического аппарата и алгоритма контроля командных приборов СУО. Рассчитаны смета затрат на НИР, научно-технический эффект, экономический эффект и срок окупаемости капиталовложений. Совершенствование алгоритмов контроля осуществляется за счёт использования современной аппаратуры и развития научно-технического прогресса, а также за счёт более совершенных алгоритмов, которые используют комплексную обработку имеющейся информации [25, 30].
Результаты обоснований приведены в таблице 6.5:
Таблица 6.5 - Технико-экономические показатели НИР
| № п/п | Наименование показателей | Методика расчета | Величина |
| 1. | Смета затрат на НИР | Сумма статей затрат | 15262.77 |
| 2. | Научно-технический эффект | 
| 8.4 балла |
| 3. | Экономический эффект |
| 3328.38 грн |
| 4. | Срок окупаемости инвестиций | 
| 4.5 года |
7 ГРАЖДАНСКАЯ ОБОРОНА
Гражданская оборона Украины — составная часть системы общегосударственных оборонных мероприятий, проводимых в мирное и военное время в целях защиты населения и народного хозяйства от оружия массового поражения и других современных средств нападения противника, а также для спасательных и неотложных аварийно-восстановительных работ в очагах поражения и зонах катастрофического затопления. В данной дипломной работе рассматривается воздействие проникающей радиации и радиационного заражения [31, 32].
Основные задачи гражданской обороны:
1. Защита населения от оружия массового поражения и других средств нападения противника осуществляется проведением комплекса защитных мероприятий, что позволяет максимально ослабить результаты воздействия оружия массового поражения, создать благоприятные условия для проживания и деятельности населения, работы объектов и действий сил гражданской обороны при выполнении стоящих перед ними задач.
2. Повышение устойчивости работы объектов и отраслей народного хозяйства в условиях военного времени может быть достигнуто заблаговременным проведением организационных, инженерно-технических и других мероприятий, направленных на максимальное снижение результатов воздействия оружия массового поражения, создание благоприятных условий для быстрой ликвидации последствий нападения противника.
3. Проведение спасательных и неотложных аварийно восстановительных работ в очагах поражения и зонах затопления. Без успешного проведения таких работ невозможно наладить деятельность объектов, подвергающихся ударам противника, создать нормальные условия для жизнедеятельности населения пострадавших городов [31].
Проникающая радиация. Это один из поражающих факторов ядерного оружия, представляющий собой гамма-излучение и поток нейтронов, испускаемых в окружающую среду из зоны ядерного взрыва. Кроме гамма-излучения и потока нейтронов выделяются ионизирующие излучения в виде альфа- и бета-частиц, имеющих малую длину свободного пробега, вследствие чего их воздействием на людей и материалы пренебрегают. Время действия проникающей радиации не превышает 10—15 сек. с момента взрыва [32].
Основные параметры, характеризующие ионизирующие излучения,— доза и мощность дозы излучения, поток и плотность потока частиц.
Ионизирующая способность гамма-лучей характеризуется экспозиционной дозой излучения. Единицей экспозиционной дозы гамма-излучения является кулон на килограмм (Кл/кг). Согласно стандарту, кулон на килограмм — экспозиционная доза рентгеновского и гамма-излучений, при которой сопряженная корпускулярная эмиссия на 1 кг сухого атмосферного воздуха производит в воздухе ионы, несущие заряд в один кулон электричества каждого знака. На практике в качестве единицы экспозиционной дозы применяют несистемную единицу рентген (Р). Рентген — это такая доза (количество энергии) гамма-излучения, при поглощении которой в 1 см3 сухого воздуха (при температуре О С° и давлении 760 мм рт. ст.) образуется 2,083 миллиарда пар ионов, каждый из которых имеет заряд, равный заряду электрона, 1Р=2,58-10~4 Кл/кг; 1 Кл/кг = ^3876 Р или 1 Кл/кгя^3900 Р. Дозе 1 P соответствует поглощение 1 г воздуха 88 эрг энергии (8,8хЮ~3 Дж/кг), а 1 г биологической ткани —93 эрг (9,3х10~3 Дж/кг) [31, 32].
Единица мощности экспозиционной дозы — ампер на килограмм (А/кг), рентген в секунду (Р/с) и рентген в час (Р/ч). Ампер на килограмм равен мощности экспозиционной дозы, при которой за время, равное одной секунде, сухому атмосферному воздуху передается экспозиционная доза кулон на килограмм:
1 Р/с=2,58*10-4 А/кг; 1 А/кг=3876 Р/с или 1 А/кг≈3900 Р/с = 14*106 Р/ч; 1 Р/ч = 7,167-10-8 А/кг. Процесс ионизации атомов нейтронами отличен от процесса ионизации гамма-лучами. Поток нейтронов измеряется числом нейтронов, приходящихся на квадратный метр поверхности,— нейтрон/м2. Плотность потока — нейтрон/м2*с.
Степень тяжести лучевого поражения главным образом зависит от поглощенной дозы. Для измерения поглощенной дозы любого вида ионизирующего излучения Международной системой измерений «СИ» установлена единица Грэй (Гр); в практике применяется несистемная единица — рад. Грэй равен поглощенной дозе излучения, соответствующей энергии 1 Дж ионизирующего излучения любого вида, переданной облучаемому веществу массой 1 кг. Для типичного ядерного взрыва один рад соответствует потоку нейтронов (с энергией, превышающей 200 эВ) порядка 5*1014 нейтрон /м2 : 1 Гр = 1 Дж/кг = 100 рад=10000 эрг/г [31].
Распространяясь в среде, гамма-излучение и нейтроны ионизируют ее атомы и изменяют физическую структуру веществ. При ионизации атомы и молекулы клеток живой ткани за счет нарушения химических связей и распада жизненно важных веществ погибают или теряют способность к дальнейшей жизнедеятельности [32].
Поражение людей и животных проникающей радиацией. При воздействии проникающей радиации у людей и животных может возникнуть лучевая болезнь. Степень поражения зависит от экспозиционной дозы излучения, времени, в течение которого эта доза получена, площади облучения тела, Общего состояния организма. Экспозиционная доза излучения до 50—80 Р {0,013—0,02 Кл/кг), полученная за первые четверо суток, не вызывает поражения и потери трудоспособности у людей, за исключением некоторых изменений крови. Экспозиционная доза Р 200—300 Р, полученная за короткий промежуток времени (до четырех суток), может вызвать у людей средние радиационные поражения, но такая же доза, полученная в течение нескольких месяцев, не вызывает заболевания. Здоровый организм человека способен за это время частично вырабатывать новые клетки взамен погибших при облучении [31, 32].
При установлении допустимых доз излучения учитывают, что облучение может быть однократным или многократным. Однократным считается облучение, полученное за первые четверо суток, Облучение, полученное за время, превышающее четверо суток, является многократным. При однократном облучении организма человека в зависимости от полученной экспозиционной дозы различают четыре степени лучевой болезни.
Лучевая, болезнь первой (легкой) степени возникает при общей экспозиционной дозе излучения 100—200 Р (0,026—0,05 Кл/кг). Скрытый период может продолжаться две-три недели, после чего появляются недомогание, общая слабость, чувство тяжести в голове, стеснение в груди, повышение потливости, может наблюдаться периодическое повышение температуры. В крови уменьшается содержание лейкоцитов. Лучевая болезнь первой степени излечима [31].
Лучевая болезнь второй (средней) степени, возникает при общей экспозиционной дозе излучения 200—400 Р (0,05—0,1 Кл/кг). Скрытый период длится около недели. Лучевая болезнь проявляется в более тяжелом недомогании, расстройстве функций нервной системы, головных болях, головокружениях, вначале часто бывает рвота, понос, возможно повышение температуры тела; количество лейкоцитов в крови, особенно лимфоцитов, уменьшается более чем наполовину. При активном лечении выздоровление наступает через 1,5—2 мес. Возможны смертельные исходы — до 20 % [32].
Лучевая болезнь третьей (тяжелой) степени возникает при общей экспозиционной дозе 400—600 Р (0,1—0,15 Кл/кг). Скрытый период — до нескольких часов. Отмечают тяжелое общее состояние, сильные головные боли, рвоту, понос с кровянистым стулом, иногда потерю сознания или резкое возбуждение, кровоизлияния в слизистые оболочки и кожу, некроз слизистых оболочек в области десен. Количество лейкоцитов, а затем эритроцитов и тромбоцитов резко уменьшается. Ввиду ослабления защитных сил организма появляются различные инфекционные осложнения, Без лечения болезнь в 20—70 % случаев заканчивается смертью, чаще от инфекционных осложнений или от кровотечений [31, 32].
При облучении экспозиционной дозой более 600 Р (0,15 Кл/кг) развивается крайне тяжелая четвертая степень лучевой болезни, которая без лечения обычно заканчивается смертью в течение двух недель.
Лучевые болезни у животных развиваются при экспозиционных дозах: 150—250 Р — легкой степени, 250—400 Р — средней степени, 400—600 Р — тяжелой степени [31].
При взрывах ядерных боеприпасов средней и большой мощности зоны поражения проникающей радиации несколько меньше зон поражения ударной волной и световым излучением. Для боеприпасов малой мощности, наоборот, зоны поражения проникающей радиации превосходят зоны поражения ударной волной и световым излучением. Ориентировочные радиусы зон поражения для различных экспозиционных доз гамма-излучений и мощностей взрывов ядерных боеприпасов в приземном слое приведены в табл. 7.1 [32].
Таблица 7.1
| Экспозиционная доза | Расстояние от центра взрыва, км. | |||||
| Тротиловый эквивалент | ||||||
| Р | Кл/кг | 20 кт | 100 кт | 1 Мт | 5 Мт | 10 Мт |
| 500 | 0,13 | 1,2 | 1,65 | 2,4 | 3,0 | 3,4 |
| 300 | 0,678 | 1,4 | 1,8 | 2,6 | 3,2 | 3,6 |
| 200 | 0,052 | 1,5 | 1,9 | 2,8 | 3,4 | 3,9 |
| 100 | 0,026 | 1,6 | 2,1 | 3,0 | 3,6 | 4,2 |
| 50 | 0,013 | 1,8 | 2,25 | 3,2 | 3,8 | 4,5 |
Радиационные повреждения. При воздушных (приземных) и наземных ядерных взрывах плотности потоков (дозы) проникающей радиации на тех расстояниях, где ударная волна выводит из строя здания, сооружения, оборудование и другие элементы производства, в большинстве случаев для объектов являются безопасными. Но с увеличением высоты взрыва все большее значение в поражении объектов приобретает проникающая радиация. При взрывах на больших высотах и в космосе основным поражающим фактором становится импульс проникающей радиации. Проникающая радиация может вызывать обратимые и необратимые изменения в материалах, элементах радиотехнической, электротехнической, оптической и другой аппаратуры. В космическом пространстве эти повреждения могут наблюдаться на расстояниях десятков и сотен километров от центра взрывов мегатонных боеприпасов [31].
Необратимые изменения в материалах вызываются нарушениями структуры кристаллической решетки вещества вследствие возникновении дефектов (в неорганических и полупроводниковых материалах), а также в результате прохождения различных физико-химических процессов. Такими процессами являются: радиационный нагрев, происходящий вследствие преобразования поглощенной энергии проникающей радиации в тепловую; окислительные химические реакции, приводящие к окислению контактов и поверхностей электродов; деструкция и «сшивание» молекул в полимерных материалах, приводящие к изменению физико-механических и электрических параметров; газовыделения и образование пылеобразных продуктов, которые могут вызвать вторичные факторы воздействия (взрывы в замкнутых объемах, запыление отдельных деталей приборов и т. д.). В результате радиационного захвата нейтронов возможно образование примесей радиоактивных веществ. В процессе распада образовавшихся радиоактивных ядер происходит радиационное излучение, которое может оказывать воздействие на электрические параметры элементов и схем, а также затруднять ремонт и эксплуатацию аппаратуры. Наиболее опасны по вторичному излучению изделия, изготовленные из материалов, содержащих бор, марганец, кадмий, индий, серебро и др [31, 32].
Обратимые изменения, как правило, являются следствием ионизации материалов и окружающей среды. Они проявляются в увеличении концентрации носителей тока, что приводит к возрастанию утечки тока, снижению сопротивления в изоляционных, полупроводниковых, проводящих материалах и газовых промежутках. Обратимые изменения в материалах, элементах и аппаратуре в целом могут возникать при мощностях экспозиционных доз 1000 Р/с, Проводимость воздушных промежутков и диэлектрических материалов начинает существенно увеличиваться при мощностях доз 10000 Р/с и более [31].
Проникающая радиация, проходя через различные среды (материалы), ослабляется. Степень ослабления зависит от свойств материалов и толщины защитного слоя. Нейтроны ослабляются в основном за счет столкновения с ядрами атомов. Вероятность процессов взаимодействия нейтронов с ядрами количественно характеризуется эффективным сечением взаимодействия и зависит главным образом от энергии нейтронов и природы ядер мишени.
Энергия гамма-квантов при прохождении их через вещества расходуется в основном на взаимодействие с электронами атомов. Поэтому степень их ослабления практически обратно пропорциональна плотности материала.
Защитные свойства материала характеризуются слоем половинного ослабления, при прохождении которою интенсивность гамма-лучей или нейтронов уменьшается в два раза [32].
Если защитная преграда состоит из нескольких слоев различных материалов, например грунта, бетона и дерева, то подсчитывают степень ослабления для каждого слоя в отдельности и результаты перемножают:

где К — коэффициент ослабления одного защитного слоя преграды (материала); Косл — общий коэффициент защиты преграды, состоящей из n-го количества слоев различных материалов; h — толщина (высота) слоя материала, см; dпол — толщина слоя материала, ослабляющего излучение в два раза.
Толщина слоя половинного ослабления для нейтронного излучения определяется по справочным данным, для гамма-излучения может быть вычислена по плотности материала: dпол — 23/р, где р – плотность материала, г/см3; 23 см. — слой воды (плотность 1 г/см3), ослабляющей гамма-излучение ядерного взрыва в два раза [31].
Защитные сооружения гражданской обороны надежно обеспечивают защиту людей от проникающей радиации. Расчет защитных свойств этих сооружений производится по гамма-излучению, так как доза гамма-излучения значительно выше дозы нейтронного излучения, а слои половинного ослабления для строительных материалов приблизительно одинаковы.
На объектах, оснащенных электронной, электротехнической и оптической аппаратурой, следует предусматривать меры по защите этой аппаратуры от воздействия проникающей радиации. Повышение радиационной стойкости аппаратуры может быть достигнуто путем [32]:
- применения радиационностойких материалов и элементов;
- создания схем малокритичных к изменениям электрических параметров элементов, компенсирующих .и отводящих дополнительные токи, выключающих отдельные блоки и элементы на период воздействия ионизирующих излучений;
- увеличения расстояний между элементами, находящимися под электрической нагрузкой, снижения рабочих напряжений на них;
- регулирования тепловых, электрических и других нагрузок;
- применения различного рода заливок, не проводящих ток при облучении;
- размещения на объектах специальных защитных экранов или использования элементов конструкций объекта для ослабления действий ионизирующих излучений на менее радиационностойкие детали.
Заключение. Гражданская оборона несет непосредственную ответственность за защиту населения и экономики страны от оружия массового поражения и других средств нападения противника, а также за проведение спасательных и неотложных аварийно-восстановительных работ при ликвидации последствий нападения противника [32].
В организационном отношении гражданская оборона построена так, чтобы при необходимости она обеспечивала использование в своих интересах людских и материальных ресурсов, предусматривала успешное решение задач с наименьшим отрывом людей от их производственной деятельности.
Гражданская оборона, является одним из важнейших и основных средств защиты населения при военных действиях и стихийных бедствиях. Необходимость развития и усовершенствования гражданской обороны - повышается с каждым днем, в связи с ухудшением экологического состояния Украины, и Земли в целом. Интенсивное развитие ядерного и химического оружия, обуславливает разработку новых средств защиты для населения и государственных объектов стратегического значения [31, 32].
8 ОХРАНА ТРУДА И ОКРУЖАЮЩЕЙ СРЕДЫ
8.1 Общие вопросы охраны труда
Охрана труда представляет собой систему законодательных актов, социально-экономических, организационных, технических, санитарно-гигиенических и лечебно-профилактических мероприятий и средств, обеспечивающих безопасность, сохранение здоровья и работоспособности человека в процессе труда. Этот закон определяет основные положения по реализации конституционного права граждан на труд, охрану труда, охрану их жизни и здоровья, регулирует взаимоотношения между работниками и администрацией по вопросам охраны труда и распространяется на все виды деятельности. В Украине законодательство по охране труда состоит из Закона “Об охране труда”, Кодекса законов о труде и других нормативных актов. В таблице 8.1 приведены законы и нормативные документы, которые использованы в разделе.
Таблица 8.1 – Законы и нормативные документы, которые использованы в разделе
| № п/п | Обозначение закона или нормативного документа | Название закона или нормативного документа | Дата утверж-дения и введения в действие | Орган власти утвердивший документ |
| 1 | 2 | 3 | 4 | 5 |
| 1 2 3 4 5 6 7 8 9 10 11 12 - 13 14 | Закон Украины Закон Украины ГОСТ 12.0.003 – 74* ССБТ ГОСТ 12.1.005 – 88* ССБТ. ГОСТ 12.1.003 – 89. ССБТ ДНАОП 0.03-3.14-85 ГОСТ 12.1.012-90 ССБТ ДНАОП 0.00-1.31-99. ГОСТ 12.1.045 – 84 ССБТ ГОСТ 12.2.007.0-75 ССБТ. ГОСТ 14255-69 ДБН В.1.1 ГОСТ 12.1.004-91 ССБТ. ISO 14001-97 | Об охране труда Об охране окружающей природной среды Опасные и вредные производственные факторы. Классификация. Общие санитарно-гигиенические требования к воздуху рабочей зоны. Шум. Общие требования безопасности. Санітарні норми допустимих рівнів шуму на робочих місцях №3223-85 Вибрационная безопас-ность. Общие требования. Правила охр. труда при эксплуатации ЭВМ. Электростатические по-ля. Допустимые уровни на рабочих местах и тре-бования к проведению контроля. Изделия электрические. Общие требования безопасности Аппараты электричес-кие напряжением до 1000В. Оболочки. Степени защиты. Захист від пожежі. Пожежна безпека об’єктів будівництва. Пожарная безопасность. Общие требования. Система управления ок-ружающей средой. | 25.11.2002 г. 25.06.1991 г. Введен 01.01.1976. Введен 01.01.89. Введен 01.07.89 1985 Введ. 01.07.91. 10.02.1999 Введ. 01.07.85. Введ. 01.01.76. 1970 2002 Введ. 01.07.91. 1998 | Верховный Совет Украины Верховный Совет Украины Кабинет Министров Кабинет Министров Кабинет Министров Кабинет Министров Кабинет Министров Кабинет Министров Кабинет Министров Кабинет Министров Кабинет Министров Кабінет Міністров Кабинет Министров Кабинет Министров |
Улучшение условий труда, повышение его безопасности влияет на производительность труда, качество и себестоимость выпускаемой продукции, а также приводит к снижению производственного травматизма, профессиональных заболеваний, что сохраняет здоровье трудящихся и одновременно приводит к уменьшению затрат на оплату льгот и компенсаций за работу в неблагоприятных условиях, на лечение. Труд человека в современном производстве представляет собой процесс взаимодействия человека и машины, сопровождающийся исключительной, в большинстве случаев непроизвольной мобилизацией психологических и физических функций человека, приводящей в последствии к снижению работоспособности. Поэтому важным является соблюдение оператором режима труда и отдыха. Одним из важных средств охраны труда, обеспечивающим необходимые санитарно-гигиенические условия, сохраняющим здоровье трудящихся на производстве, способствующим высокой производительности труда является производственная санитария. К числу решаемых ею задач относят обеспечение в рабочей зоне микроклимата, требуемого для нормального самочувствия работающего, допустимых уровней шума и доз электромагнитного излучения.
Разработка программных продуктов (прикладных программ, алгоритмов) предполагает использование в качестве аппаратного обеспечения ПЭВМ, дополнительные средства графического вывода (принтер, сканер), а также бытовую технику в виде кондиционера для облегчения работы и поддержания необходимой температуры в помещении.
В таблице 8.2 приведен перечень опасных и вредных производственных факторов, а также источники их возникновения, имеющихся в условиях эксплуатации вышеперечисленного аппаратного обеспечения в соответствии с ГОСТ 12.0.003-74*.
Таблица 8.2 – Перечень вредных и опасных производственных факторов
| Наименование фактора | Источники возникновения |
| Высокое электрическое напряжение | Сеть питания ПЭВМ и других периферийных устройств |
| Повышенный уровень статического электричества | Высокое напряжение электронной лучевой трубки (ЭЛТ), диэлектрические поверхности |
| Электромагнитные излучения | ЭЛТ монитора |
| Повышенный уровень ионизации воздуха | Рентгеновское излучение монитора и статическое электричество |
| Рентгеновское излучение | ЭЛТ монитора |
| Повышенный уровень шума и вибрации | Устройства охлаждения ЭВМ, печатающие устройства |
| Повышенная пульсация светового излучения | Лампы дневного света, экран монитора |
| Неблагоприятные метеоусловия | Состояние систем отопления, вентиляции |
| Прямая и отраженная блескость | Внешние источники света, воздействующие на экран |
| Пожароопасность помещения | Наличие сгораемых материалов и источников зажигания |
| Психофизиологические факторы | Перенапряжение зрения, монотонность труда, умственные и эмоциональные перегрузки |
8.2 Производственная санитария
Разработанное программное обеспечение будет эксплуатироваться пользователем с использованием необходимых аппаратных средств, которые в свою очередь могут являться источниками каких-либо вредных факторов, то произведем анализ возникновения вредных факторов для пользователя и окружающей среды, используя для этого перечень вредных и опасных производственных факторов приведенных в таблице 8.2.
Научно – исследовательская работа относится к легким физическим работам, но характеризуется напряженным умственным трудом, то руководствуясь ГОСТ 12.1.005-88, относят к категории Ia (легкой), так как работа исследователя производится сидя, не требует систематического физического напряжения или поднятия и переноса тяжестей (расход энергии при выполнении работы до 139 Вт).
Допустимые и оптимальные значения параметров метеорологических условий в соответствии с категорией работ и в зависимости от периода года приведены в таблице 8.3.
Таблица 8.3 – Допустимые и оптимальные значения параметров микроклимата
| Катего-рия работ по тяжести | Период года
| Температура, 0С | Относи-тельная влаж-ность, % | Скорость движения воздуха в помещении, м\с | |
| Постоянные рабочие места | Непостоянные рабочие места | ||||
| Допустимые значения параметров | |||||
| 1а | Холод-ный | 19 – 25 | 17 – 23 | 75 | не более 0.1 |
| 1а | Теплый | 21 – 27 | 19 – 29 | 55 | 0.1 – 0.2 |
| Оптимальные значения параметров | |||||
| 1а | Холод-ный | 22 – 24 | 20 – 22 | 40 – 60 | 0.1 |
| 1а | Теплый | 23 – 25 | 21 – 27 | 40 – 60 | 0.1 |
Обеспечение условий, приведенных в таблице 8.3, в теплый период года должно выполняться при помощи кондиционера. В холодный период года обмен воздуха осуществляется с помощью кондиционера и централизованного водяного отопления согласно СНиП 2.04.05.-93 [33].
Задачей вентиляции и проветривания помещения является обеспечение чистоты воздуха и заданных метеорологических условий в производственных помещениях.
Состояние освещения производственных, служебных и вспомогательных помещений регламентируется СНиП ІІ–4–79 [34]. В светлое время используется боковое одностороннее естественное освещение, а в темное время суток – искусственное. Искусственное освещение по функциональному значению – рабочее, по способу расположения источников света – общее равномерное, так как светильники расположены в верхней зоне помещения равномерно.
Для создания комфортных условий зрительной работы средней точности необходимы следующие данные по нормам освещения, приведеные в таблице 8.4
Таблица 8.4 - Освещенность в производственном помещении
| Наименование помещения
| Площадь пола, кв. м.
| Разряд зрительной работы
| Освещение | ||
| Естественное | искусственное | ||||
| вид освеще-ния | КЕО, % | Нормиро-ванная освещенность Е, лк | |||
| Вычислитель-ный центр | 40 | IIIв | боковое | 1,53 | 300-500 |
Согласно СНиП II-4-79 [34] для выбранного объекта различения, фона и контраста объекта различения с фоном минимальное значение освещенности будет равно 300 лк.
Естественное освещение рабочих мест – боковое, значение коэффициента естественной освещенности (КЕО):  .
.
При пересчете КЕО для условий города Харькова (IV пояс светового климата) воспользуемся формулой:
где m — коэффициент светового климата;
c — коэффициент солнечного климата.
Для IV светового пояса выбираем m = 0.9. Исходя из ориентации окон по сторонам света c = 0.85. Тогда  .
.
В соответствие с ДНАОП 0.00-1.31-99 нормативный показатель КЕО должен быть не менее 1,5%.
В качестве источников света используются люминесцентные лампы мощностью 40 Вт или энергоэкономные мощностью 36 Вт типа ЛБ, ЛХБ, ЛЕЦ как наиболее эффективные и приемлемые с точки зрения спектрального состава, цветовая температура излучения которых находится в диапазоне 3500-4200 К.
Для освещения помещения применяются светильники серии ЛС004 с металлической экранирующей решеткой и непрозрачными боковинами.
Шум является одним из наиболее распространенных в производстве вредных факторов. При длительном воздействии шума человек быстро устает, раздражается, происходит перенапряжение слуховых анализаторов. В соответствии с ГОСТ 12.1.003-89 и ДНАОП 0.03-3.14-85 в вычислительных центрах эквивалентные уровни звука не должны превышать 50 дБА. Согласно ГОСТ 12.1.012-90 уровень вибрации для категории II, тип в, в условиях «комфорта» не должна превышать 75 дБ. Для уменьшения уровня звука и вибрации применяются демпфирующие материалы (отсек принтера с печатающей головкой закрывается крышкой, используется резиновая прокладка между принтером и столом).
Основным источником электромагнитного излучения, в том числе рентгеновского, в помещении являются электронно-лучевые трубки (ЭЛТ) мониторов. Согласно ДНАОП 0.00-0.31-99 мощность экспозиционной дозы рентгеновского излучения трубки в любой точке перед экраном на расстоянии 5 см от его поверхности не должна превышать 100 мкР/ч. Защита пользователей ЭВМ от ЭМИ и рентгеновского излучения обеспечивается с помощью экранов из специального затемненного стекла. Нормы ЭМИ для диапазона частот 15-25 кГц по электрической составляющей Е не должны превышать 50В/м, по магнитной составляющей Н – 5А/м.
Однако требования ТСО’95 более жесткие. Например, нормы Е и Н в том же диапазоне частот равны значениям 1 В/м и 20 мА/м.
Допустимые уровни напряженности электростатического поля на рабочем месте оператора, согласно ГОСТ 12.1.045-84, не должны превышать 20 кВ на метр. В помещениях для предотвращения образования статического электричества и защиты от него должны иметься нейтрализаторы и увлажнители воздуха, пол должен иметь антистатическое покрытие, а также необходимо делать заземление экрана дисплея.
Рентгеновское излучение и статическое электричество вызывает ионизацию воздуха с образованием положительных ионов, считающихся неблагоприятными для человека. Норма содержания легких аэроионов обоих знаков от 1500 до 5000 в 1 см3 воздуха ДНАОП 0.00-1.31-99. Мероприятиями по снижению количества ионов в воздухе являются увлажнение воздуха и проветривание помещения.
Для уменьшения воздействия рентгеновского излучения и ЭМИ экран снабжен специальным покрытием, снижающим уровень этого излучения. Также снижение интенсивности электромагнитного и рентгеновского излучений достигается сокращением времени облучения: общее время работы не должно превышать 4 часа за смену, длительность перерыва для отдыха должна составлять от 5 до 15 минут. Общий перерыв через 4 часа. Дополнительный перерыв через 3 часа и за 2 часа до окончания работы.
8.3 Техника безопасности
Эксплуатируемый персональный компьютер IBM PC не является источником механических и тепловых опасностей, но является потребителем электроэнергии. Поэтому, при рассмотрении вопросов техники безопасности ограничиваемся электробезопасностью.
Согласно ДНАОП 0.00 – 1.31 –99 при проектировании систем электроснабжения, при монтаже силового электрооборудования и электрического освещения и в зданиях и помещениях для ЭВМ необходимо придерживаться требований нормативно-технической документации.
ПЭВМ является однофазным потребителем электроэнергии, питающейся переменным током напряжением 220В и частотой 50Гц, от сети с заземленной нейтралью. По способу защиты человека от поражения электрическим током ЭВМ должно соответствовать первому классу защиты согласно ГОСТ 12.2.007.0-75. Защиту от случайного прикосновения к токоведущим частям обеспечивают конструктивные, схемно-конструктивные и эксплуатационные меры защиты. Комплекс необходимых мер по электробезопасности определяется, исходя из видов электроустановки, ее номинального напряжения, условий среды, типа помещения и доступности электрооборудования.
По степени опасности поражения электрическим током помещение относится к помещениям без повышенной опасности, в соответствии с ПУЭ-87 [12]. В ПУЭ-87 [33] предусмотрены следующие меры электробезопасности:
1) Конструктивные меры
IBM PC относится к электроустановкам до 1000В закрытого исполнения, все токоведущие части находятся в кожухах. В соответствии с ГОСТ 14255-69 и ПУЭ-87 [34] выбираем степень защиты персонала от соприкосновения с токоведущими частями внутри защитного корпуса и от попадания воды внутрь корпуса – IP-44.
2) Схемно-конструктивные меры
В качестве схемно-конструктивной меры безопасности предусматривается зануление в соответствии с ГОСТ 14255-69.Кроме того, используется двойная изоляция монитора и малые напряжения (менее 42 В).
В помещении размещено 5 компьютеров, поэтому кабель прокладывают в металлических трубах и гибких металлических рукавах с отводами. Если ЭВМ размещены в центре помещения электросеть прокладывается в каналах или под съемным полом в металлических трубах и гибких металлических рукавах.
Произведем расчет зануления в соответствии с требованиями [33].
Схема электроснабжения зануляемой электроустановки представлена на рисунке 8.1:
Рисунок 8.1 – Схема электроснабжения зануляемой электроустановки
где
ТрU1/U2 – трансформатор масляный понижающий , схема соединения обмоток – звезда-звезда;
СШ – сборная шина;
РЩ – распределительный щит;
А.З. – аппарат защиты;
L1 – длина участка сети от распределительного щита до электроустановки;
L2 – длина участка сети от понижающего трансформатора до распределительного щита
R0 – сопротивление заземлителя нейтральной точки;
Р1 – мощность потребителя (компьютеры, принтер, ксерокс, электроосвещение);
Электросеть выполнена как двухпроводная сеть, состоящая из фазного провода и нулевого защитного проводников.
L1=45 м; L2=450 м; P1=2550 Вт.
Материал жилы – медь, способ прокладывания:
1-й участок – в металлической трубе; 2-й участок – в земле.
Произведем расчет автомата отключения.
Постановка задачи зануления электроустановки: определение такого сечения нулевого защитного проводника при котором ток короткого замыкания Iкз в заданное число раз К превысит номинальный ток срабатывания аппарата защиты Iном, что обеспечит отключение поврежденного потребителя.
1) Выбор типа автоматического выключателя.
1а) Определение тока, питающего электроустановки мощностью Р1 = 2550 Вт:
I1н = Р1/UФ = 2550/220 = 11,59 А,
где Uф – фазное напряжение (220 В);
1б) Определение расчетной величины тока срабатывания защитного аппарата:
Iрасч = (Кп/Кт)*I1н = (3/2.5)*11,59 = 13,909 А.
где Кп = 3 – коэффициент кратности пускового тока;
Кт = 2.5 – коэффициент тяжести пуска электроустановки (зависит от времени пуска: t = 5 с, пуск легкий).
1в) Выбор типа автоматического выключателя и определение величины тока срабатывания аппарата защиты:
Iном = 16 А; тип автоматического выключателя АЕ2026.
2) Определение тока короткого замыкания фазы на корпус электроустановки:
Iкз=Uф/Zпфн.
Zпфн – сопротивление петли фаза-ноль.
2а) Сечение фазного провода определяется в зависимости от допустимого длительного тока, способа прокладки проводов и материала проводов:
Для нахождения сечения провода, определим диаметр провода d. Где d определяют по значению тока I [A], и допустимой плотности тока J [A/мм2]. Табличное значение: J = 5 [A/мм2].
 ;
;
I =I1н ,тогда:
d = 1.78 мм;
Sф1 =  = 2,5мм2;
= 2,5мм2;
0,5* Sф1  Sн1 Sф1
Sн1 Sф1
Sн1 = Sф1 = 2,5 мм2
Согласно требованиям ДНАОП 0.00 – 1.31 – 99, площадь сечения нулево-го рабочего и нулевого защитного проводников в однофазной 3-х проводной сети должны быть равны: где Rнз – нулевое защитное сопротивление.
2б) Определение сопротивления фазного проводника
Rф1 =  *L1/Sф1 = 0,018*45/2.5 = 0,3226 Ом
*L1/Sф1 = 0,018*45/2.5 = 0,3226 Ом
Rн1 = Rф1* L1 = 0, 3226 Ом
2в) Потери напряжений Uп1 на 1-м и Uп2 на 2-м участках не должны превышать 22 В.
Uп1+Uп2  22 В;
22 В;
Uп1 = I1н*Rф1 = 11,59*0, 3226 = 3,738 В;
Uп1 U1д 9 В;
U1д – допустимое потеря напряжения;
2г) Определяем мощность P2 и проделываем аналогичные вычисления, как и для P1
P1=2,55 кВт, тогда P2=100* P1=255 кВт,
I2н = Р2/UФ = 255000/220 = 1159,09,
;
I =I2н ,тогда:
d = 17,204 мм;
Sф2 = = 232.342 мм2;
0,5* Sф2 Sн2 Sф2
Sн2 = Sф2 = 232.342 мм2
Rф2 = *L2/Sф2, где = 0.018 Ом*мм2/м.
Rф2 = 0.018*450/232.342 = 0,01296 Ом
Rф2 = Rн2= 0,01296 Ом
2д)Потери напряжений Uп2 на 2-м участках :
Uп2 = I2н*Rф2 = 1159,09*0,01296 = 15,02 В;
Uп2 22-U1д
Проверяем необходимое выполнение условия Uп1+Uп2 =3,738+15,02; тогда 18,758 < 22В – условие выполняется
2е) Определение полного сопротивления трансформатора.
Выбираем мощность силового трансформатора Nтр. Для масляного транс-форматора при схеме соединения обмоток звезда-звезда и напряжении на первичной обмотке до U=20-35 кВ:
Nтр = f(Р2) = 4*Р2.
Nтр = 4*Р2 = 4*255 = 1020 кВт.
Выбираем сопротивление обмотки трансформатора по таблице
Zтр = f (Nтр) = 0,121 Ом.
2ж) Определяем полное сопротивление петли фаза-нуль Zпфн и ток короткого замыкания на замкнутый корпус Iкз:
 ,
,
где x – сопротивление взаимоиндукции и индуктивного сопротивления.
Для медных проводников и в случае совместного проложения фазного, нулевого рабочего и нулевого защитного  .Сделав необходимые вычисления получим:
.Сделав необходимые вычисления получим:
Zпфн = 0,64 Ом;
Iкз = Uф/Zпфн = 220/0,64 = 343,75 A.
3) Проверка выполнения условий надежности работы зануления.
Должно выполняться условие Iкз  к*Iном, где к=3 – коэффициент запаса защиты при защите автоматическими выключателями.
к*Iном, где к=3 – коэффициент запаса защиты при защите автоматическими выключателями.
343,75 41,727 – условие выполняется.
Вывод: Для обеспечения отключения электроустановки в короткое время необходимо использовать автоматический выключатель АЕ2026 с током сра-батывания Iном = 16 А; на первом участке сети (от распределительного щита до электроустановки) – нулевой защитный провод сечением Sн1 = 2,5 мм2.
Эксплутационные меры
Необходимо соблюдать правила техники безопасности при работе с высоким напряжением и следующие меры предосторожности:
– монтаж, обслуживание, ремонт и наладка ЭВМ, замена деталей, приспособлений и блоков должна осуществляться только при полном выключении питания;
– в помещениях, где эксплуатируется больше 5 компьютеров на видном и доступном месте устанавливается аварийный и резервный выключатель для полного отключения электропитания;
– заземленные конструкции помещения должны быть надежно защищены диэлектрическими щитками или сетками от случайного проникновения.
Работник, поступающий на работу, обязательно проходит вводный и первичный инструктаж по технике безопасности в целях профилактики несчастных случаев, а также знакомится с инструктажем по соблюдению мер техники безопасности при работе с ПЭВМ.
8.4 Пожарная безопасность
Согласно с требованием ГОСТ 12.1.004-91 пожарная безопасность обеспечивается следующими нормами:
– системой предотвращения пожаров;
– системой пожарной защиты;
– организационными мероприятиями по пожарной безопасности.
Предотвращение пожара достигается следующими мерами: предотвращение образования горючей среды, предотвращение образования в горючей среде источников зажигания.
Для уменьшения опасности образования в горючей среде источников зажигания предусмотрено:
а) использование электрооборудования, соответствующего классу пожароопасной зоны П-IIa, для которой степень защиты оболочки электрооборудования должна быть не менее IP-44, степень защиты светильников IP-23;
б) молниезащита зданий, сооружений и оборудования (для условий города Харькова со средней грозовой деятельностью 20 часов в год и более установлена III категория молниезащиты). Молниеотвод выполнен в соответствии с требованием [34];
в) обеспечение защиты от короткого замыкания;
г) применение заземления экрана для стока статического электричества и др.
Помещение, в котором выполнялась дипломная работа, расположено на четвертом этаже шестиэтажного здания. В ней находится 6 компьютера. Размеры комнаты: длина-8м, ширина-5м, высота-4,2м. Общая площадь состав-ляет 40 м2, что соответствует требуемым нормам ДНАОП 0.00-1.31-99, согласно которым на одно рабочее место должно приходится не менее 6,0 м2.
По категории взрыво- и пожароопасности согласно ОНТП-86 [35] данное помещение относится к категории В – пожароопасное из-за твердых сгораемых материалов (рабочие столы, бумага, изоляция и др.). Исходя из категории пожароопасности и этажности здания, степень огнестойкости здания II согласно ДБН В 1.1-2002 и СНиП 2.09.02-85 [36].
При выборе средств тушения пожара для обеспечения безопасности человека от возможного поражения электрическим током в помещении предус-мотрено использовать углекислотные огнетушители ВВК-7 емкостью 7 литра. Огнетушители находятся на видном и легко доступном месте (см. таблицу 5.5). При возникновении пожара предусмотрена возможность сообщения в пожарную охрану по телефону [37].
В системе пожарной защиты предусмотрены следующие меры:
1. Система автоматической пожарной сигнализации оснащена дымовыми сигнализаторами.
2. Помещение оснащено углекислотными огнетушителями – ВВК-7.
3.Для успешной эвакуации персонала двери помещения имеют следующие размеры:
– ширина не менее 1.5 м;
– высота не менее 2.0 м.
Ширина коридора 1.8 м. Рабочее помещение должно иметь два выхода. Расстояние от наиболее удаленного рабочего места не должно превышать 100 м.
Организационными мероприятиями пожарной профилактики является обучение производственного персонала противопожарным правилам, издание необходимых инструкций и плакатов, средств наглядной агитации. Обязательным является наличие плана эвакуации.
Таблица 8.5 – Перечень первичных средств пожаротушения, обязательных в вычислительном центре
| Пло-щадь, кв.м. | Первичные Средства пожаротушения (тип, наименование) | Кол-во, шшт. | Огнегасящий эффект |
| 40 | углекислотные огнетушители ВВК-7, войлок, кошма, песок | 2 | Разбавление воздуха углекислым газом и снижение в нем содержания кислорода до концентрации, при которой прекращается горение. Огнетушащий эффект указанным газом обуславливается потерями теплоты и снижением теплового эффекта реакции прекращение доступа кислорода к горящим элементам. |
8.5 Охрана окружающей среды
25 июня 1991 года принят Закон Украины «Об охране окружающей природной среды» (редакции Закона 1993, 1996 г.). Закон определяет правовые, экономические, социальные основы охраны окружающей среды.
Задачей законодательства об охране окружающей среды является регулирование отношений в области охраны природы, использовании и воспроизводстве природных ресурсов, обеспечении экологической безопасности, предупреждения и ликвидации отрицательного воздействия хозяйственной и иной деятельности на окружающую среду, сохранение природных ресурсов, генетического фонда нации, ландшафтов и других природных объектов.
При массовом производстве мониторов нельзя не учитывать их влияние на окружающую среду на всех стадиях их «жизни» при изготовлении, эксплуатации, окончания срока службы. Сегодня действуют экологические стандарты, которые определяют требования к производству и материала. Они не должны содержать фреонов, хлоридов и бромидов (BS 7750) ТСО '95.
В стандарте ТСО '99 допускается ограничение использования кадмия в светочувствительном слое экрана дисплея и ртути в батарейках. Аппараты, тара и документация должны допускать нетоксичную переработку после использования. Международные стандарты, начиная с ТСО '92, включают требования пониженного электропотребления и ограничивают допустимые уровни мощности потребляемой энергии в неактивном режиме.
Работа на ПК типа Intel Pentium-Ill не оказывает вредного воздействия на окружающую среду. После истечения срока службы он полностью подлежит вторичной переработке. Необходимо выполнять требования стандарта ISO -14000, который определяет требования к организации производственного процесса с минимальным ущербом, для окружающей природной среды.
Ужесточение требований к производству и материалам, а также разработка новых производственных и утилизационных технологий позволяет уменьшить антропогенную нагрузку на окружающую среду.
Соблюдение приведенных правил и норм безопасности позволяет улучшить условия труда в помещении.
ЗАКЛЮЧЕНИЕ
В данной дипломной работе:
1. Разработаны и изучены математические модели: упругого космического аппарата, командных приборов (ГИВУС), исполнительных органов – двигатели стабилизации большой и малой тяги (ДБТ, ДМТ).
2. Разработан алгоритм функционирования СУО, включающий в себя: алгоритм стабилизации СУ, алгоритм идентификации отказов исполнительных органов СУ на базе субоптимального фильтра Калмана-Бьюси, алгоритм диагностики отказов чувствительных элементов ГИВУС на базе фильтра Льюинбергера, алгоритм остаточной тяги.
3. На базе разработанных алгоритмов было проведено математическое моделирование СУО с учетом моментов внешних сил (аэродинамических и гравитационных). Результаты моделирования показали высокую эффективность разработанных алгоритмов. Так идентификация ДС при остаточной тяге 15% составила - 5.3 сек, а для диагностики чувствительных элементов ГИВУС потребовалось 3 такта БЦВМ.
4. Разработанные алгоритмы имеют практическую ценность и могут в дальнейшем усовершенствоваться. Так для диагностики и контроля отказов чувствительных элементов ГИВУС, можно использовать фильтр Калмана, нейронные сети и элементы искусственного интеллекта.
.
СПИСОК ИСТОЧНИКОВ ИНФОРМАЦИИ
1. Раушенбах Б.В., Токарь Е.Н. Управление ориентацией космических аппаратов. - М.: Наука, 1974. - 600 с.
2. Синяков И. М. Системы управления упругими подвижными объектами. – Л.: ЛГУ, 1981. – 200 с.
3. Разыграев А. П. Основы управления полетом космических аппаратов и кораблей. – М.: Машиностроение, 1977. – 472 с.
4. Алексеев К. Б., Бебенин Г. Г. Управление космическими летательными аппаратами. – М.: Машиностроение, 1974. – 340 с.
5. Бранец В.Н., Шмыглевский И.П. Применение кватернионов в задачах ориентации твердого тела. - М.: Наука, 1973. - 320 с.
6. Инженерный справочник по космической технике. Изд. 2-е, перераб. и доп. Под ред. А.В.Солодова. - М.: Воениздат, 1977. – 430 с.
7. Кузовков Н.Т. и др. Непрерывные и дискретные системы управления и методы идентификации. - М.: Машиностроение, 1978. – 222 с.
8. Колесников К.С., Сухов В.Н. Упругий летательный аппарат как объект автоматического регулирования. - М.: Машиностроение, 1974 – 266 с.
9. Бранец В.Н., Шмыглевский И.П. Введение в теорию бесплатформенных инерциальных навигационных систем. – М.: Наука, 1992. – 280 с.
10. Киреев Н.Г. Условия полета и траектории движения беспилотных летательных аппаратов. – К.: УМК ВО, 1993. – 212 с.
11. Киреев Н.Г. Динамика полета и управление. – К.: УМК ВО, 1990.
12. Анучин О.Н., Емельянцев Г.И. Бесплатформенные инерциальные системы навигации и ориентации (БИНС и БИСО). Учебное пособие. – СПб.: ИТМО, 1995. – 110 с.
13. Киреев Н.Г. Системы управления беспилотных летательных аппаратов. – К.: УМК ВО, 1993. – 160 с.
14. Киреев Н.Г. Элементы систем управления ракет и космических аппаратов. – К.: УМК ВО, 1992.
15. Несенюк Л.П. Бесплатформенные инерциальные системы. Обзор состояния и перспектив развития // Гироскопия и навигация. - № 1 (36). – 2002. – С. 13-23.
16. Кузовков Н. Т. Модальное управление и наблюдающие устройства. – М.: Машиностроение, 1976. – 187 с.
17. Науменко К. И. Наблюдение и управление движением динамических систем. – Киев: Наукова думка, 1984. – 208 с.
18. Панов А.П. Математические основы теории инерциальной ориентации. – Киев: Наукова думка, 1995. – 280 с
19. Плаксий Ю.А., Фролов Ю.А. Алгоритм определения ориентации свободно вращающегося твердого тела с учетом его инерционных характеристик. – Харьков, 1984. – 10 с. Рук. предст. ХПИ. Деп. в УкрНИИТИ, № 1551 Ук-84 Деп.
20. Хемминг Р.В.“Численные методы для научных работников и инженеров ”: Пер с англ.:Под редакцией Р.С.Гутера .- гл. ред. физ. мат. лит. 1968. 203 с.
21. Пельпор Д.С. Гироскопические системы ориентации и стабилизации. Справочное пособие. - М.: Машиностроение, 1982, 165 с.
22. Кузовков Н.Т., Салычев О.С. Инерциальная навигация и оптимальная фильтрация. – М.: Машиностроение, 1982. – 216 с.
23. Евланов Л.Г. Контроль динамических систем. Изд. 2-е перераб. и доп. – М.: Наука, 1979, - 432 с.
24. Киреев Н.Г. Аппроксимация и идентификация в задачах динамики полета и управления. – К.: УМК ВО, 1992.
25. Кузнецов Ю.А, Уханов Е.В. Применение фильтра Калмана в задаче идентификации отказов двигателей стабилизации космического аппарата // Вестник НТУ ХПИ. № 19’ 2004, Харьков. – С. 121-126.
26. Техническое задание на разработку гироскопического измерителя вектора угловой скорости системы управления астрофизического модуля автоматических космических аппаратов серии «Спектр» 11014/09-97. НПП ХА, 1997.
27. Острем К.Ю. Введение в стохастическую теорию управления. Пер. с англ. С.А. Анисимова. – М.: Мир, 1973. – 320с.
28. Ширяев А.Н. Вероятность М. «Наука» 1988, 305с.
29. Дж. Ортега , У.Пул Введение в численные методы решения дифференциальных уравнений. Пер.с англ.; под редакцией А.А.Абрамова - М.;Наука.Гл.ред.физ.мат.лит.1986. 288с.
30. Макконел, К.Р. Брю С.Л. Экономикс – принципы, проблемы и политика пер. с англ. 2-ое изд. К.; Хагар-Демос 1993, 785с.
31. АтаманюкВ.Г. и др. Гражданская оборона 2-е изд.– М.: Высш. шк., 1987, - 288с.
32. Демиденко Г.П. и др. Защита объектов народного хазяйства от оружия массового поражения: Справочник –К.:Высш. шк., 1989, - 287с.
33. СНиП 2.04.05-93 Нормы проектирования. Отопление, вентиляция и кондиционирование. - М.: Стройиздат, 1994, 64 с.
34. СНиП П-4-79. Строительные нормы и правила. Естественное и
искусственное освещение. Нормы проектирования. - М.: Стройиздат, 1980, ПО
74 с.
35. ПУЭ 87. Правила устройства электроустановок. М.:
Энерогоатомиздат, 1987, 648 с.
36. ОНТП 24-86. Общесоюзные нормы технологического
проектирования. Определение категорий зданий и сооружений по взрыво - и
пожароопасности, -М.: Стройиздат., 1987, 128 с.
37. СНиП 2.09.02-85. Строительные нормы и правила. Производственные здания промышленных предприятий. Нормы проектирования.- М.:Стройиздат., 1986, 208 с.
ПРИЛОЖЕНИЕ А
КОЭФФИЦИЕНТЫ ОСЦИЛЛЯТОРОВ
Epsilon
| 0.06 | 0.09 | 0.16 | 0.28 |
WQi^2
| 4,80 | 7,50 | 23,70 | 80,50 |
Коэффициенты AX
| 0.00000000209 | -0.000000173 | 0.00000000157 | 0.00000000142 |
| -0.00000000209 | -0.000000173 | 0.00000000157 | 0.00000000142 |
| -0.00000000209 | 0.0000000297 | -0.00000000157 | -0.00000000142 |
| 0.00000000209 | 0.0000000297 | -0.00000000157 | -0.00000000142 |
| 0.00000000209 | -0.000000212 | 0.00000000157 | 0.00000000142 |
| -0.00000000209 | -0.000000212 | 0.00000000157 | 0.00000000142 |
| -0.00000000209 | 0.0000000688 | -0.00000000157 | -0.00000000142 |
| 0.00000000209 | 0.0000000688 | -0.00000000157 | -0.00000000142 |
Коэффициенты AY
| 0.000000421, | 0.0 | 0.0000000562 | 0.000000164 |
| 0.000000421, | 0.0 | 0.0000000562 | 0.000000164 |
| -0.000000148, | 0.0 | 0.0000000562 | 0.0000000146 |
| -0.000000148, | 0.0 | 0.0000000562 | 0.0000000146 |
| 0.000000422, | 0.0 | -0.0000000256 | 0.000000123 |
| 0.000000422, | 0.0 | -0.0000000256 | 0.000000123 |
| -0.000000367, | 0.0 | -0.0000000256 | 0.0000000862 |
| -0.000000367, | 0.0 | -0.0000000256 | 0.0000000862 |
Продолжение ПРИЛОЖЕНИЯ А
Коэффициенты AZ
| 0.0000000344 | 0.000000439, | 0.0 | 0.00000000906 |
| -0.0000000344 | 0.000000439, | 0.0 | 0.00000000906 |
| -0.0000000344 | 0.000000439, | 0.0 | 0.00000000906 |
| 0.0000000344 | 0.000000439, | 0.0 | 0.00000000906 |
| 0.0000000344 | -0.000000202, | 0.0 | 0.00000000906 |
| -0.0000000344 | -0.000000202, | 0.0 | 0.00000000906 |
| -0.0000000344 | -0.000000202, | 0.0 | 0.00000000906 |
| 0.0000000344 | -0.000000202, | 0.0 | 0.00000000906 |
ПРИЛОЖЕНИЕ Б
Результаты моделирования СУО
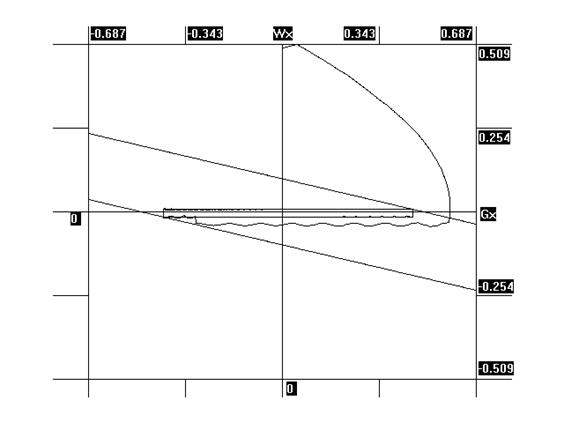
Рисунок Б.1 – Фазовый портрет, соответствующий процессу стабилизации с НУ 1-ого варианта табл. 5.1 в канале X.
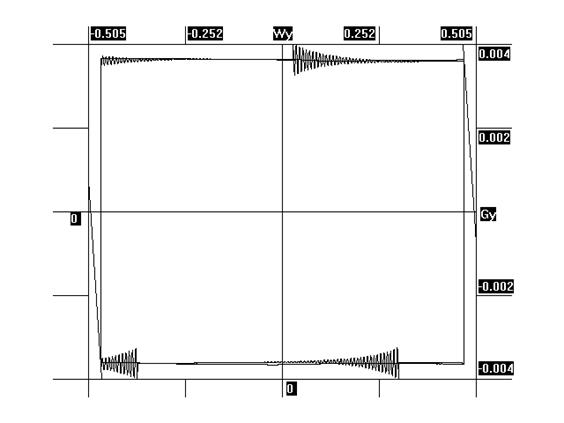
Рисунок Б.2 – Фазовый портрет, соответствующий процессу стабилизации с НУ 1-ого варианта табл. 5.1 в канале Y.
Продолжение ПРИЛОЖЕНИЯ Б
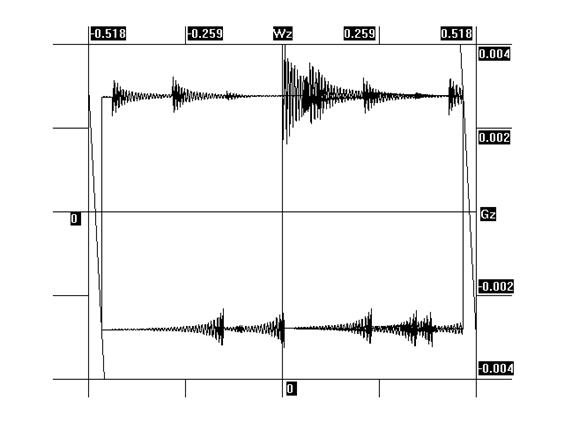
Рисунок Б.3 – Фазовый портрет, соответствующий процессу стабилизации с НУ 1-ого варианта табл. 5.1 в канале Z.
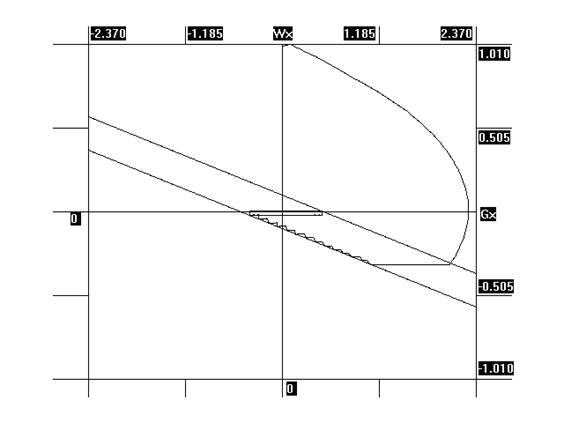
Рисунок Б.4 – Фазовый портрет, соответствующий процессу стабилизации с НУ 2-ого варианта табл. 5.1 в канале X
Продолжение ПРИЛОЖЕНИЯ Б
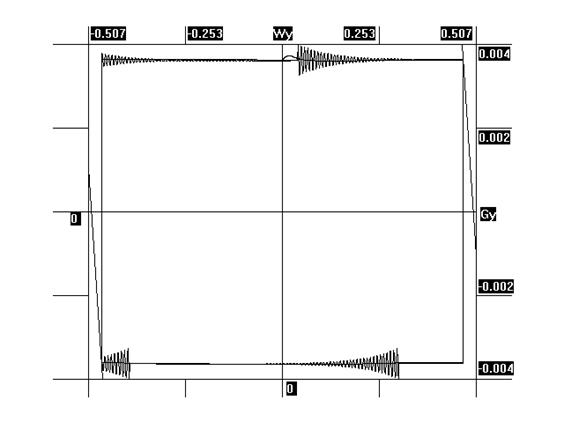
Рисунок Б.5 – Фазовый портрет, соответствующий процессу стабилизации с НУ 2-ого варианта табл. 5.1 в канале Y
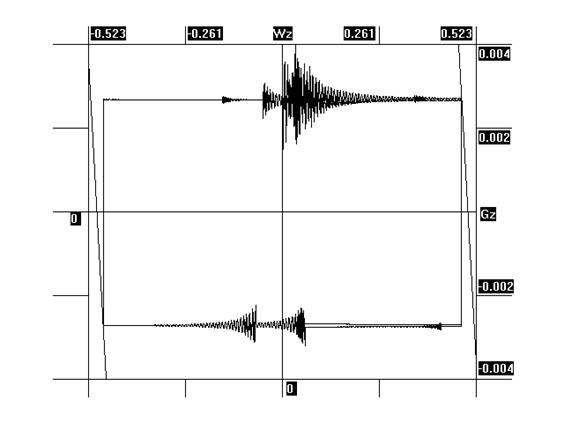 .
.
Рисунок Б.6 – Фазовый портрет, соответствующий процессу стабилизации с НУ 2-ого варианта табл. 5.1 в канале Z
Продолжение ПРИЛОЖЕНИЯ Б
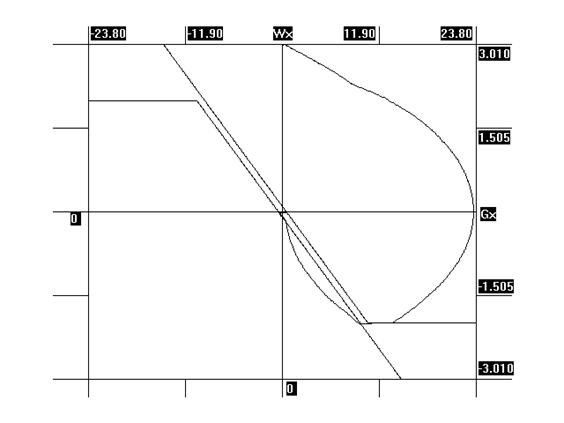
Рисунок Б.7 – Фазовый портрет, соответствующий процессу стабилизации с НУ 3-ого варианта табл. 5.1 в канале X
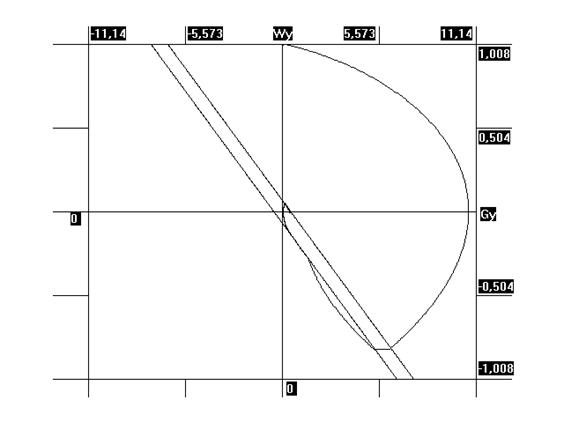
Рисунок Б.8 – Фазовый портрет, соответствующий процессу стабилизации с НУ 3-ого варианта табл. 5.1 в канале Y
Продолжение ПРИЛОЖЕНИЯ Б
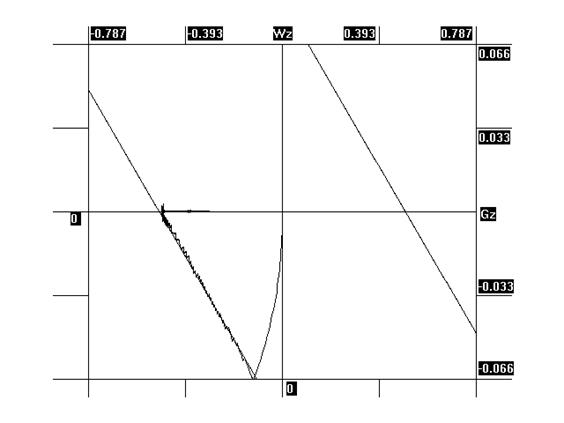
Рисунок Б.9 – Фазовый портрет, соответствующий процессу стабилизации с НУ 3-ого варианта табл. 5.1 в канале Z
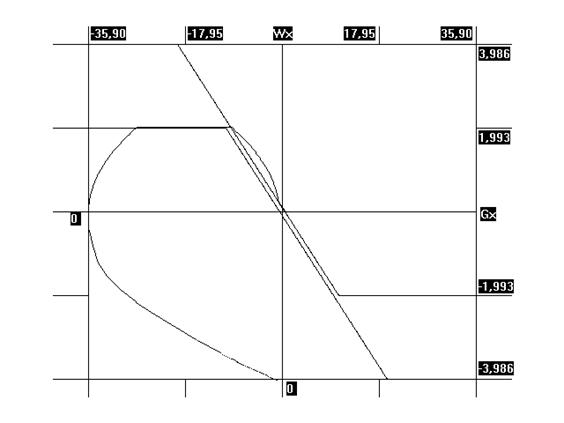
Рисунок Б.10 – Фазовый портрет, соответствующий процессу стабилизации с НУ 4-ого варианта табл. 5.1 в канале X
Продолжение ПРИЛОЖЕНИЯ Б
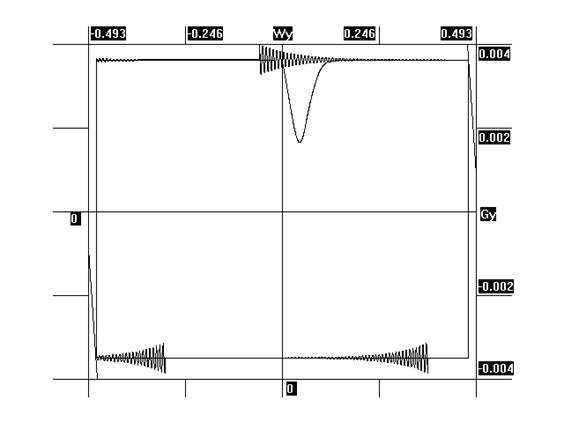
Рисунок Б.11 – Фазовый портрет, соответствующий процессу стабилизации с НУ 4-ого варианта табл. 5.1 в канале Y.
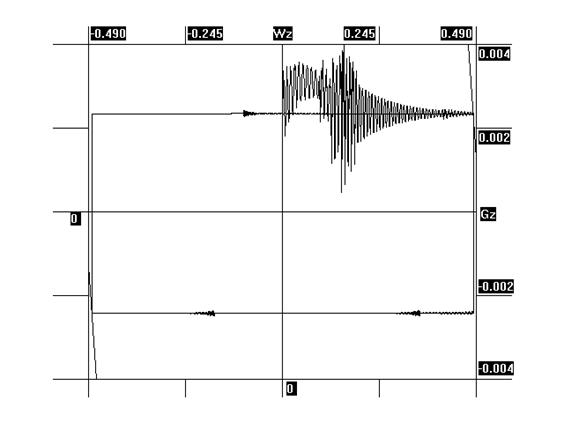
Рисунок Б.12 – Фазовый портрет, соответствующий процессу стабилизации с НУ 4-ого варианта табл. 5.1 в канале Z.
Продолжение ПРИЛОЖЕНИЯ Б
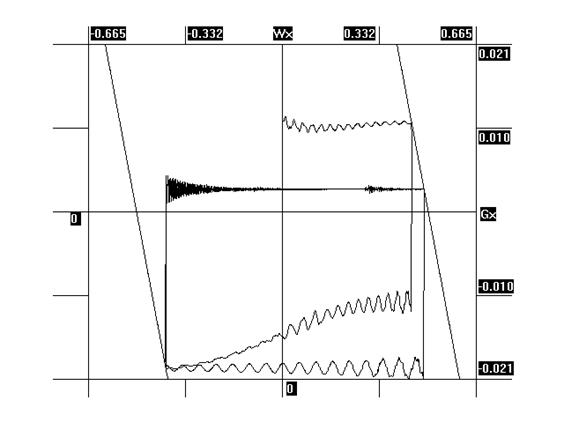
Рисунок Б.13 – Фазовый портрет, соответствующий процессу стабилизации с НУ 5-ого варианта табл. 5.1 в канале X.
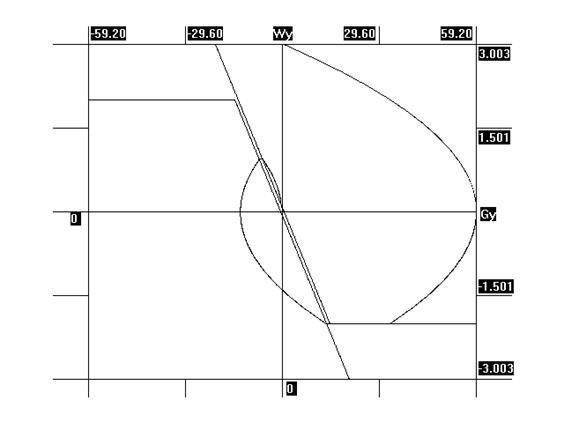
Рисунок Б.14 – Фазовый портрет, соответствующий процессу стабилизации с НУ 5-ого варианта табл. 5.1 в канале Y.
Продолжение ПРИЛОЖЕНИЯ Б
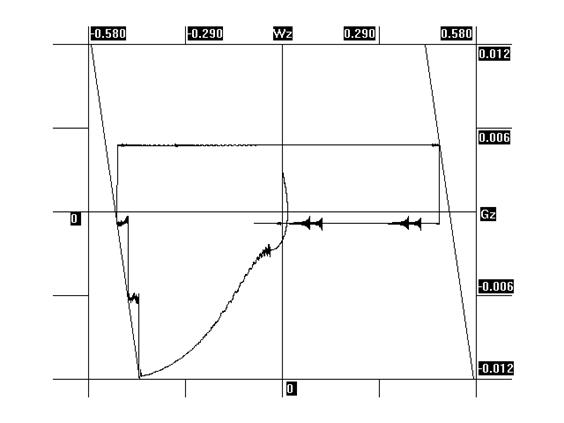
Рисунок Б.15 – Фазовый портрет, соответствующий процессу стабилизации с НУ 5-ого варианта табл. 5.1 в канале Z.
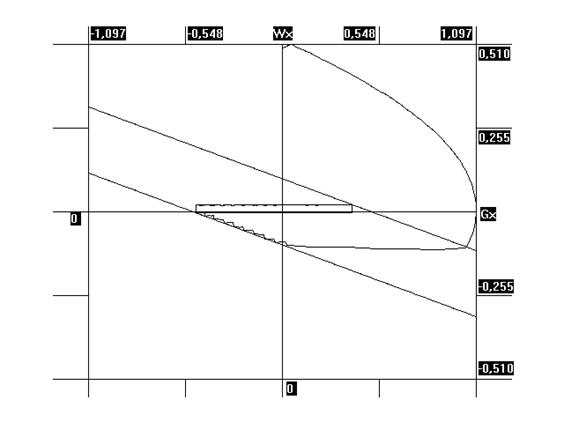
Рисунок Б.16 – Фазовый портрет, соответствующий процессу стабилизации с НУ 6-ого варианта табл. 5.1 в канале X.
Продолжение ПРИЛОЖЕНИЯ Б
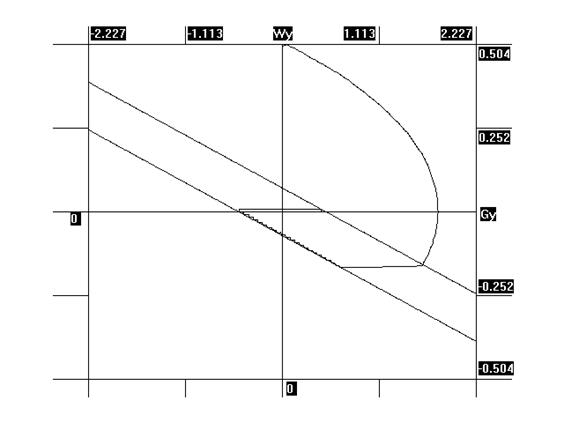
Рисунок Б.17 – Фазовый портрет, соответствующий процессу стабилизации с НУ 6-ого варианта табл. 5.1 в канале Y.
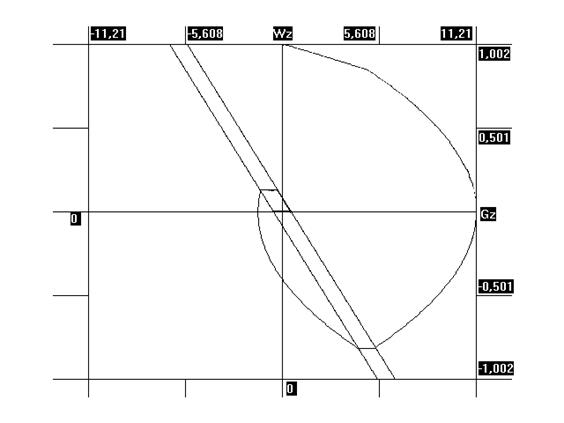
Рисунок Б.18 – Фазовый портрет, соответствующий процессу стабилизации с НУ 6-ого варианта табл. 5.1 в канале Z.
ПРИЛОЖЕНИЕ В
Результаты моделирования
Начальные условия результатов моделирования заданы в табл. 5.4
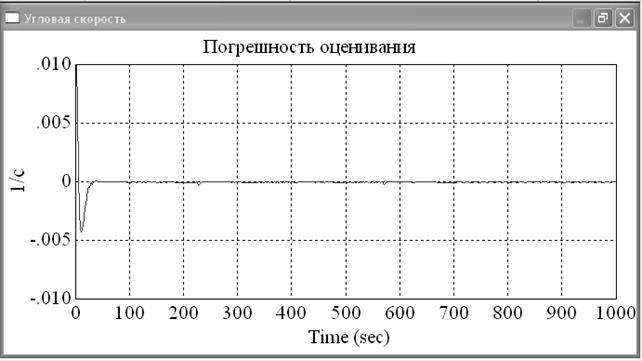
Рисунок В.1 – Погрешность оценивания, для 1-ого набора коэффициентов табл. 5.2
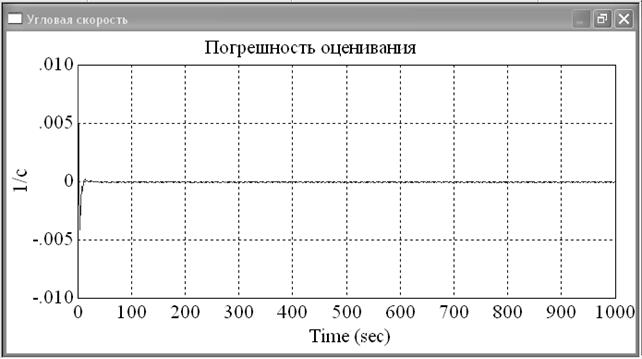
Рисунок В.2 – Погрешность оценивания, для 2-ого набора коэффициентов табл. 5.2
Продолжение ПРИЛОЖЕНИЯ В
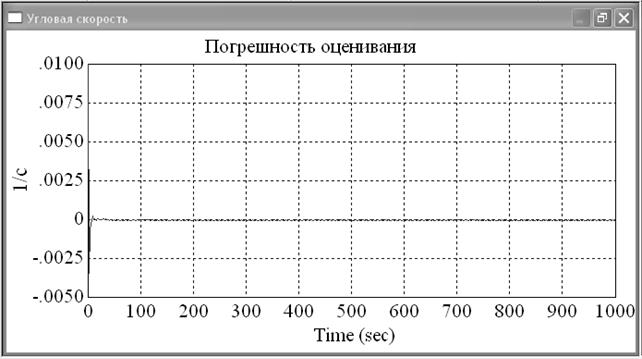
Рисунок В.3 – Погрешность оценивания, для 3-ого набора коэффициентов табл. 5.2
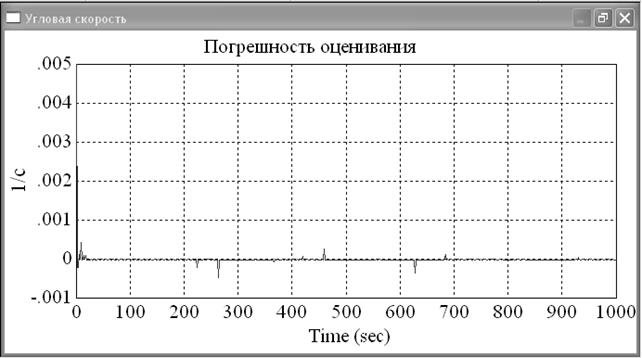
Рисунок В.4 – Погрешность оценивания, для 4-ого набора коэффициентов табл. 5.2
ПРИЛОЖЕНИЕ Г
Результаты моделирования
Начальные условия результатов моделирования заданы в табл. 5.3
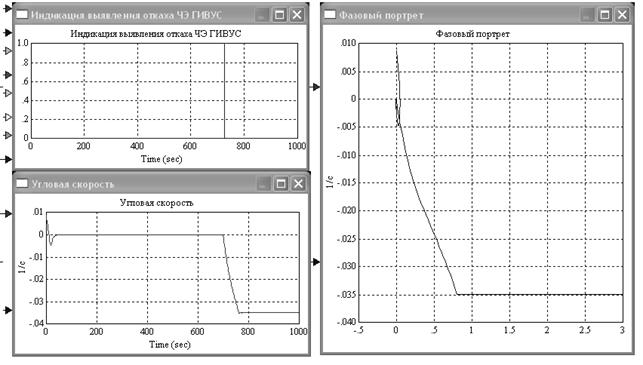
Рисунок Г.1 – диагностика отказа 2-огго типа 1-ого ЧЭ. 1-ый вариант НУ табл 5.3
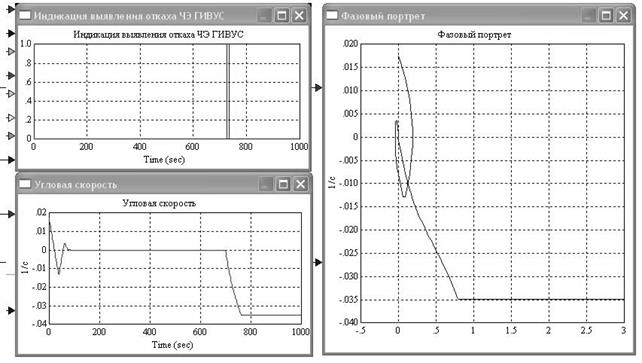
Рисунок Г.2 – диагностика отказа 2-огго типа 1-ого ЧЭ. 2-ой вариант НУ табл 5.3
Продолжение ПРИЛОЖЕНИЯ Г
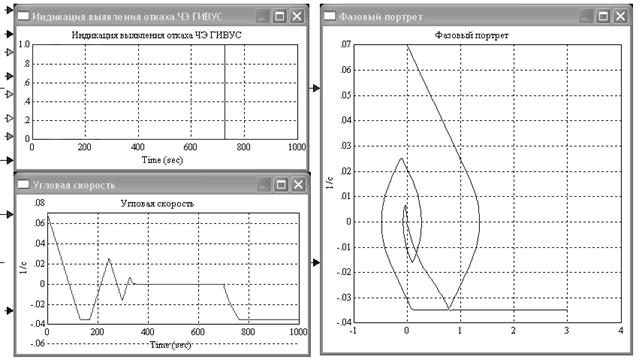
Рисунок Г.3 – диагностика отказа 2-огго типа 1-ого ЧЭ. 3-ий вариант НУ табл 5.3
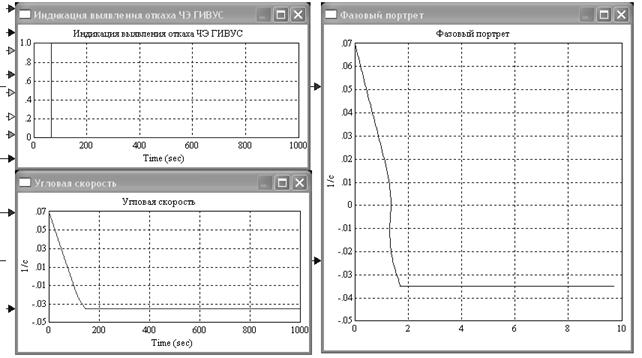
Рисунок Г.4 – диагностика отказа 2-огго типа 1-ого ЧЭ. 4-ый вариант НУ табл 5.3
Продолжение ПРИЛОЖЕНИЯ Г
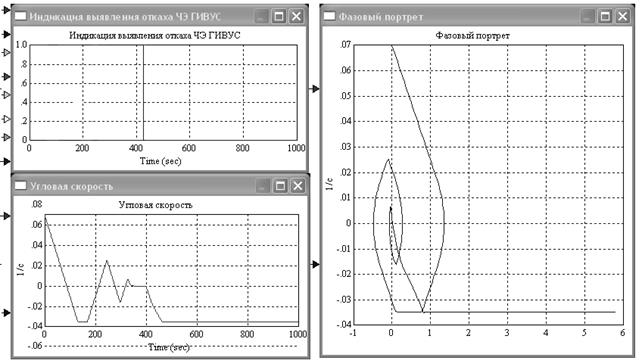
Рисунок Г.5 – диагностика отказа 2-огго типа 1-ого ЧЭ. 5-ый вариант НУ табл 5.3
ПРИЛОЖЕНИЕ Д
Результаты моделирования
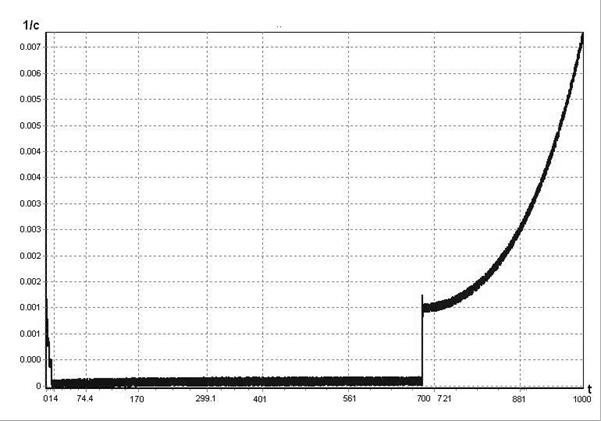
Рисунок Д.1 – Зависимость угловой скорости от времени при НУ 1-ого варианта табл 5.5
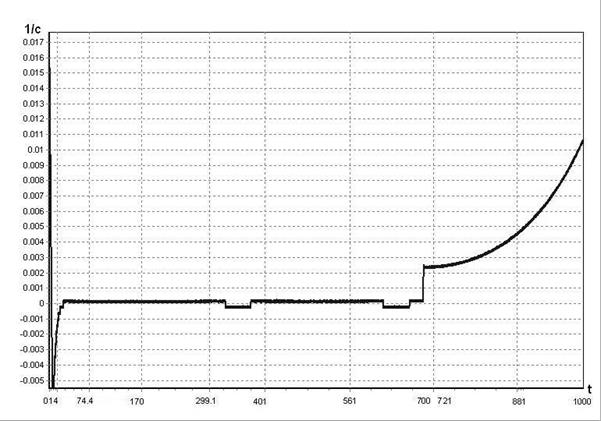
Рис. 4.2 – Зависимость угловой скорости от времени при НУ 4-ого варианта табл 5.5
Продолжение ПРИЛОЖЕНИЕ Д
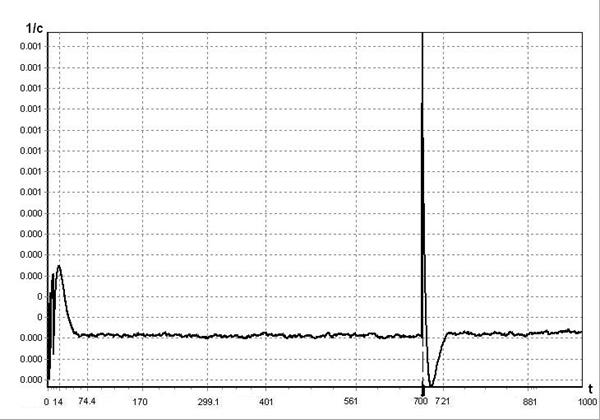
Рисунок Д.3 – Погрешность оценивания угловой скорости от времени при НУ 1-ого варианта табл 5.5. Пунктиром выделен момент выявления отказа ДС.
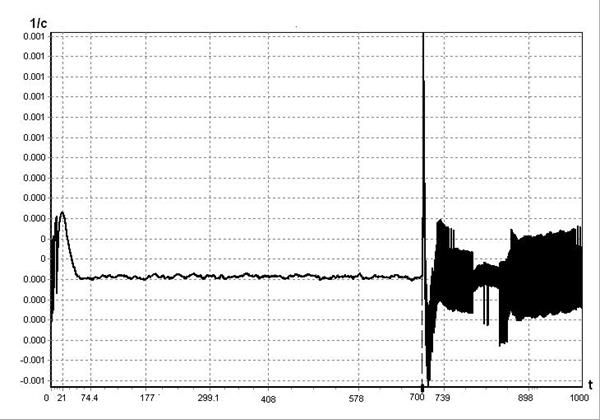
Рисунок Д.4 – Погрешность оценивания угловой скорости от времени при НУ 2-ого варианта табл 5.5. Пунктиром выделен момент выявления отказа ДС.
Продолжение ПРИЛОЖЕНИЕ Д
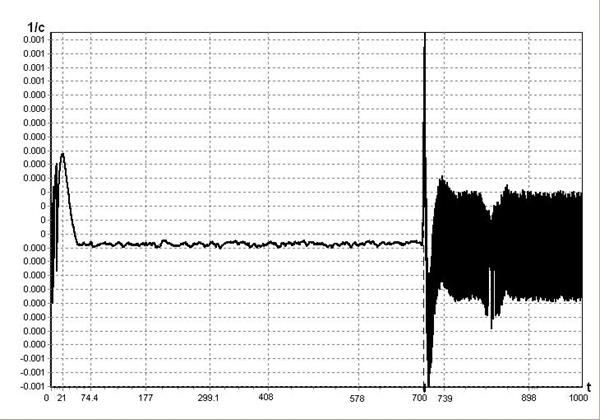
Рисунок Д.5 – Погрешность оценивания угловой скорости от времени при НУ 3-ого варианта табл 5.5. Пунктиром выделен момент выявления отказа ДС.
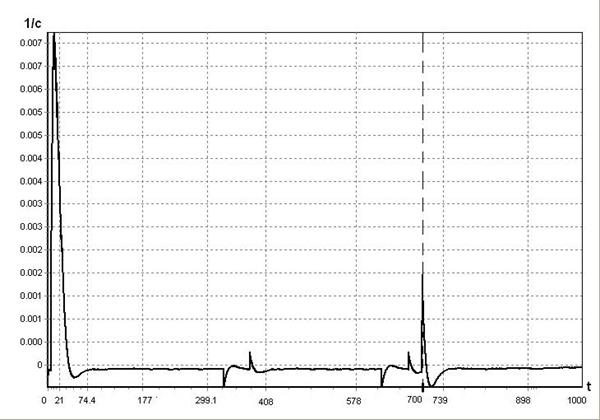
Рисунок Д.6 – Погрешность оценивания угловой скорости от времени при НУ 4-ого варианта табл 5.5. Пунктиром выделен момент выявления отказа ДС.
Продолжение ПРИЛОЖЕНИЕ Д
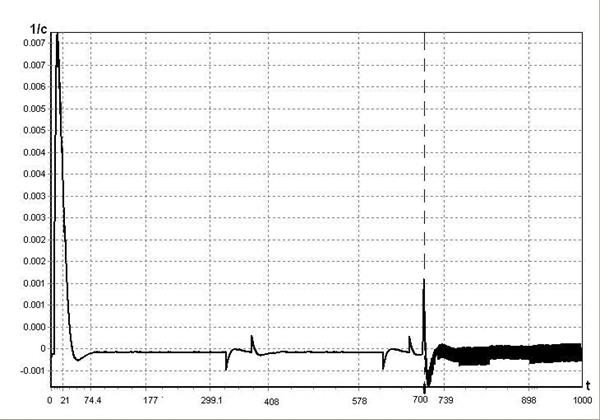
Рисунок Д.7 – Погрешность оценивания угловой скорости от времени при НУ 5-ого варианта табл 5.5. Пунктиром выделен момент выявления отказа ДС.
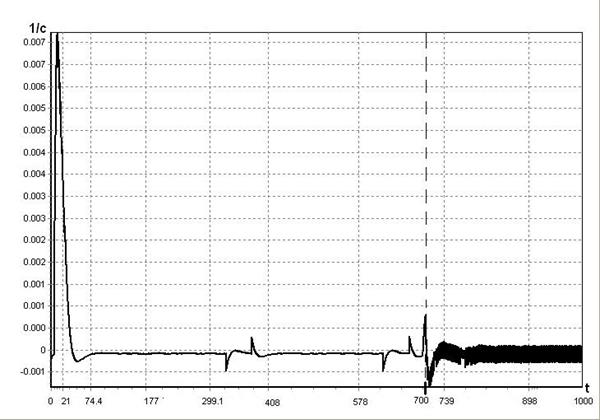
Рисунок Д.8 – Погрешность оценивания угловой скорости от времени при НУ 6-ого варианта табл 5.5. Пунктиром выделен момент выявления отказа ДС.
Продолжение ПРИЛОЖЕНИЕ Д
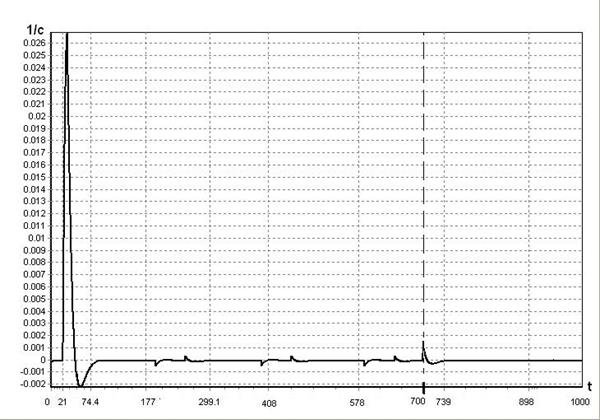
Рисунок Д.9 – Погрешность оценивания угловой скорости от времени при НУ 7-ого варианта табл 5.5. Пунктиром выделен момент выявления отказа ДС.
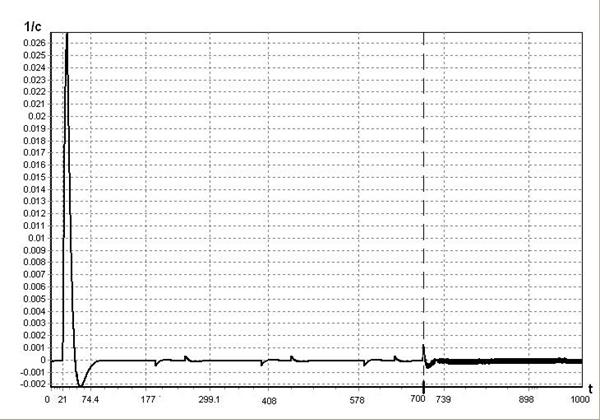
Рисунок Д.10 – Погрешность оценивания угловой скорости от времени при НУ
8-ого варианта табл 5.5. Пунктиром выделен момент выявления отказа ДС.
Продолжение ПРИЛОЖЕНИЕ Д
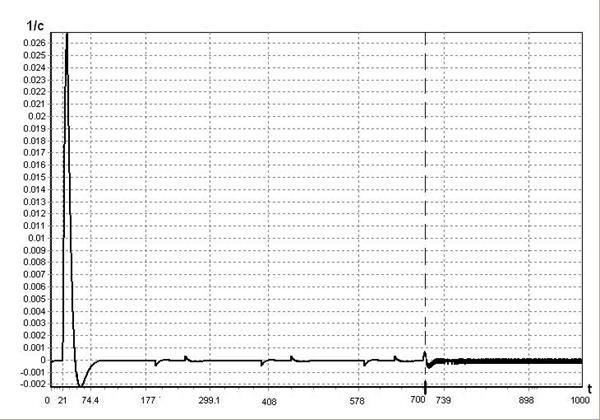
Рисунок Д.11 – Погрешность оценивания угловой скорости от времени при НУ
9-ого варианта табл 5.5. Пунктиром выделен момент выявления отказа ДС.
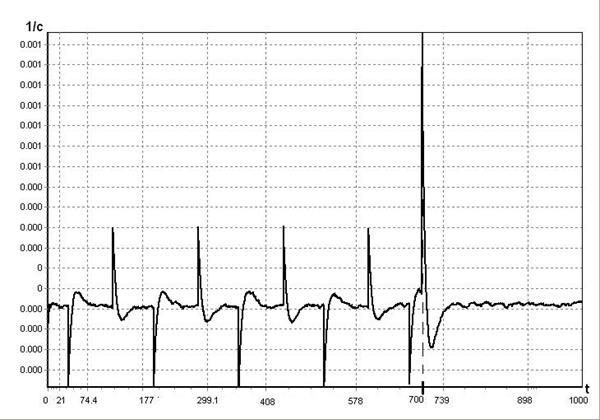
Рисунок Д.12 – Погрешность оценивания угловой скорости от времени при НУ
10-ого варианта табл 5.5. Пунктиром выделен момент выявления отказа ДС.
Продолжение ПРИЛОЖЕНИЕ Д
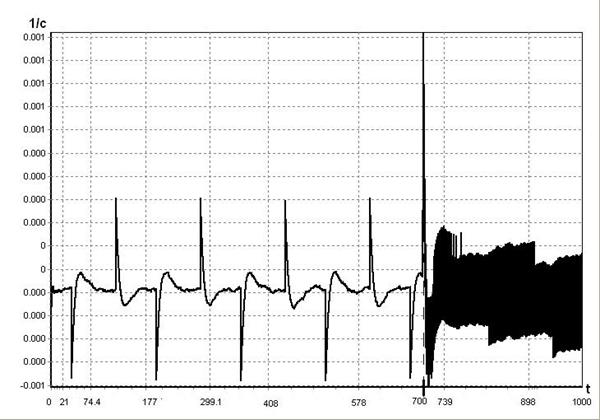
Рисунок Д.13 – Погрешность оценивания угловой скорости от времени при НУ
11-ого варианта табл 5.5. Пунктиром выделен момент выявления отказа ДС.
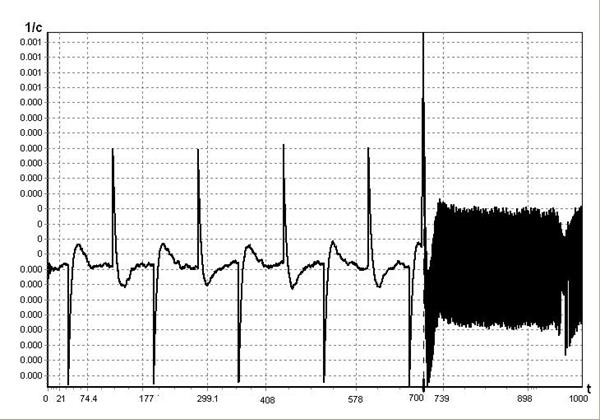
Рисунок Д.14 – Погрешность оценивания угловой скорости от времени при НУ
12-ого варианта табл 5.5. Пунктиром выделен момент выявления отказа ДС.
Продолжение ПРИЛОЖЕНИЕ Д

Рисунок Д.15 – Погрешность оценивания угловой скорости от времени при НУ
13-ого варианта табл 5.5. Пунктиром выделен момент выявления отказа ДС.
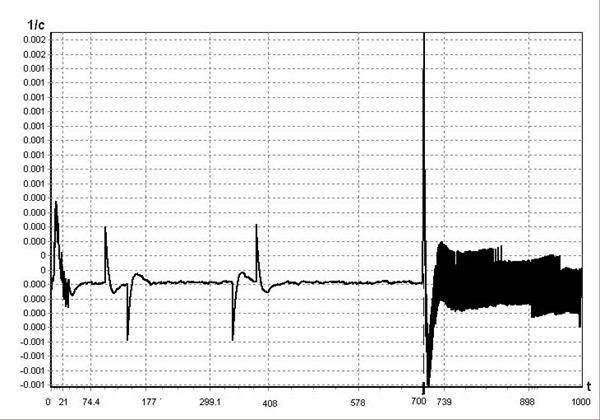
Рисунок Д.16 – Погрешность оценивания угловой скорости от времени при НУ
14-ого варианта табл 5.5. Пунктиром выделен момент выявления отказа ДС.
Продолжение ПРИЛОЖЕНИЕ Д
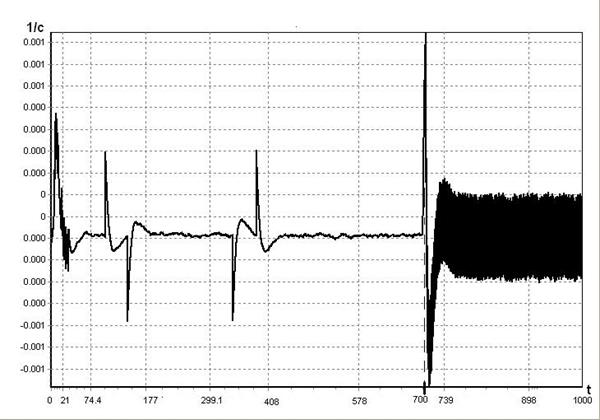
Рисунок Д.17 – Погрешность оценивания угловой скорости от времени при НУ
15-ого варианта табл 5.5. Пунктиром выделен момент выявления отказа ДС.
Дата: 2019-05-28, просмотров: 343.