Прогресс авиационной, а затем и космической техники за последние 60 лет затронул большинство технических систем, требующих сопряжения технических параметров с функциональными возможностями человека. В полете на современном самолете или космическом корабле возникает комплекс факторов, действующих на человека. Среди них факторы, создающие для человека сенсорно-перцепторные сигналы о его перемещении (вместе с летательным аппаратом) в пространстве, кардинально отличаются от аналогичных натуральных факторов, действующих на человека в естественных условиях. Перемещение со сверхзвуковыми и космическими скоростями и т. п. стало возможным для человека благодаря "адаптации" внешнего пространства, измененного в полете, применительно к психологическим и психофизиологическим требованиям человеческого организма. По мере развития технического обеспечения полета совершенствовались различные системы летательного аппарата, за исключением органов управления полетом, которые остались в основном такими же, какими они были на заре авиации. Что же явилось причиной "косности" авиационной конструкторской мысли, не коснувшейся своими новациями органов управления летательными аппаратами?
Можно назвать по меньшей мере две причины. Первая – это относительная ограниченность объема движений человека, которые могут использоваться для управления летательным аппаратом. И это при, казалось бы, неограниченном числе степеней свободы движений человека. В действительности существует ряд ограничений в использовании тех или иных движений человека для управления внешними объектами. Вторая причина относительной неизменности органов управления полетом состоит в том, что принципиальной особенностью органов управления является то, что они представляют собой (как подвижный объект) модель управляемого летательного аппарата (как подвижного объекта). Это существенным образом облегчает концептуализацию в сознании пилота пространственной эволюции органов управления (и своей руки, которой осуществляется управление), требующихся для осуществления пространственных эволюций пилотируемого летательного аппарата. Например, нужно ввести самолет в пикирование – летчик как бы "пикирует" рукояткой штурвала; для введения самолета в кабрирование летчик осуществляет перемещение рукоятки штурвала "на себя", т. е. ставит ее в положение, напоминающее положение кабрирующего самолета и т. д.
В полетах на летательных аппаратах возникают ускорения, изменяющие структуру сенсомоторной координации у пилота. Поэтому в курсе летной подготовки значительное место принадлежит созданию навыков, психологических установок, умений, позволяющих летчику парировать эффекты сенсомоторной дискоординации, возникающие при действии на него ускорений в полете. Навыки, умения "парировать" указанную дискоординацию управляющих движений у летчиков не устойчивы. Не случайно для восстановления системы этих "умений" каждый летчик независимо от его профессионального опыта должен проходить летный тренаж после многодневного перерыва в полетах.
Однако нарушение этой системы навыков и умений может происходить и без длительного перерыва в полетах, например при изменении функционального состояния летчика вследствие усталости, лишения сна, эмоционального потрясения, фармакологического воздействия и т. п.
Таким образом, в системе инженерно-психологической адаптации технических устройств летательного аппарата как бы существует иногда открывающаяся брешь. Система защиты летчика от стрессогенных факторов гравитоинерционной среды может оказаться неуспешной в важнейшем ее звене – в звене ввода управляющих усилий человека в систему управления летательным аппаратом.
Скорость движений
Различия эмоционально-двигательного реагирования в невесомости (активного или пассивного) проявлялись не только в поведении людей, но и в показателях операторской деятельности в этих условиях. Это было установлено в экспериментах с участием 38 человек, адаптированных к невесомости в ходе многократного ее повторения. При первых пребываниях в этих условиях одни из них отличались активным, другие пассивным реагированием.
После наступления невесомости в подавляющем большинстве случаев возрастало время "отработки" цифрового сигнала, причем в большей мере у лиц, отличавшихся ранее пассивным эмоционально-двигательным реагированием в невесомости.
Обращает на себя внимание тот факт, что 32 из 38 испытуемых независимо друг от друга с уверенностью сообщили, что в невесомости движения выполняются быстрее, а при перегрузке медленнее, чем во время горизонтального полета или в наземных условиях. Остальные шесть человек не отметили различия работоспособности в режимах полета. Таким образом, у большинства испытуемых имела место субъективная "переоценка" показателя успешности собственных действий в невесомости.
После адаптации к невесомости испытуемые "отрабатывали" цифровые сигналы в этих условиях быстрее, чем в горизонтальном полете, не замечая этого. По мере адаптации к гравитационному стрессору уменьшалась его субъективная экстремальность, при этом динамика изменений скорости действий испытуемых соответствовала закону Йеркса – Додсона. Стрессогенный фактор (невесомость) "провоцировал" возникновение различий показателя операторской деятельности у испытуемых, склонных либо к активному, либо к пассивному реагированию при стрессе (см. рис. 12).
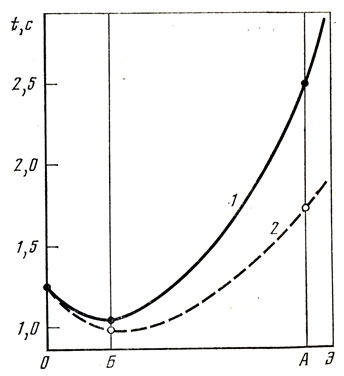
Рис. 12. Различия времени реакций в невесомости у малоадаптированных испытуемых (А) и у них же после многократного адаптирования в этих условиях (Б): 1 – активно реагировавшие на невесомость; 2 – пассивно реагировавшие на невесомость. Э – субъективная экстремальность
Координация движений
Исследования двигательной активности человека-оператора в режимах кратковременной невесомости были призваны решить ряд проблем организации управления космическими кораблями. На основании теоретических выкладок Габер и Гератеволь [402] предположили, что после исчезновения действия силы тяжести вытянутая вперед рука будет непроизвольно подниматься вверх и что эта тенденция должна проявиться также при целенаправленных перемещениях руки. Специальные исследования координации точных движений рукой показали правильность указанного прогноза. При прицельной стрельбе из пистолета в невесомости попадания смещались вверх, а при перегрузке – вниз относительно места попаданий при естественной силе тяжести [390]. Вопреки субъективному впечатлению стрелков качество стрельбы больше ухудшалось при перегрузке, превышающей силу тяжести на 0,5 ед., чем при невесомости, отличающейся от земной силы тяжести на 1 ед.; центр кучности попаданий смещался в невесомости не только вверх, но и вправо; дифференциация мастерства стрелков сохранялась при изменениях силы тяжести в полете и т. д. [116]. Было показано, что поступательные реакции при уменьшении действия силы тяжести проявляются неодинаково в проксимальных и дистальных отделах конечностей. Таким образом, при изменении действия силы тяжести, несмотря на наличие визуального контроля за положением пистолета относительно мишени, возникают субъективно незаметные изменения этого положения руки. Выявлению закономерностей указанной дискоординации должны были способствовать исключение визуальной ориентировки в пространстве, а также наличие целенаправленных перемещений руки, усложняющих картину сенсомоторных отношений. Видимо, руководствуясь этими соображениями, Бек Г. [310] использовал в невесомости методику "диагонального письма". Испытуемый должен был в процессе многократной тренировки научиться рисовать сначала с открытыми, а затем с закрытыми глазами крестики, размещая их в маленьких квадратных рамках, образующих цепочку, идущую из верхнего левого угла в нижний правый угол на листе бумаги, вертикально укрепленном перед испытуемым. В полетах было обнаружено, что испытуемый, рисовавший с закрытыми глазами при естественной силе тяжести крестики согласно заданию цепочкой по диагонали вертикально укрепленного листа слева вниз направо, в невесомости, продолжавшейся 15 сек., начинал рисовать цепочку крестиков, идущую по диагонали вверх направо. Было сделано предположение, что тенденция к подъему руки вверх будет проявляться на протяжении всего пребывания человека в невесомости, и это следует учитывать при конструировании органов управления космических аппаратов. Однако обнаружение фазности развития поведенческих реакций в невесомости показало неубедительность предложения Г. Бека [111, 114, 116, 314, 566].
Данные, противоположные результатам Бека, были получены Уайтсайдом [566], не выключавшим у испытуемых зрения в невесомости. В его исследованиях испытуемый должен был многократно касаться пальцем центра мишени. При этом он не видел своей руки, заслоненной косо поставленным зеркалом, в котором он видел другую мишень, аналогичную первой. При такой постановке эксперимента в невесомости рука смещалась вниз, а не вверх; при перегрузке – вверх, а не вниз. Противоречие между данными Бека и Уайтсайда вызвано различием методов исследования, использованных авторами. Это было доказано экспериментами в полетах по параболе, во время которых испытуемый находился то с выключенным, то с интактным зрением, но при условии, что он ни в том, ни в другом случае не мог видеть руку, которой рисовал. При отсутствии зрительной информации об оптической среде рука поднималась в невесомости; при наличии визуальной информации о "стабильном" пространстве кабины в невесомости преобладали тенденции к опусканию руки [114, 116].
В параболических полетах исследовались траекторные характеристики движения руки к цели под контролем зрения. Эти исследования показали, что при измененном действии силы тяжести возрастает число колебаний руки во время прицельного движения, причем в невесомости преобладают колебания вверх, а при перегрузке – вниз по сравнению с траекторией движения при естественной силе тяжести. По мере адаптации в многократных полетах число колебаний руки при движении ею в невесомости становилось меньшим, чем до полетов. Обнаружено снижение точности движений в невесомости при отсутствии визуального контроля за движущейся рукой [77].
Нами были повторены эксперименты с "диагональным письмом" в параболических полетах. При большей продолжительности невесомости (28–30 сек.) было обнаружено, что возникавшее с исчезновением силы тяжести ошибочное движение руки вверх – направо (вместо заданного вниз – направо) сохранялось не до конца действия невесомости, а лишь 2–4 сек. Затем цепочка крестиков, которые один за другим рисовал испытуемый, вновь принимала направление, близкое к заданному. В начале невесомости часто происходило "распадение" крестовидных фигур, вместо прямых штрихов испытуемые рисовали пики, дуги, запятые, петли и т. д. Это свидетельствовало о временной невозможности выполнить заданное движение руки. Петлевидные поисковые движения рукой, видимо, направлены на восстановление, во-первых, перцептивного образа положения руки и, во-вторых, его соответствия концептуальной модели заданного движения. В ряде случаев в начале невесомости возникали петлевидные движения рукой без касания карандашом бумаги. Испытуемые сообщили, что в начале невесомости "теряли чувство положения руки" или, напротив, что им "удается точно по диагонали рисовать кресты" (тогда как этого не было). "Петлевидные" движения, возникавшие в невесомости, сопоставимы с "поисковыми" движениями, выделенными Б.Ф. Ломовым в структуре сознательного восприятия [1801: и те и другие направлены на поиск объекта восприятия и отличаются относительно большой скоростью и непрерывностью.
Чем вызвано изменение в невесомости заданного направления движения руки? Возрастание усилий мышц, поднимавших руку, – это, во-первых, проявление вестибулярной тонической "лифтной" реакции. Во-вторых, подниманию руки способствовало "остаточное" усилие мышц, поддерживавших руку ранее, при действии на нее силы тяжести. Это усилие должно сохраняться некоторое время после исчезновения силы тяжести. Таким образом, с самого начала действия невесомости происходила "балансировка" усилий мышц, поднимавших руку и опускавших ее. Дискоординацию движений вследствие недостаточной "сбалансированности" мышц – антагонистов к невесомости назовем "рефлекторно-балансировочной дискоординацией". После ее окончания спустя 3–4 сек. восстанавливалось перемещение руки в заданном направлении.
По продолжительности рефлекторно-балансировочная дискоординация сходна с некоторыми другими реакциями, возникающими в невесомости: "последовательный отолитовый образ" сохраняется 3–4 сек.; фаза защитных движений при активном эмоционально-двигательном реагировании в невесомости в большинстве случаев длится 3–5 сек. [116, 118]. Анализ микроструктуры рефлекторно-балансировочной дискоординации в невесомости был предпринят нами с использованием методики "горизонтального письма" (ГП). Испытуемый, фиксированный привязными ремнями в кресле, должен был вытянутой рукой рисовать горизонтальный ряд крестиков на пульте, расположенном перед ним во фронтальной плоскости. ГП проводилось поочередно в одном режиме невесомости – при завязанных глазах, в другом – при открытых глазах и т. д. Ни в том, ни в другом случае испытуемый не видел свою рисующую руку, закрытую шторкой.
При ГП с завязанными глазами типичным было следующее (см. рис. 13). С наступлением невесомости во время продвижения по горизонтали рука испытуемого совершала одно или несколько "петлевидных" движений, как правило, не касаясь карандашом пульта, как бы в поисках того места, где было прервано горизонтальное письмо. Петлевидные движения продолжались 0,5–4 сек. (чаще 1–2 сек.). Вслед за окончанием фазы петлевидных движений испытуемый продолжал рисовать последовательно крестики, причем рука перемещалась по мере их рисования не только вправо, но и одновременно вверх (фаза подъема). По окончании подъема рука перемещалась вниз – направо (фаза опускания). В большинстве случаев горизонтальное перемещение руки восстанавливалось на уровне не более чем на 10–15 мм выше заданного и не позднее седьмой секунды режима невесомости. Однако, у лиц с резко выраженным АР во время первых пребываний в режиме невесомости горизонтальное движение руки могло не восстанавливаться до конца режима невесомости (25–30 сек.). После многократного выполнения ГП в полетах уровень "письма" в невесомости был в среднем на 12 мм ниже заданного уровня. При ускорениях, в наших полетах составлявших 1,5–1,8 g, средний уровень отклонений руки был на 8 мм выше исходного уровня. Сходная тенденция обнаружена Коэном М.М. [340] в опытах на центрифуге, в которых при ускорении 2 g после первого касания ниже центра мишени в среднем на 39,9 мм у испытуемых устанавливался уровень касаний в среднем на 20 мм выше заданного уровня.
Далеко не у всех испытуемых даже во время первых пребываний в невесомости возникали все указанные выше фазы рефлекторно-балансировочной дискоординации при ГП. Часто отмечались одна или две из них. После более продолжительной фазы петлевидных движений последующие фазы дискоординации были слабо выражены или отсутствовали. Напротив, в случаях выраженности фаз подъема и опускания руки фаза петлевидных движений, как правило, отсутствовала. Если для испытуемого было характерно слабовыраженное защитное эмоционально-двигательное реагирование в невесомости, то фаза петлевидных движений у него не возникала.
Дискоординация движений руки в фазе петлевидных (быстрых и ритмичных) движений осознавалась испытуемыми. Это, вероятно, и вызывало приостановку движения по горизонтали. Непрерывное, медленное отклонение руки от заданного уровня в фазах ее подъема и опускания не актуализировалось в сознании. Из отчета испытуемого П.: "В начале невесомости руку тянет вверх и не сразу удается поставить карандаш на тот уровень, где надо рисовать горизонтально расположенные кресты". По данным кинорегистрации, в первые две секунды невесомости испытуемый П. прервал рисование горизонтально размещаемых крестов и совершал рукой петлевидные движения с частотой приблизительно 3 Гц. Из отчета испытуемого Л.: "В невесомости чувствовал, что руку тянет вверх, но, несмотря на это, старался удержать ее горизонтальное движение на заданном уровне". По данным регистрации на протяжении первых 3 секунд невесомости испытуемый Л. рисовал ряд крестиков, поднимающихся вверх – вправо. С четвертой по десятую секунду режима невесомости его рука перемещалась вниз – направо. Таким образом, при невесомости в сознании актуализировались ритмические чередующиеся поднимания и опускания руки, т. е. петлевидные движения, тогда как продолжительные непрерывные поднимания, а затем опускания руки, как правило, не осознавались.
Рефлекторно-балансировочная дискоординация при "горизонтальном письме" была отмечена у лиц как с активным, так и с пассивным эмоционально-двигательным реагированием в невесомости, а также при его неизменности в этих условиях. При наличии выраженного активного эмоционально-двигательного реагирования дискоординация была более выражена (рис. 13 Б). Дискоординация при ГП с изменением силы тяжести возникала и у тех испытуемых, которые до этой пробы неоднократно находились в невесомости, адаптировались к ее действию и не замечали у себя никакой дискоординации движений в этих условиях. Следует особо указать на роль зрительной афферентации в формировании дискоординации движений при гравитационном стрессе. Тонические ("лифтные") рефлексы, направленные на поднимание руки при падении (опускании), подкрепляются визуальной информацией о сдвигающейся (проносящейся) вверх относительно субъекта оптической среде. При опускании (падении) человека в закрытой кабине зрительная информация о стабильности оптической среды противоречит гравирецепторным сигналам о падении и препятствует возникновению "лифтных" рефлексов. Более того, при слабости или редуцированности указанных гравирецепторных сигналов визуализация стабильной оптической среды может способствовать опусканию руки вследствие возникновения в такой ситуации иллюзорного чувства "подъема вверх" относительно окружающей среды. Таким образом, при доминировании концептуальной модели "опускание субъекта относительно окружающей среды" зрительная и гравирецепторная афферентация синергично способствуют подниманию рук. При доминировании концептуальной модели "опускание окружающей среды относительно субъекта" эти информационные потоки конфронтируют: преобладание того или другого определяет направление движения рук в невесомости.
Только ли зрительная афферентация может усиливать эфферентные сигналы к опусканию руки? Для ответа на этот вопрос методика ГП была модифицирована таким образом, чтобы афферентные сигналы о стабильности окружающего пространства, порождающие иллюзию подъема окружающей среды вверх, стали не зрительной, а тактильно-кинестической модальности. Для этого проба проводилась с завязанными глазами, испытуемый левой рукой держался за пульт, а правой рисовал на нем. При этом с исчезновением действия силы тяжести рука смещалась вниз, а не вверх. Таким образом, изменения направлений движения руки были аналогичны возникавшим при открытых глазах. Вероятно, указанный феномен был результатом следующего. На руку, которой испытуемый держался за пульт в невесомости, начинали действовать усилия мышц, поднимающих ее ("лифтная" реакция), но рука не могла быть поднята, так как она была фиксирована на пульте. Реакция противодействия пульта непроизвольному подниманию руки создавала афферентные сигналы, неосознанно воспринимавшиеся как информация о смещении пульта вниз, т. е. об опускании внешней среды. Для сохранения заданного положения относительно "опускающегося" пульта правую рисующую руку следовало опустить. В соответствии с сигналами о его опускании правая рука опускалась (см. рис. 13). Это подтверждает данные Б.Ф. Ломова о том, что перенос осязательного опыта одной руки на построение движения другой рукой может явиться причиной ошибочности этих движений [180].
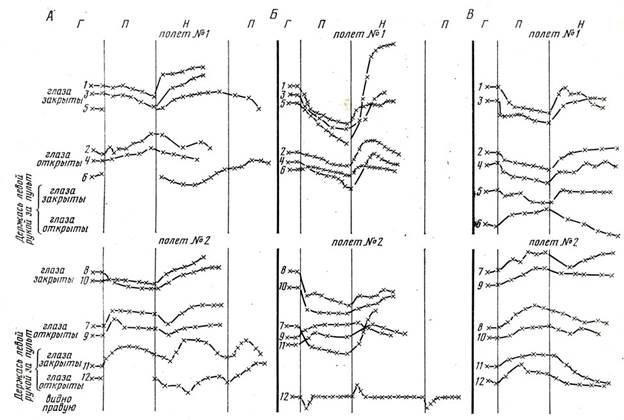
Рис. 13. Схематизированное изображение «горизонтального письма» испытуемых А, Б, В при естественной силе тяжести (Г), перегрузке (П) и в невесомости (Н): 1–12 – последовательные номера параболических полетов
Результаты описанных выше экспериментов говорят также о том, что реакция поднимания руки в невесомости, в частности при пробах с "письмом", обусловлена не только остаточным усилием мышц, поддерживающих руку и освобожденных в невесомости от необходимости ее поддерживать, сколько за счет защитной "лифтной" реакции, т. е. подъема руки под действием вестибулярных тонических влияний, возникающих в невесомости. Действительно, мышцы руки, которой испытуемый держался за пульт, в значительной мере были лишены необходимости поддерживать руку, т. е. в невесомости не должно быть значительного остаточного усилия по поддержанию руки, которое бы "тянуло" ее вверх. Тем не менее левую руку "тянет" вверх в невесомости, что видно по опусканию вниз правой рисующей руки. Но ведь и она испытывает влияние "остаточных" сил, "тянущих" ее вверх. И все же сильнее оказываются непроизвольные мышечные усилия, призванные компенсировать реакцию подъема руки вверх и опускающие ее вслед за пультом, об опускании которого ложно "свидетельствуют" проприорецепторы левой руки, удерживающей неподвижный пульт.
Следует отметить случаи перестройки двигательной реакции в невесомости, когда испытуемый должен был рисовать горизонтальную строчку из крестиков с открытыми глазами, не видя рисующей руки или держась левой рукой за пульт, за которым рисовал правой при выключенном зрении. Как указывалось, в этих условиях у многих испытуемых возникало опускание, а не поднимание руки. Когда же вновь отсутствовал зрительный и тактильный контроль за окружающим, у ряда лиц поднимания руки, имевшего место в предшествовавших режимах невесомости, больше не происходило; вместо него повторялось ее опускание. Подобный феномен отмечен у лиц, профессионально связанных с летным трудом, при наличии у них слабо выраженного, но устойчиво повторяющегося в режимах невесомости АР. Чаще и более отчетливо подобная перестройка двигательного реагирования в невесомости происходила после режимов с тактильным контролем за окружающим. Последнее, видимо, связано с большим значением гомоморфных проприоцептивных влияний от "держащейся" руки на рисующую, чем гетероморфных влияний зрительной информации на формирование эфферентных сигналов к "рисующей руке" (рис. 13, режимы 11, 12).
Возникает вопрос: связана ли реакция подъема руки в невесомости исключительно с исчезновением действия силы тяжести или "включению" этой реакции способствует активация целенаправленных движений руки? Для решения этого вопроса была проведена серия опытов, во время которых испытуемый должен был начать горизонтальное письмо (ГП) на 15‑й секунде режима невесомости. До этого рука с карандашом должна была неподвижно касаться пульта. Глаза испытуемого были завязаны. В этих экспериментах в начале невесомости рука либо немного поднималась, либо совершалось одно или несколько петлевидных движений. К 15‑й секунде невесомости рука находилась в стабильном положении, касаясь карандашом пульта. Начало ГП в ряде случаев провоцировало повторное кратковременное отклонение руки от заданного горизонтального направления. У лиц с недостаточной адаптацией в невесомости отклонение происходило вверх, у адаптированных испытуемых – часто вниз. Данное отклонение сохранялось, как правило, не более 0,5 с, после чего, возвратившись или не возвратившись к исходному уровню, рука двигалась горизонтально.
Таким образом, начало движения, обусловливавшее "подключение" дополнительных систем нейронной регуляции, требовало дополнительной балансировки мышц-антагонистов. Иными словами, начало движения в измененной среде начиналось с ошибочного движения в незаданном направлении (пусковая балансировочная дискоординация). Направление ошибочного движения могло обусловливаться как влиянием усилия разгруженных в невесомости мышц, т. е. "лифтной" тонической реакцией (вверх), так и влиянием установки на компенсацию этого усилия (вниз). Видимо, с пусковой рефлекторно-балансировочной дискоординацией было связано промахивание вверх – вправо при стрельбе в невесомости (см. выше). При этом правильное положение руки, установленное при прицеливании, определенным образом нарушалось началом, т. е. "запуском" движений, связанных с надавливанием на спусковой крючок пистолета.
Особое значение имеют данные о динамике изменений двигательных реакций в измененной гравитационной среде при адаптировании организма в ходе длительного или многократного пребывания в новой среде. Характерным для условий, использованных в настоящей работе, было быстрое исчезновение в повторных тестах ГП петлевидных движений (в случаях, когда они имели место) и постепенное уменьшение величины и продолжительности отклонений руки от заданного горизонтального уровня движений. Дольше сохранялись кратковременные, на 0,5–1 с, "пиковые" отклонения руки испытуемого, направленные "острием" вниз, с наступлением перегрузки и вверх – при ее исчезновении, а также в невесомости (см. рис. 13 Б, режимы 1, 2).
В ходе настоящего исследования было отмечено влияние психологической установки на переформирование концептуальной модели движения рук. Как правило, ни эта установка, ни факт переструктуривания движения не осознавались испытуемым. Приведем примеры. На рис. 13, Б изображены в схематизированном виде результаты ГП, выполненного испытуемым Б. в двенадцати параболических полетах. Первоначально возникали значительные подъемы руки в невесомости и опускания ее при перегрузке, чего оп не замечал. Испытуемый сообщал, что "руку при перегрузке тянет вниз, а в невесомости – вверх, но удается достаточно точно рисовать горизонтальную строчку крестиков". На рисунке видно, что первоначально, т. е. в режимах невесомости № 2,4, 6, выполняющихся при открытых глазах, без визуального контроля за рисующей рукой, у этого испытуемого не возникало отклонения руки вниз. Отклонения ее вверх были в этих случаях значительно ниже, чем при закрытых глазах. По мере повторения полетов по параболе выраженность отклонений руки вверх уменьшалась и при открытых, и при закрытых глазах. Наконец, начиная с девятого режима, при котором испытуемый видел окружающее, за исключением своей рисующей руки, возникло "инвертирование" отклонений движения руки: при перегрузке она стала отклоняться но горизонтали вверх, при невесомости – вниз. В двенадцатом, завершающем полете по параболе горизонтальный экран, закрывающий руку испытуемого, был снят, глаза открыты. Наличие зрительного контроля за рисующей рукой (новые условия эксперимента) разрушило имеющуюся до этого установку, что повлекло возвращение к первоначальной, видимо, более простой, первичной форме реагирования – к "пикообразным" отклонениям руки в невесомости вверх, при перегрузке – вниз. Предотвратить эти движения испытуемый не смог, так как они были неожиданными для него (согласно его сообщению после полета).
На рис. 13, В представлено схематизированное изображение результатов выполнения ГП испытуемым В. в двенадцати полетах по параболе. До начала экспериментов с ГП испытуемый полностью адаптировался к условиям невесомости в 146 ее режимах. У него перестали возникать эмоционально-двигательные, сенсорные и т. п. реакции, первоначально имевшие место в этих условиях. При выключенном зрении (1‑й, 3‑й полеты по параболе) и при интактном зрении (2‑й и 4‑й полеты по параболе) в невесомости его правая, "рисующая" рука смещалась вправо – вверх (при перегрузке – вправо – вниз). Это свидетельствовало о формировании у него неосознаваемой антиципации изменений пространственной среды при доминировании гравирецепторной информации по типу: "опускание субъекта относительно окружающей среды" не только при закрытых, но и при открытых глазах (не видя руки). Как указывалось, у большинства испытуемых во втором случае имелось смещение вниз – вправо рисующей руки, что соответствовало антиципации по типу: "опускание окружающего относительно субъекта". Модель "опускание субъекта", вероятно сформировавшаяся в нервом режиме невесомости, сохранялась у испытуемого В. и в пятом полете по параболе, когда испытуемый при выключенном зрении держался левой рукой за пульт, рисуя правой, т. е., когда имелась тактильная афферентация в пользу модели – "опускание окружающего". И только при суммировании визуальной и тактильной информации, формирующих в режимах полета антиципацию по типу "опускание окружающего в невесомости", в соответствии с нею правая подвижная рука смещалась вниз при невесомости (вверх при перегрузке) во время ГП. Важным явилось то, что в последующих полетах по параболе смещение руки вниз при невесомости (вверх при перегрузке), т. е. в соответствии с антиципацией по типу "опускание окружающего", сохранилось и при отсутствии формирующей эту модель зрительной и тактильной афферентации. Это говорит о существенно большем значении установки при необходимости того или иного вертикального компенсирующего смещения руки (при балансировке вертикальных усилий антагонистических мышц руки), чем текущей информации об изменениях пространственной среды. Можно говорить о своего рода застойности установки у испытуемого В., "управляющей" вертикальной коррекцией при перемещениях руки в условиях изменения вертикально действующих ускорений. Этот вывод позволяет рассмотреть отсутствие у него "инверсии" вертикальных смещений при открытых глазах (во 2‑м и 4‑м полетах по параболе) не столько как результат доминирования гравирецепторной афферентации в организации двигательных реакций (вопреки визуальным сигналам), сколько как результат действия установки, сформированной в первом полете по параболе, когда имелись условия для абсолютного доминирования гравирецепторных сигналов (зрение было выключено, левая рука не касалась пульта).
В ходе экспериментов с ГП у некоторых испытуемых в невесомости имела место циклическая смена направления вертикальной составляющей движения руки. При рисовании горизонтального ряда крестиков рука, перемещаясь слева направо, отклонялась до какого-то уровня выше заданного, затем – вниз, ниже его, затем снова вверх и т. д. Испытуемый В., у которого была отмечена подобная циклическая реакция, сообщал: "В невесомости почувствовал, что руку тянет вверх, но я сохранил правильное, горизонтальное перемещение руки. Вдруг заметил, что "недобрал" и рука оказалась выше, чем ей следовало быть. Чуть-чуть опускаю руку и рисую крестики вроде бы на заданном уровне, но замечаю, что теперь рука оказалась ниже заданного уровня. Немного поднимаю руку, но снова замечаю, что она выше, чем нужно…". После ряда экспериментов испытуемый В. отметил, что "можно мысленно представить, что рука выше, чем надо, и сразу начинаешь чувствовать, что это так и есть".
Описанный феномен говорит об ослаблении чувства положения руки в невесомости. В связи с этим актуализировался процесс перебора альтернативных концептуальных моделей, возникающих при чрезмерном отклонении руки то вверх, то вниз, т. е. при значительной величине ошибки. Нами сообщалось о сходном явлении в зрительной системе. При взгляде на двойную фигуру, например "чаша-профили", у человека, впервые попавшего в невесомость, флуктуация альтернативных образов приостанавливалась; после адаптирования к условиям параболического полета перебор альтернативных решений ускорялся [116]. Указанные явления могут свидетельствовать о том, что процесс принятия решений при кратковременном действии невесомости первоначально может быть неадекватно застойным, а затем активизируется.
Во время невесомости при "горизонтальном" и при "диагональном" письме изменялись не только форма фигур, которые рисовали испытуемые (крестиков), но и их размеры. У 36 из 48 человек, участвовавших в этих экспериментах, величина фигур в невесомости увеличивалась иногда в 3–4 раза по сравнению с исходной; у четырех человек – уменьшалась на 15–20 %; только у шести человек оставалась неизменной. Последние были опытными летчиками-испытателями.
В полетах при выполнении ГП, когда у испытуемых отсутствовала возможность коррекции отклонений руки от горизонтали за счет визуального контроля, была маловероятна значимость также и корректирующих – тактильных сигналов при периодическом касании бумаги кончиком карандаша во время рисования крестиков. Несмотря на это, у всех испытуемых прослежено становление от полета к полету все более "правильного" выполнения ГП, т. е. уменьшение числа и выраженности отклонений от горизонтали. Современные представления о формировании пространственного образа позволяют считать, что отмеченный феномен возникает "потому, что практические действия обеспечивают топкий чувственный анализ особенностей объекта действия и его изменений в процессе манипулирования" [181, с. 191]. Важным звеном коррекции пространственного образа в данном случае является проприоцептивная информация от руки, которой испытуемый рисовал [144]. Ведущую роль в формировании двигательных реакций и дискоординации движений при гравитационных воздействиях играет изменение проприоцептивных сигналов в этих условиях. Согласно современным концепциям мышечная афферентация рассматривается как фактор стабилизации системы, обеспечивающей постоянство основных регулируемых параметров движения в условиях меняющихся нагрузок, как фактор инициации движений, обеспечивающий запуск α-мотонейронов, как единый фактор двигательной координации [Там же].
Возникает вопрос, насколько описанная выше двигательная дискоординация будет проявляться в невесомости при движении руки с перемещением в плоскости, отличной от вертикальной. Для решения этого вопроса в параболических полетах была предпринята серия экспериментов с ГП в горизонтальной плоскости (на плоском столе). При этом ГП осуществлялось испытуемым при перегрузке и в невесомости без отклонений от прямого первоначального направления. Имело место усиление надавливания карандашом на бумагу, непроизвольное поднимание руки с карандашом над листом бумаги и т. п.
По мере повторного пребывания в режимах невесомости реакции непроизвольного поднимания или опускания руки при "горизонтальном письме" становились менее выраженными в режимах невесомости и перегрузки. Подобная тенденция была сходной как у лиц, не имеющих опыта пребывания в невесомости, так и у испытуемых, побывавших в невесомости до их участия в опытах с "горизонтальным письмом". Последнее свидетельствует о том, что для людей, уже адаптированных к действию невесомости, необходима своего рода "оперативная" адаптация при выполнении двигательных операций (движений) в этих условиях.
Приведенные выше данные свидетельствуют о том, что для предотвращения ошибочных движений, возможных при изменениях пространственной среды, в частности при переходе к невесомости или из невесомости к перегрузке при посадке космического корабля, следует учитывать факторы, участвующие в формировании двигательных реакций в этих условиях. Перечислим основные из них: 1) гравирецепторная афферентация, формирующая представление об опускании субъекта вниз относительно окружающего пространства, способствует подниманию руки с целью как бы поймать ускользающие вверх предметы ("лифтная реакция"). Более вероятна такая реакция при отсутствии зрительного контроля за окружающим; 2) гравирецепторньте сигналы, формирующие представление о "тяге вверх", при невесомости способствуют опусканию руки вниз как бы для того, чтобы схватить их ("хватательная реакция"); 3) такое же влияние оказывает зрительная афферентная информация об опускании визуального поля – "окулогравическая иллюзия"; 4) с указанными потоками афферентации, компенсируя их избыточность, конфронтируют установочные влияния на мускулатуру конечностей, направленные на придание им заданного положения (движения). Эти компенсирующие влияния в случае их избыточности обусловливают дискоординацию движений на противоположную (по направлению) той, которая возникала вследствие вышеуказанных механизмов.
Как указывалось, по мере многократного пребывания в режимах невесомости, в ходе адаптации к ней переставали возникать представления об изменениях пространственной среды. Надо полагать, что и после этого при изменениях действия силы тяжести возникла антиципация, не актуализировавшаяся в сознании по направленности своих установочных (управляющих) влияний на двигательный аппарат "работающей" руки, сходная с ранее возникавшими представлениями. Таким образом, отклонения руки от заданного уровня при "горизонтальном письме" в условиях изменений гравитационной среды – это результат сложного конгломерата осознаваемых и неосознаваемых влияний на движение как на волевой акт. Решающее значение в сохранении заданного режима работы имеет визуальная "опора" на стабильное оптическое пространство, в которое включена собственная рука, т. е. когда испытуемый видит руку.
Сила движений
Функциональная перестройка двигательной системы в невесомости должна сказываться на возможностях человека соразмерять усилия, прилагаемые к органам управления. В полетах по параболе было проведено исследование способности 28 человек с разными профессиональными навыками дозировать мышечное усилие. Испытуемый жестко фиксировался в кресле, держась правой рукой за вертикально установленную, неподвижную динамометрическую рукоятку. После обучения на Земле он должен был в полете прилагать к рукоятке разные заданные усилия попеременно "на себя", "от себя", меняя их один раз в секунду. Проведены две серии исследований: в первой – с заданием создавать усилие 5 кг, во второй серии – 15 кг. В экспериментах приняли участие 28 человек – 14 летчиков, остальные с нелетными профессиями. Все испытуемые с нелетными профессиями во время невесомости создавали мышечное усилие меньше заданного, т. е. возникала "переоценка" его (см. рис. 14). При перегрузке имела место противоположная тенденция. Более выраженными эти закономерности были при большем усилии, а также при выполнении усилий "на себя". У пяти летчиков со сравнительно небольшим летным стажем в невесомости зарегистрированы усилия, в большинстве случаев превышающие заданную величину. В некоторых случаях имели место серии усилий меньших, чем заданное или соответствующее заданному. В случаях "недооценки" летчиками своих мышечных усилий в невесомости более выраженной ошибка была при большей величине выполняемых усилий. Опытные летчики в режимах полета создавали усилия, соответствующие заданным. Во всех случаях, согласно послеполетным отчетам испытуемых в режимах невесомости и перегрузки, они создавали усилия, по их мнению, соответствующие заданным, и затруднений при выполнении этой пробы у них не было.
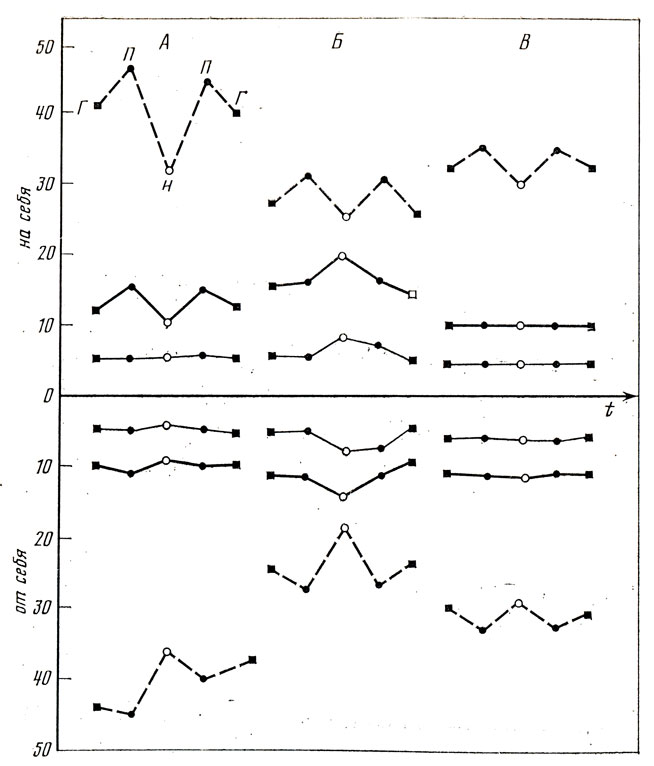
Рис. 14. Результаты выполнения дозированного и максимального усилия испытуемыми А (нелетная профессия), Б (молодой летчик) и В (заслуженный летчик-испытатель СССР): Г – в горизонтальном полете при естественной силе тяжести; П – при перегрузке; Н – в невесомости. Тонкая линия – заданное усилие – 5 кг; жирная – 10 кг; пунктир – максимально возможное усилие Р (кг), t – время
Субъективная "переоценка" создаваемого в невесомости мышечного усилия обусловливается в этих условиях изменением афферентации, в частности проприоцептивной. В ряде работ, выполненных в параболических и орбитальных полетах, показано уменьшение функциональных возможностей двигательной системы в невесомости [292, 294, 398 и др.]. Высказывалось предположение, что в невесомости должно возникать снижение мышечного тонуса, пропорциональное массе мышечных групп, что должно привести к снижению мышечной силы в этих условиях [402]. В случае реальности этих изменений они могли вызвать нарушения в виде субъективной "переоценки" собственных усилий в невесомости. Для проверки этого предположения в параболических полетах нами было проведено исследование способности развивать максимальное усилие. Работа проведена с использованием вышеописанной динамометрической рукоятки при участии лиц, принимавших участие в экспериментах с созданием дозированных усилий.
Максимальные усилия в невесомости были, как правило, независимо от летного опыта испытуемых меньше, а при перегрузке – больше, чем при силе тяжести в горизонтальном полете. Это говорит о том, что субъективная "переоценка" усилий в невесомости – результат уменьшения проприоафферентации и снижения мышечного тонуса в этих условиях. Это согласуется с данными Юганова Е.М. и Касьяна И.И. [292] о снижении в невесомости амплитуды ЭМГ покоящихся мышц ("биоэлектрическое молчание") и возрастании ЭМГ по сравнению с фоновым уровнем при выполнении заданного мышечного усилия. Надо полагать, у летчиков в наших экспериментах при невесомости возникала не актуализировавшаяся в сознании профессиональная установка на компенсацию рефлекторного ослабления мышц в невесомости. В случаях недостаточности профессиональных качеств возникала избыточная компенсация этого ослабления с "недооценкой" собственного усилия.
Подведем итоги проделанного анализа сенсомоторных реакций при воздействии на человека кратковременных линейных ускорений. Подчеркиваем, что мы не рассматривали всей сложности сенсомоторных реакций, имеющих место при многообразии гравитационных воздействий на человека, управляющего современными транспортными средствами (автомобиль, самолет, космический корабль и т. п.).
В данной работе мы намеренно в целях простоты изложения не рассматриваем, в частности, проблему воздействия на сенсомоторику человека угловых ускорений, мы также не касаемся проблемы взаимодействия анализаторов при гравитационном стрессе.
Дата: 2019-03-05, просмотров: 420.