Аэродинамический момент
Взаимодействие корпуса [1, 3] движущегося с большой скоростью космического аппарата с разряженной атмосферой больших высот вызывает появление аэродинамических сил и моментов. Первые приводят главным образом к постепенному торможению космического аппарата и связанного с этим эволюции его орбиты, в конечном итоге приводящей к падению на поверхность планеты ее искусственных спутников. А вторые к появлению внешних моментов, иногда благотворно, а чаще неблаготворно сказывающихся на режимах ориентации.
Особенностью аэродинамического взаимодействия корпуса космического аппарата с внешней средой [1, 3] является то, что вследствие малой плотности среды длина свободного пробега молекул атмосферы не может считаться малой по сравнению с характерными линейными размерами корпуса космического аппарата. В результате соударение "отскочившей" от поверхности космического аппарата молекулы внешней среды с другой такой молекулой происходит на большом удалении от него, что позволяет считать, что каждая молекула атмосферы взаимодействует с корпусом космического аппарата независимо от других. Это приводит не к обычной в аэродинамике схеме обтекания тела сплошной среды, а к картине "бомбардировки" такого тела отдельными молекулами.
Взаимодействие молекул разряженной среды с поверхностью твердого тела мыслимо идеализировать двояким образом: либо как упругое соударение с мгновенным зеркальным отражением молекулы, либо считать, что при соударении молекула отдает всю свою энергию телу, приходит с ним в температурное равновесие, а затем выходит во внешнее пространство с тепловой скоростью. Поскольку тепловая скорость молекулы невелика по сравнению со скоростью движения космического аппарата, последнюю схему можно считать схемой абсолютно упругого удара. Вторая из приведенных схем значительно лучше описывает наблюдаемые на практике явления и поэтому кладется в основу расчетов. Однако фактически происходят как упругие, так и неупругие соударения, и в более тонких расчетах следует учитывать долю тех и других [1, 3, 6].
Если по аналогии с обычной аэродинамикой считать, что возникающие силы взаимодействия тела и среды пропорциональны скоростному напору
 ; (3.7)
; (3.7)
где  - плотность внешней среды,
- плотность внешней среды,  - относительная скорость тела и среды, то элементарная сила, действующая на площадку dS, будет:
- относительная скорость тела и среды, то элементарная сила, действующая на площадку dS, будет:
 ; (3.8)
; (3.8)
здесь  - некоторый коэффициент, а
- некоторый коэффициент, а  - угол между внешней нормалью к элементарной площадке dS и вектором скорости этой площадки относительно внешней среды. Написанное соотношение является следствием закона сохранения импульса, и легко убедиться, что для абсолютно неупругого удара с=2.
- угол между внешней нормалью к элементарной площадке dS и вектором скорости этой площадки относительно внешней среды. Написанное соотношение является следствием закона сохранения импульса, и легко убедиться, что для абсолютно неупругого удара с=2.
Элементарный аэродинамический момент относительно центра масс
 ; (3.9)
; (3.9)
где r — радиус-вектор площадки dS, имеющий начало в центре масс тела, а полный момент
 ; (3.10)
; (3.10)
В последнем выражении интегрирование производится по той части поверхности космического аппарата S, которая омывается внешней средой при его движении. Входящая в (3.8), а, следовательно, и в (3.10) скорость V, строго говоря, складывается из скорости движения центра масс  и линейных скоростей элемянтарных площадок внешней поверхности корпуса космического аппарата, связанных с его вращением вокруг центра масс. Первое слагаемое
и линейных скоростей элемянтарных площадок внешней поверхности корпуса космического аппарата, связанных с его вращением вокруг центра масс. Первое слагаемое  , связанное с
, связанное с  , будет, поэтому функцией конфигурации омываемой части корпуса, а, следовательно, функцией конфигурации внешней поверхности космического аппарата и его положения относительно вектора скорости . Второе слагаемое, кроме того, будет являться функцией угловой скорости космического аппарата. Сравнение модуля скорости
, будет, поэтому функцией конфигурации омываемой части корпуса, а, следовательно, функцией конфигурации внешней поверхности космического аппарата и его положения относительно вектора скорости . Второе слагаемое, кроме того, будет являться функцией угловой скорости космического аппарата. Сравнение модуля скорости  с наибольшим возможным значением модуля линейной скорости внешней поверхности космического аппарата, порожденной его вращением вокруг центра масс, показывает, что вторым слагаемым в задачах активной ориентации космических аппаратов можно пренебрегать [1 ,3, 12]. Это связано как с очень малыми угловыми скоростями, так и с относительно небольшими размерами современных космических аппаратов. Поэтому всюду будет делаться предположение о равенстве нулю внешнего аэродинамического момента, связанного с вращением космического аппарата вокруг его центра масс. В этой же связи скорость V в выражении (3.8) может быть определена равенством
с наибольшим возможным значением модуля линейной скорости внешней поверхности космического аппарата, порожденной его вращением вокруг центра масс, показывает, что вторым слагаемым в задачах активной ориентации космических аппаратов можно пренебрегать [1 ,3, 12]. Это связано как с очень малыми угловыми скоростями, так и с относительно небольшими размерами современных космических аппаратов. Поэтому всюду будет делаться предположение о равенстве нулю внешнего аэродинамического момента, связанного с вращением космического аппарата вокруг его центра масс. В этой же связи скорость V в выражении (3.8) может быть определена равенством  .
.
 Пусть космический аппарат имеет форму сферы, тогда численное значение аэродинамического момента действующего на сферу, и при
Пусть космический аппарат имеет форму сферы, тогда численное значение аэродинамического момента действующего на сферу, и при  будет равно
будет равно
 (3.11)
(3.11)
Полученное выражение говорит о том, что при поворотах вокруг центра масс космический аппарат сферической формы имеет два положения равновесия, соответствующие  и
и  . Если направление отсчета расположения центра давления относительно центра масс взять по направлению вектора
. Если направление отсчета расположения центра давления относительно центра масс взять по направлению вектора  , то первое положение равновесия характеризуется расположением центра масс за центром сферы (задняя центровка), а второе расположением центра масс перед центром сферы (передняя центровка). Рассматривая изменение аэродинамического момента в функции угла
, то первое положение равновесия характеризуется расположением центра масс за центром сферы (задняя центровка), а второе расположением центра масс перед центром сферы (передняя центровка). Рассматривая изменение аэродинамического момента в функции угла  в окрестности положения равновесия, можно написать [8]:
в окрестности положения равновесия, можно написать [8]:
 ; (3.12)
; (3.12)
Это даст для задней центровки  , а для передней
, а для передней  . Знаки приведенных производных говорят о том, что при задней центровке
. Знаки приведенных производных говорят о том, что при задней центровке  космический аппарат статически неустойчив (возникающий момент имеет тот же знак, что и отклонение), а при передней центровке
космический аппарат статически неустойчив (возникающий момент имеет тот же знак, что и отклонение), а при передней центровке  — устойчив.
— устойчив.
Это указывает на основную закономерность, характерную для аэродинамических моментов, возникающих при космическом полете: возникновение моментов связано с силами сопротивления и зависит от расположения линий действия этих сил относительно центра масс. При более сложных конфигурациях космических аппаратов расчет заметно усложняется, приходится учитывать взаимное затенение элементов конструкции, переменность (зависимость от угла поворота) омываемой потоком поверхности S и т.п. Однако и в этих громоздких расчетах фактически сохраняется приведенная методика. Результаты подобных расчетов, как правило, представляются в виде зависимостей аэродинамических коэффициентов моментов от соответствующих углов, характеризующих положение тела относительно вектора скорости центра масс [1, 3, 8].
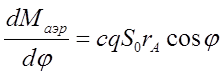
Формула (3.12) указывает на зависимость аэродинамического момента от положения центра масс на прямой ОА. В условиях невозмущенного движения внешние моменты должны быть полностью уравновешены. В рассматриваемом случае это означает, что угол  должен быть равен нулю, т. е. линия ОА должна быть параллельной вектору скорости. Если считать, что происходит ориентация в скоростных осях, то естественно направить ось Ох космического аппарата по прямой OA, тогда при идеальной ориентации жестко связанная с корпусом космического аппарата ось Ох будет совпадать по направлению с вектором , и вследствие равенства нулю угла
должен быть равен нулю, т. е. линия ОА должна быть параллельной вектору скорости. Если считать, что происходит ориентация в скоростных осях, то естественно направить ось Ох космического аппарата по прямой OA, тогда при идеальной ориентации жестко связанная с корпусом космического аппарата ось Ох будет совпадать по направлению с вектором , и вследствие равенства нулю угла  аэродинамический момент будет равен нулю [1. 3].
аэродинамический момент будет равен нулю [1. 3].
Таким образом, вопрос о величине аэродинамического момента и статической устойчивости оказывается связанным с расстоянием  взятым на оси Ох от центра масс до точки А. Точку приложения равнодействующей аэродинамических сил называют центром давления, и, следовательно, вектор определяет положение центра давления относительно центра масс. Для тела произвольной формы тоже можно ввести понятие центра давления как точки пересечения линий действия равнодействующих аэродинамических сил.
взятым на оси Ох от центра масс до точки А. Точку приложения равнодействующей аэродинамических сил называют центром давления, и, следовательно, вектор определяет положение центра давления относительно центра масс. Для тела произвольной формы тоже можно ввести понятие центра давления как точки пересечения линий действия равнодействующих аэродинамических сил.
Как уже говорилось, аэродинамические силы и моменты пропорциональны скоростному напору q (3.7). Поскольку скорость полета определяется законами небесной механики, постольку при изменении высоты полета на малую долю радиуса планеты скорость изменяется мало. В то же время известно, что плотность окружающей планету атмосферы чрезвычайно сильно зависит от высоты. Это позволяет утверждать, что величина q является для данного класса космических аппаратов (например, для искусственных спутников Земли, движущихся по почти круговым орбитам) главным образом функцией плотности среды  , т.е. в конечном итоге - высоты полета. Следовательно, для космических аппаратов, траектории которых достаточно удалены от планет, аэродинамические моменты будут пренебрежимо малы [1, 3, 10].
, т.е. в конечном итоге - высоты полета. Следовательно, для космических аппаратов, траектории которых достаточно удалены от планет, аэродинамические моменты будут пренебрежимо малы [1, 3, 10].
Для математического моделирования, будем рассматривать модель реального космического аппарата [10], с заданными линейными размерами.

 Солнечные батареи Корпус КА
Солнечные батареи Корпус КА
Рис. 3.1.
Рис. 3.2.
Исходя из выше представленной модели космического аппарата, аэродинамические моменты в каждом из каналов, можно представить в виде:

 (3.13).
(3.13).

3.2.1.1 Аппроксимация плотности земной атмосферы аналитическими зависимостями
Предполагается, что рассматриваемая модель упругого космического аппарата [1, 3, 10, 11] движется в атмосфере земли. Тогда на КА действуют моменты внешних сил, такие как гравитационный и аэродинамический моменты. Для нахождения аэродинамического момента, необходимо знать плотность атмосферы, которая зависит от высоты полета.
В данной задаче требуется [11, 24] аппроксимировать функцию полиномом 3-его порядка вида:
 ; (3.14)
; (3.14)
Полином (3.14) в каждом из узлов аппроксимации должен удовлетворять условию:
 ; (3.15)
; (3.15)
Таким образом, задача аппроксимации функции сводится к решению системы с N+1 уравнений с тремя неизвестными:
 ; (3.16)
; (3.16)
Это объясняется тем, что полином должен пройти через все N+1 точек (в данном случае это 25 точек) в которых задана функция x = x(t).
Метод наименьших квадратов позволяет такую систему привести к решаемой системе. Запишем функционал:
 .
.
Это достигается тогда, когда выполняется:
 ;
;
Взяв соответствующие производные, получим систему:
 ;
;
(3.17)
В отличии от системы (3.16) полученная система определена и имеет единственное решение [24].
В результате проведенных расчетов, для составления системы, были произведены расчеты, приводить которые нецелесообразно ввиду их громоздкости.
Подставив в систему (3.17) соответствующие значения, в результате мы получим систему. Эту систему будем решать методом Гаусса.
3.2.1.2 Построение аппроксимирующего полинома для плотности земной атмосферы
Воспользовавшись таблицей стандартной атмосферы [10,11], построим графики зависимостей от высоты функции Po(H):
Плотность:
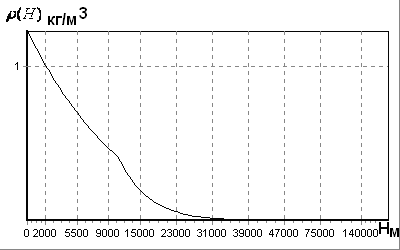
Рис. 3.3 - Зависимость плотности воздуха от высоты
Аппроксимирующий полином:

3.2.2 Гравитационный момент
В обычных задачах механики [1, 3, 6, 10, 11, 12], связанных с ее техническими приложениями, ускорения силы тяжести в различных точках материального тела считаются равными как по величине, так и по направлению. Это сразу приводит к известному положению о совпадении центра масс и центра тяжести материального тела и, как следствие, к равенству нулю момента гравитационных сил относительно центра масс. На самом деле векторы ускорения силы тяжести различных точках тела всегда различны, вследствие того, что все они направлены к центру Земли, а, следовательно, если рассматриваемые точки не лежат на одной прямой, проходящей через центр притяжения, то векторы параллельны, а если точки лежат на одной такой прямой, то – имеют различное удаление от центра притяжения и, значит, соответствующие ускорения отличаются по величине. Однако это уточнение в обычных задачах механики несущественно, поскольку размеры технических сооружений малы по сравнению с радиусом Земли, и поэтому вызванные сформулированным здесь уточненные моменты столь малы по сравнению с другими, что учет их не смысла.
Космический аппарат, движущийся по околоземной орбите [6], тоже мал по сравнению с расстоянием до центра притяжения планеты, однако он не подвержен (если не считать времени включения двигателей) действию больших внешних моментов, и поэтому пренебрежение малыми в обычной технике моментами (гравитационными, связанными со световым давлением и т. п.) уже не будет законным без соответствующей оценки этих моментов [1, 3].
Прежде, чем получить формулы для вычисления гравитационных моментов и обсудить некоторые следствия, вызванные существованием этих внешних моментов, поясним физическую сущность рассматриваемого явления па простейшем примере. Пусть в центральном ньютоновом поле сил находится тело, могущее быть представленным в виде двух одинаковых точечных масс, соединенных невесомым стержнем (идеализированная гантель), и пусть этот стержень будет наклонен на некоторый угол (отличный от 0 и pi/2) к линии, соединяющей его середину А с центром притяжения С (рис. 3.4).
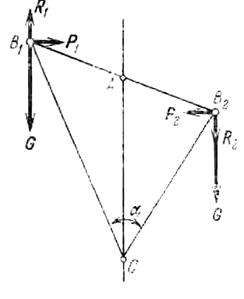
Рис. 3.4 – Тело в виде двух одинаковых точечных масс, соединенных невесомым стержнем (идеализированная гантель) в ньютоновом поле
Если принять обычные допущения о параллельности и равенстве сил тяжести) действующих на обе массы гантели (считаем, что на них действует ускорение силы тяжести, соответствующее точке А), то связанные с ними силы G не дали бы момента относительно точки А, являющейся центром масс рассматриваемого тела. На самом деле силы тяжести будут действовать по прямым В1С и В2С, а величина силы тяжести в точке И1 будет меньше, чем в точке И2, поскольку В1С > В2С. Поэтому к “обычным” силам G, вычисленным по вектору ускорения силы тяжести, соответствующему точке А, следует ввести поправки, например малые силы P1i и P2, изменяющие должным образом величины сил тяжести, действующий на материальные точки, и силы P1 и Р2, изменяющие должным образом направления этих сил тяжести. Из рисунка видно, что пара сил R1 и R2 и пара сил P1 и Р2 (их можно считать 'парами, постольку малые силы Р1 и Р2, а также R1 и R2 будут отличаться друг от друга на .величины высшего порядка малости) создают моменты одного знака, стремящиеся совместить ось тела B1B2 с исправлением АС.
Таким образом, как зависимость величины ускорения силы тяжести от расстояния до центра притяжения, так и центральность поля тяготения приводят к эффектам одного типа - к появлению моментов, стремящихся повернуть ось тела, связанную с геометрией распределения масс в нем, в некоторое определенное положение относительно прямой, соединяющей центр масс тела с центром притяжения.
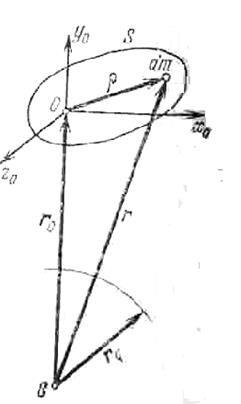
Рис. 3.5.
Найдем выражения, позволяющие вычислять составляющие вектора гравитационного момента Мгр, действующего на некоторое тело S [1, 3]. Введем связанную с телом правую систему координат ОXоYоZo с ортами i, j, k и началом в центре масс тела О, которая совпадает с орбитальной. Соответственно ось OYo натравим по продолжению радиуса-вектора, соединяющего центр притяжения С с началом О, а ось ОXo расположим в мгновенной орбитальной плоскости. Гравитационный момент, действующий на тело S, будет равен:
 ;
;
где p - радиус-вектор некоторой элементарной массы материального тела,
dG-вектор силы тяжести, действующей на эту элементарную массу. Очевидно, что
 .
.
Здесь g - ускорение силы тяжести на поверхности планеты, r – радиус-вектор элементарной массы dm относительно центра тяготения С, гg -удаление поверхности планеты от центра C. Введя еще r0 - радиус-вектор центра масс тела S относительно С, следовательно [3]:
 ;
;
где  - гравитационная постоянная для рассматриваемой планеты, равная
- гравитационная постоянная для рассматриваемой планеты, равная  .
.
Проекции гравитационного момента на оси триэдра ОXoYoZo, будут равны:
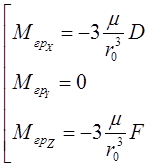 ; (3.18)
; (3.18)
где D и F-центробежные моменты инерции тела S, определяемые для системы
осей ОXоYоZo.
Полученные для гравитационного момента выражения говорят о том, что вектор этого момента всегда лежит в плоскости местного горизонта (перпендикулярен к местной вертикали СО) [1, 4, 10]. Кроме того, очевидно, что гравитационный момент для тела, главные центральные оси инерции которого в данное мгновение совпадают с орбитальными, равен нулю (так как в этом случае D=F=0), в частности он всегда равен нулю для тела, эллипсоид инерции которого является сферой.
В общем случае главные центральные оси инерции тела могут быть повернуты произвольным образом относительно орбитальных осей ориентации. Обозначим жестко связанный с телом S триэдр, совпадающий с главными центральными осями инерции, через Охуz, а для орбитальных осей сохраним обозначение OXoYoZo. Взаимное положение этих систем координат определим следующей таблицей направляющих косинусов:
 .
.
Найдем проекцию гравитационного момента на ось Ох. Очевидно, что
 . (3.19)
. (3.19)
Воспользовавшись свойством направляющих косинусов, преобразуем равенство (3.19) с учетом формул (3.18):
 ; (3.20)
; (3.20)
поскольку триэдр Oxyz совпадает с главными центральными осями инерции, постольку все центробежные моменты инерции в этих осях будут равны нулю, и выражение (3.20) может быть упрощено [1, 3]. Проделав аналогичные выкладки для нахождения проекций гравитационного момента можно, написать:
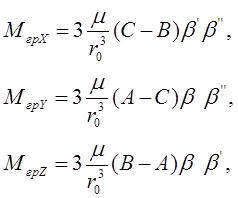 (3.21)
(3.21)
Таким образом, гравитационный момент, действующий вокруг одной из осей триэдра Oxyz, зависит от разности моментов инерции относительно двух других осей. Чтобы сделать анализ полученных выражений более наглядным, рассмотрим гравитационный момент, действующий на тело S, при условии, что оси 0Z и 0Zo совпадают. Это соответствует повороту тела S, который можно назвать поворотом по тангажу, на угол  (рис. 3.6).
(рис. 3.6).
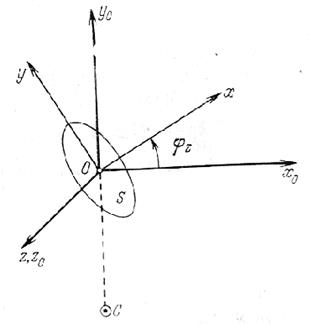
Рис. 3.6 - Поворот тела вокруг оси Z
При сделанных предположениях
 ,
, 
 ;
;
н, следовательно,


 ;
;
Как и надо было ожидать, при  гравитационный момент обращается в нуль, поскольку триэдры Охуz и 0XoYoZo в этом случае совпадают [1, 3]. При монотонном увеличении
гравитационный момент обращается в нуль, поскольку триэдры Охуz и 0XoYoZo в этом случае совпадают [1, 3]. При монотонном увеличении  от гравитационный момент возрастает, достигает максимума при
от гравитационный момент возрастает, достигает максимума при  , затем убывает и вновь становится равным нулю при
, затем убывает и вновь становится равным нулю при  . Таким образом, существует два положения равновесия: при
. Таким образом, существует два положения равновесия: при  и при
и при  . Однако, из этих положений одно соответствует статической устойчивости (при малом изменении
. Однако, из этих положений одно соответствует статической устойчивости (при малом изменении  , возникает момент противоположного знака), другое – статистической неустойчивости. Действительно, производная
, возникает момент противоположного знака), другое – статистической неустойчивости. Действительно, производная
 ;
;
при и при имеет разные знаки. Какое из этих двух положений соответствует статистической устойчивости, зависит от знака (B-A) [1, 3, 8]. Условие устойчивости (возникновение восстанавливающего момента при малом отклонении)  реализуется при
реализуется при  для A>B или при
для A>B или при  для B>A, т.е. в обоих случаях вытянутая ось тела должна занимать вертикальное положение.
для B>A, т.е. в обоих случаях вытянутая ось тела должна занимать вертикальное положение.
Таким образом, вытянутое в вертикальном положении тело, обладая статистической устойчивостью по тангажу и крену, является нейтральным по отношению к углу рыскания [1, 3, 4].
3.3 Гироскопический измеритель угловой скорости
Для пересчета векторов сил, моментов и т.д. из одной системы координат в другую необходимо вычислить матрицу перехода, элементами которой являются косинусы углов между осями исходной и повернутой систем координат [1, 3, 21]. Эта матрица определяется последовательностью углов поворота, которые позволяют перейти от одной системы координат к другой. Осуществление такого рода перехода требует не более трех поворотов исходной системы координат. Выбор последовательности углов поворота обычно определяется физическим содержанием задачи [1, 3, 5]. Это могут быть углы, измеренные с помощью приборов системы управления, от которых зависят аэродинамические и другие нагрузки на ЛА и т.д. [1]
Применение направляющих косинусов в космических приложениях обусловлено, прежде всего, тем, что они могут быть непосредственно измерены на борту космического аппарата [5].
1. Сформируем матрицу dA [3,3] – переход от ССК к ПСК ГИВУС:
| ССК | ||||
| ПСК | x | y | z | |
| x | d[1,1] | d[1,2] | d[1,3] | |
| y | d[2,1] | d[2,2] | d[2,3] | |
| z | d[3,1] | d[3,2] | d[3,3] | |
|
Матрица dА получается вследствие трех элементарных поворотов:
1) вокруг оси х на ÐАД(1):

Рис.3.7 - Схема поворота первого типа вокруг оси х
Матрица направляющих косинусов:
 ;
;
2) вокруг оси y на ÐАД(2):
|

Матрица направляющих косинусов:
 ;
;
3) вокруг оси z на ÐАД(3):

Рис. 3.9 - Схема поворота третьего типа вокруг оси z
Матрица направляющих косинусов:
 ;
;

Так как  , то :
, то :
 .
.
2. Сформируем матрицу dw [6,3] – переход от ПСК ГИВУС к ЧЭ:
| ПСК | |||
| оси | x | y | z |
| 1 | dw[1,1] | dw[1,2] | dw[1,3] |
| 2 | dw[2,1] | dw[2,2] | dw[2,3] |
| 3 | dw[3,1] | dw[3,2] | dw[3,3] |
| 4 | dw[4,1] | dw[4,2] | dw[4,3] |
| 5 | dw[5,1] | dw[5,2] | dw[5,3] |
| 6 | dw[6,1] | dw[6,2] | dw[6,3] |
 (
(  )
)
3. Сформируем матрицу dAm[3,3] погрешностей установки ГИВУС в ССК:
 .
.
Матрица dАm получается, если предположить что 
4. Сформируем матрицу DS[6,3] - переход от CСК к ЧЭ:
DS=dw*dA*dADm.
5. Определяется время точностной готовности MGOT.
6. Вычислим угловой уход.

где a[k] – угол ухода;
apr[k] – значение угла ухода, соответствующее предыдущему такту;
wt - паспортизируемый уход;
dwt - погрешность паспортизации;
 - математическое ожидание;
- математическое ожидание;
 - среднеквадратичное отклонение случайного ухода;
- среднеквадратичное отклонение случайного ухода;
NORM(  ) – случайная составляющая, отвечающая нормальному закону распределения.
) – случайная составляющая, отвечающая нормальному закону распределения.
7. Приведем измеренный сигнал к осям ЧЭ:
 ,
,
где  - угол поворота объекта, приведенный к осям ЧЭ (вектор,
- угол поворота объекта, приведенный к осям ЧЭ (вектор,  );
);
 - угол поворота объекта.
- угол поворота объекта.
8. Учет углового ухода, шума измерений и переходного процесса при достижении готовности ЧЭ [21]:

где b[k] – интеграл, измеренный ЧЭ;
bpr[k] - интеграл, измеренный ЧЭ на предыдущем такте;
BSH[k] – «белый шум», распределенный по нормальному закону;
BSTR[k] – шум, создаваемый системой термостатирования;
АPER – величина помехи в переходном процессе;
MGOT – время готовности;
NGOT – счетчик готовности k-го ЧЭ.
 .
.
9. Определим число импульсов [6, 10, 14].
Для k=1...6:

где U[k] – промежуточная переменная;
 - сумма импульсов k-го ЧЭ за все такты;
- сумма импульсов k-го ЧЭ за все такты;
 - промежуточное значение цены импульсов;
- промежуточное значение цены импульсов;
 - промежуточное значение погрешности цены импульсов.
- промежуточное значение погрешности цены импульсов.

где  - сумма импульсов k-го ЧЭ за такт;
- сумма импульсов k-го ЧЭ за такт;
Ent{…} – операция выделения целой части.
 .
.
4 АЛГОРИТМЫ ОБРАБОТКИ ИНФОРМАЦИИ И КОНТРОЛЯ СУО И СТАБИЛИЗАЦИИ КА
4.1 Синтез наблюдателя Льюинбергера
Рассмотрим объект, описываемый уравнениями [7, 22]:
 (4.1)
(4.1)
 (4.2)
(4.2)
где х – n-мерный вектор состояния;
u – m-мерный вектор детерминированных (доступных измерению) входных сигналов;
А, В, Н – матрицы размеров nxn, nxm, 1xn.
Предполагая, что известны как измеренные величины скалярный входной сигнал z, матричный входной сигнал u(t) и матрицы объекта А, В, Н, произведем синтез устройства для наблюдения вектора состояния объекта х [7, 22].
Пусть  – оценочное значение вектора х, тогда, согласно (4.2), оценочное значение выходного сигнала
– оценочное значение вектора х, тогда, согласно (4.2), оценочное значение выходного сигнала  . Оценка содержит ошибку, если
. Оценка содержит ошибку, если  отличается от значения, полученным реальным измерением сигнала z. задача заключается в том, чтобы ошибку оценивания
отличается от значения, полученным реальным измерением сигнала z. задача заключается в том, чтобы ошибку оценивания  свести к нулю. [7, 16, 22]
свести к нулю. [7, 16, 22]
Зная u(t) А, В и начальное значение x(t0) можно оценить x(t), если подвести сигнал u(t) к электронной модели объекта
 (4.3)
(4.3)
где x(t0) задано.
Недостаток оценивающего устройства (4.3) состоит в том, что он действует по разомкнутому циклу [7, 16, 22]. Поскольку данные об u(t) А, В - неточны, то после некоторого времени работы это устройство будет давать слишком неточную оценку вектора х. Чтобы при сохранении линейности данного устройства устранить отмеченный недостаток, было предложено ошибку  ввести в каждое из уравнений системы (4.3), т.е. перейти к оценивающему устройству (4.4) [22]:
ввести в каждое из уравнений системы (4.3), т.е. перейти к оценивающему устройству (4.4) [22]:
 (4.4)
(4.4)
где
Устройство, описываемое уравнением (4.4), производит оценку вектора х по замкнутому циклу и называется наблюдающим устройством идентификации или фильтром Льюинбергера [7, 16, 22].
Если ошибку оценивания определить как (4.5)
 (4.5)
(4.5)
то эту ошибку можно находить из уравнения (4.6):
 (4.6)
(4.6)
получаемого вычитанием уравнения (4.1) из уравнения (4.4). Выбрав коэффициенты усиления  так, чтобы система (4.6) была устойчивой, получим
так, чтобы система (4.6) была устойчивой, получим  при
при  . Другими словами, с ростом t оценка
. Другими словами, с ростом t оценка  стремится к оцениваемому вектору х(t) [7 , 16].
стремится к оцениваемому вектору х(t) [7 , 16].
Если по измеренному сигналу z(t) объект (4.1) полностью наблюдаем, то выбором коэффициентов можно замкнутой системе (4.4) придать любое желаемое распределение корней, т.е. можно синтезировать наблюдающее устройство идентификации. Если же по выходному сигналу z(t) вектор состояния объекта х наблюдаем не полностью, то с помощью начальных условий можно оценить лишь наблюдаемую часть вектора состояния [22].
4.2 Алгоритм оценки угловой скорости
Построим систему оценки угловой скорости.
Имеем систему уравнений [1, 3]:
 (4.7)
(4.7)
где  - проекции мгновенной угловой скорости объекта на оси ССК,
- проекции мгновенной угловой скорости объекта на оси ССК,
 - моменты инерции объекта,
- моменты инерции объекта,
 - управляющий и возмущающий моменты соответственно,
- управляющий и возмущающий моменты соответственно,
i = x, y, z.
Вектор моментов является функцией  . Таким образом, имеется три уравнения, связывающие шесть независимых функций
. Таким образом, имеется три уравнения, связывающие шесть независимых функций  .
.
Получим еще три уравнения при помощи кинематических уравнений, которые в кватернионной форме имеют вид [5]:
 (4.8)
(4.8)
Для малых углов имеем:
 (4.9)
(4.9)
Запишем уравнения (4.7) с учетом (4.9):
 (4.10)
(4.10)
Для построения системы оценки примем следующую модель объекта наблюдения:
где  - оцениваемое приращение угла поворота,
- оцениваемое приращение угла поворота,
u – вектор управления.
Пусть производится измерение приращения угла поворота qj:

где  - фактический угол поворота объекта за такт БЦВМ.
- фактический угол поворота объекта за такт БЦВМ.
Матрица Н из уравнения (4.8) имеет вид: [1 0 0].
Модель системы наблюдения (4.10) представим в форме Коши:
Тогда система (4.10) примет вид:
 (4.11)
(4.11)
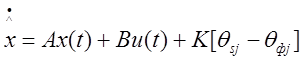
т.е. в векторной форме получим уравнение (4.7), где
Вектор состояния x(t) определяется решением векторно-матричного уравнения (4.7):

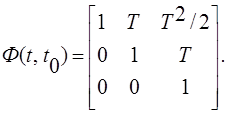
где Ф(t, t0) – фундаментальная матрица, являющаяся переходной для (4.7).
Ф(t, t0) = еА(t - t0) (4.12)
Найдем еА(t - t0) используя преобразование Лапласа.
Найдем Ф-1(s):
detФ(s) = S3,
Выполняя обратное преобразование Лапласа, получим фундаментальную матрицу системы (4.12):
Уравнение, оценивающее вектор х, имеет вид [5, 16, 22]:
При малом периоде квантования Т вектор x(t) – линейная функция времени, следовательно [16]:

Пренебрегая Т2, решение системы (4.11) запишем [7]:
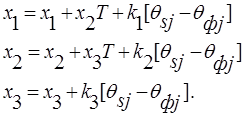 (4.13)
(4.13)
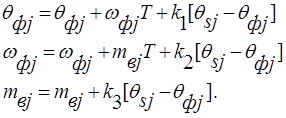
Модель объекта наблюдения будет иметь вид [7, 16, 22]:
Найдем коэффициенты k1, k2, k3.
Вычитая уравнения (4.11) из уравнений (4.13), получим [7, 16, 22]:
Запишем характеристическое уравнение для этой системы:
 (4.14)
(4.14)
Пусть для системы оценки угловой скорости желательны равные отрицательные корни:  Тогда желаемый характеристический полином примет вид:
Тогда желаемый характеристический полином примет вид:
 (4.15)
(4.15)
Приравнивая коэффициенты при одинаковых степенях S в уравнениях (4.14)и (4.15), получим [7, 16, 22]:
Произведем аналитическое обоснование выбора коэффициентов усиления алгоритма оценки угловой скорости.
Рассмотрим характеристическое уравнение [16, 22]:

Приведем его к нормированному виду. Для этого разделим все члены на К3 и введем новую переменную

Получим

На плоскости параметров А и В построим границу устойчивости. Условия устойчивости имеют вид:
A > 0, B > 0, AB > 1.
Уравнение границы устойчивости имеет вид:
АВ = 1 при A > 0 и B > 0.
Выделим в области устойчивости части, соответствующие различному расположению корней характеристического уравнения [7, 16, 22].
В точке А=В=3 характеристическое уравнение имеет три равных корня q1=q2=q3=1. При этом для исходного уравнения получим:
Построим области апериодических процессов (все три корня вещественные - III) и колебательных процессов (один корень вещественный и два комплексных). Причем во втором случае будем различать область, где пара комплексных корней лежит ближе к мнимой оси, чем вещественный - I, и область, где вещественный корень лежит ближе к мнимой оси, чем пара комплексных - II.
В соответствии с методикой границы указанных областей описываются уравнениями:
- кривые CE, CF:

- кривая CD:

На плоскости К1К2 для фиксированного К3 построим области различного расположения корней внутри каждой части области устойчивости (см. рис. 2.1).
На рис. 4.1 точками A, B, C, D, E показаны значения коэффициентов алгоритма оценки угловой скорости, используемые при моделировании. Численные значения коэффициентов при моделировании выбирались из различных участков (I, II, III) области устойчивости.
 |
Рис. 4.1 - Значения коэффициентов алгоритма оценки угловой скорости
4.3 Алгоритм обработки и контроля информации ГИВУС
Включение ГИВУС производится в режиме ВКЛ.
В режиме ВКЛ после наступления тепловой готовности включаются все шесть ЧЭ ГИВУС. После достижения функциональной готовности (~22 мин с момента включения прибора) производится контроль работоспособности ЧЭ и в случае нормы два ЧЭ отключаются. Эти ЧЭ находятся в «горячем» резерве и в случае необходимости могут быть готовы к работе спустя 1 минуту [21].
Задача обработки и контроля информации ГИВУС состоит из следующих алгоритмов [1, 3, 21]:
1. Алгоритм начальной установки задачи ГИВУС.
2. Алгоритм выбора конфигурации включаемых каналов ГИВУС.
3. Алгоритм расчета приращений углов ГИВУС.
4. Алгоритм контроля и формирования признака информативности ГИВУС.
1. Алгоритм начальной установки задачи ГИВУС
Алгоритм рассчитывает матрицу С(6х3) установки шести ЧЭ в приборных осях:
Сi1 = cos(j+dji);
Ci2 = sin(j+dji)×cos((i-1)×q+dqi);
Ci3 = sin(j+dji)×sin((i-1)×q+dqi);
где j, q - углы установки ЧЭ в ПСК;
dji, dqi – погрешности углов установки (і = 1¸6).
Алгоритм также производит обнуление внутренних переменных задачи. По полетному заданию (ПЗ) (параметр IZGIV*) выбирается число включаемых в режиме ЧЭ [21]:
IZGIV*=2 - работа на 5 ЧЭ;
IZGIV*=1 - работа на 4 ЧЭ;
IZGIV*=0 - работа на 3 ЧЭ.
По ПЗ задается признак контроля Zcon:
Zcon = 0 – наличие контроля;
Zcon = 1 – отсутствие контроля.
Алгоритм разовый, работает на первом такте каждого режима.
2. Алгоритм выбора конфигурации включаемых каналов ГИВУС
Алгоритм работает на тех тактах режима, где происходит смена работающего комплекта чувствительных элементов (ЧЭ), функционально при возникновении отказа или по ПЗ [1, 3, 21].
Алгоритм состоит из трех частей, соответствующих трем состояниям признака работы IZGIV*=0V1V2.
При IZGIV*=2 алгоритм формирует пятерку работающих ЧЭ из числа исправных. Из этой пятерки выбирается ортогональная управляющая тройка ЧЭ для формирования матрицы управления В(3х3). Если номера работающих ЧЭ выбираются по ПЗ, то управляющей тройкой считаются первые три из заданных.
При IZGIV*=1 из числа исправных ЧЭ выбираются номера четырех ЧЭ: 3 из них считаются управляющими, а четвертый используется для контроля. Выбор четверки по ПЗ осуществляется аналогично случаю IZGIV*=2.
При IZGIV*=0 выбор работающих измерительных каналов осуществляется аналогично случаю работы на четырех ЧЭ, отличие состоит в том, что контрольный ЧЭ не формируется [21].
Алгоритм ЧЭ формирует запросы на включение ЧЭ IPVG(i)=1 после определения их номеров [21].
В результате формируется управляющая матрица В(3х3), используемая в расчетах проекций приращений углов на приборные оси. Для этого формируется вспомогательная матрица D(3х3), составленная из строк матрицы С(6х3), соответствующих номерам управляющих ЧЭ. Управляющая матрица рассчитывается следующим образом [21]:
B = D-1.
Алгоритм тактированный, работает с тактом То=0,1 с.
3. Алгоритм расчета приращений углов
Алгоритм формирует суммарные признаки функциональной и точностной готовности ГИВУС по признакам, приходящим из подсистемы. Осуществляет выбор диапазона измерений ГИВУС по признаку ППД, формируемому алгоритмами режимов [5 ,21].
Алгоритм формирует информацию о приращениях углов, измеренных каждым ЧЭ  :
:
 (i=1¸6),
(i=1¸6),
где mi – цена импульса і-го ЧЭ ГИВУС;
Ni – число импульсов с і-го ЧЭ за такт;
wti – паспортизуемый уход і-го ЧЭ.
Рассчитываются приращения углов [5, 7] поворота объекта в проекциях на приборные оси ГИВУС qgj :
 ,
,
где Вjk – элементы матрицы управления;
nuprk – номера управляющих ЧЭ ГИВУС (j=1¸3; k=1¸3).
Затем вычисляются проекции приращений углов на оси визирной системы координат (ВСК) qj:



где ADj – погрешности установки ПСК ГИВУС относительно ВСК;
qyxj – вычисленный на борту угловой уход (j=1¸3).
Алгоритм тактированный, работает с тактом То=0,1 с.
4. Алгоритм контроля ГИВУС
Контроль осуществляется при условии IZCON=0.
Алгоритм рассчитывает приращение угла по контрольной оси и сравнивается с приращением, полученным с контрольного ЧЭ [21]:
qk = Cncon,1qg1 + Cncon,2qg2 + Cncon,3qg3
|qk -`qncon|<dqp
где ncon – номер контрольного ЧЭ;
dqp – порог контроля информации.
Если разность не превышает порог dqp, заданный в ПЗ, то все включенные ЧЭ считаются исправными. В противном случае для идентификации отказавшего ЧЭ алгоритм формирует заявку на подключение пятого ЧЭ. После достижения им точностной готовности происходит идентификация отказавшего ЧЭ следующим образом: из 5 задействованных ЧЭ формируется 5 групп по 4 ЧЭ в каждой. Для каждой группы вычисляется скалярное рассогласование между показаниями этих ЧЭ. При наличии отказов рассогласование превышает порог dqp и формируется признак ненормы. Поскольку каждый из 5 включенных ЧЭ входит в 4 группы, то при одном отказавшем ЧЭ ненорма рассогласования возникает в 4-х случаях. Для той группы, куда не вошел отказавший ЧЭ, рассогласование будет в норме [21].
Признаку отказа с номером неисправного ЧЭ присваивается значение 1 и спустя время задержки на формирование признака неисправности, заданное в ПЗ, выдается заявка на его отключение.
Если ненорма рассогласования возникла не в 4-х случаях или ненорма возникла при работе на 4 ЧЭ, когда 2 ЧЭ отказали ранее, то формируется признак ненормы контроля, идущий в телеметрию и никаких решений автономно не принимается.
Алгоритм формирует признак смены работающего комплекта ЧЭ IPSM=1.
При отсутствии точностной готовности прибора, или при количестве отказавших ЧЭ, большем 3, или на время переключения диапазонов, или на время подключения 5-го ЧЭ для идентификации отказа формируется IGIV=0. Иначе прибор считается информативным.
На время отсутствия информативности ГИВУС рассчитывается прогнозируемое приращение угла поворота объекта за такт, которое поступает в алгоритм оценки скорости [21]:
 ,
,
где  - оценочная эффективность исполнительных органов;
- оценочная эффективность исполнительных органов;
n – номер такта.
Алгоритм тактированный, работает с тактом То=0,1 с.
Дата: 2019-05-28, просмотров: 422.