Возьмем для рассмотрения космический аппарат, как абсолютно твердое тело, не содержащих каких-либо движущих масс (см. рис. 1.1) [1].
Если триэдр жестко связанных с телом осей Oxyz с началом координат в центре масс КА (связанная система координат - ССК) направить так, чтобы они совпали с главными центральными осями инерции, то центробежные моменты инерции обратятся в нуль и система уравнений Эйлера, описывающая динамику вращения КА вокруг центра масс, примет вид (3.1) [1, 3]:
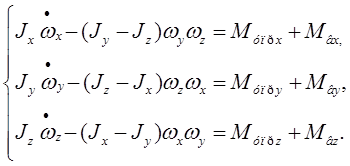 (3.1)
(3.1)
где  ,
,  ,
,  – проекции вектора абсолютной угловой скорости тела на оси
– проекции вектора абсолютной угловой скорости тела на оси
Ox,Oy и Oz соответственно.
 ,
,  ,
,  – проекции главного момента М на оси Ox,Oy и Oz соответственно.
– проекции главного момента М на оси Ox,Oy и Oz соответственно.
 ,
,  и
и  - моменты инерции тела относительно тех же осей.
- моменты инерции тела относительно тех же осей.
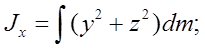
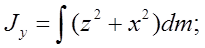 (3.2)
(3.2)
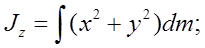
В приведенных выражениях (3.2) x,y,z – координаты элементарной массы тела, а интегралы берутся по всей массе твердого тела. Космическим аппаратом целесообразней управлять вокруг ССК [1, 3, 4].
Воспользуемся гироскопическим измерителем вектора угловой скорости и рассмотрим режим построения базовой ориентации с произвольными начальными условиями [1]. Командные приборы и исполнительные органы устанавливаем с учетом главных центральных осей инерции, таким образом, что управление вокруг трех взаимно перпендикулярных осей Ox, Oy, Oz - независимо.
Наряду с динамическими уравнениями рассматриваются кинематические уравнения, связывающие угловые скорости w j с углами поворота триэдра осей Oxyz относительно триэдра осей некоторой базовой системы координат (БСК) [1, 3], начало которой совпадает с началом координат ССК, а оси определенным образом ориентированы в инерциальном пространстве и движутся поступательно.
Пусть углы ориентации (углы Эйлера-Крылова)  – полностью определяют угловое положение ССК относительно БСК. Понятие углов ориентации становится однозначным лишь после того, как введена последовательность поворотов твердого тела вокруг осей Ox, Oy, Oz. Для последовательности поворотов:
– полностью определяют угловое положение ССК относительно БСК. Понятие углов ориентации становится однозначным лишь после того, как введена последовательность поворотов твердого тела вокруг осей Ox, Oy, Oz. Для последовательности поворотов:  система кинематических уравнений имеет вид [1, 4, 5, 23]:
система кинематических уравнений имеет вид [1, 4, 5, 23]:
(3.3)
Системы (3.1) и (3.3) описывают угловое движение твердого тела относительно БСК. Будем предполагать, что углы Эйлера-Крылова j j малы. Текущие значения w j оцениваются в системе по информации измерителя угловой скорости, измеряющего интегралы от проекций вектора абсолютной угловой скорости КА на оси чувствительности прибора [21].
Известны также некоторые другие методы [1, 4, 23] описания конечного поворота твердого тела не тремя, а четырьмя параметрами: исследование параметров Родрига-Гамильтона, Кейли-Клейна, или с использованием кватернионов [1, 3, 6].
Интегрируя кинематические уравнения (3.3) в бортовой цифровой вычислительной машине (БЦВМ) при начальных значениях углов  , и интегрируя уравнения движения центра масс КА при соответствующих начальных условиях, реализуют бесплатформенную инерциальную навигационную систему (БИНС). Таким образом, считаем, что текущие величины углов j j непрерывно вычисляются в БИНС [9, 12].
, и интегрируя уравнения движения центра масс КА при соответствующих начальных условиях, реализуют бесплатформенную инерциальную навигационную систему (БИНС). Таким образом, считаем, что текущие величины углов j j непрерывно вычисляются в БИНС [9, 12].
Характерной особенностью момента управления  является активность, он появляется в результате включения вспомогательных органов (в частности реактивных двигателей стабилизации), и исчезает при их отключении. Момент Мупрj формируется в соответствии с логикой закона управления и обеспечивает заданное угловое положение КА [1, 8, 10].
является активность, он появляется в результате включения вспомогательных органов (в частности реактивных двигателей стабилизации), и исчезает при их отключении. Момент Мупрj формируется в соответствии с логикой закона управления и обеспечивает заданное угловое положение КА [1, 8, 10].
Источником внешнего возмущающего момента Мвj, является взаимодействие КА с внешней средой, приводящее к появлению действующих на корпус внешних сил – гравитационного, аэродинамического, светового, магнитного [1, 3, 10, 12]. Момент  имеет две составляющих –
имеет две составляющих –  (создаваемую реактивными двигателями), и
(создаваемую реактивными двигателями), и  (создаваемым моментным магнитоприводом и др. Будем рассматривать только ) [1].
(создаваемым моментным магнитоприводом и др. Будем рассматривать только ) [1].
Важным свойством динамической системы ориентации является: если осями ориентации являются поступательно движущиеся оси, то при соответствующем законе управления вместо сложных пространственных поворотов космического аппарата можно изучать три независимых плоских угловых движения, что мы и сделаем в системе, т.е.:
 (3.4)
(3.4)
получено три независимых уравнения.
Закон управления формируется путем сложения позиционного сигнала j j и скоростного сигнала w j, умноженного на коэффициент усиления kj (j= x, y, z):
 . (3.5)
. (3.5)
Усложним рассматриваемую модель. Для этого будем рассматривать ее как упругое тело [1, 3, 6-12]. Уравнения осцилляторов для упругой модели имеет вид:
 (3.6)
(3.6)
где  - коэффициент демпфирования для каждой отдельно взятой гармоники.
- коэффициент демпфирования для каждой отдельно взятой гармоники.
 - квадрат собственной частоты не демпфированных колебаний для каждой гармоники.
- квадрат собственной частоты не демпфированных колебаний для каждой гармоники.
 - управляющий момент с учетом возможного отказа. i = 1,2,3,4. Коэффициенты
- управляющий момент с учетом возможного отказа. i = 1,2,3,4. Коэффициенты 

 мы берем из таблицы, приведенной в приложении А.
мы берем из таблицы, приведенной в приложении А.
При нулевой правой части, мы получаем свободные колебания, зависящие от начальных отклонений, угловых скоростей и др. При ненулевой правой части мы получаем вынужденные колебания, которые накладываются на свободные колебания. Они являются затухающими со временем, в силу коэффициента демпфирования. Прототипом для данной упругой модели послужил маятник на пружинке. Рассматриваемая система является линейной [1].
Дата: 2019-05-28, просмотров: 337.