Типовые динамические звенья являются основными элементарными составными частями абстрактных структур непрерывных систем управления, поэтому знание их характеристик облегчает анализ и синтез таких систем.
Типовыми динамическими звеньями называются звенья, описываемые дифференциальным уравнением не выше второго порядка. Такие звенья классифицируются в зависимости от вида левой и правой частей их дифференциального уравнения. Все типовые звенья можно разделить на три группы: позиционные, интегрирующие и дифференцирующие. Каждая из групп в свою очередь содержит несколько типовых звеньев.
Тип динамического звена, соответствующего реальному устройству, зависит от принятых допущений и выбора входной и выходной величин этого устройства. Одно и то же устройство в зависимости от степени его идеализации может быть отнесено к различным типам динамических звеньев.
Рассмотрим наиболее часто встречающиеся на практике типовые динамические звенья и определим для каждого из них основные характеристики: дифференциальное уравнение; передаточную функцию; переходную функцию; функцию веса; амплитудно-фазовую, амплитудную, фазовую и логарифмические частотные характеристики. Названия и вид дифференциальных уравнений типовых звеньев приведены в табл. 4.1.
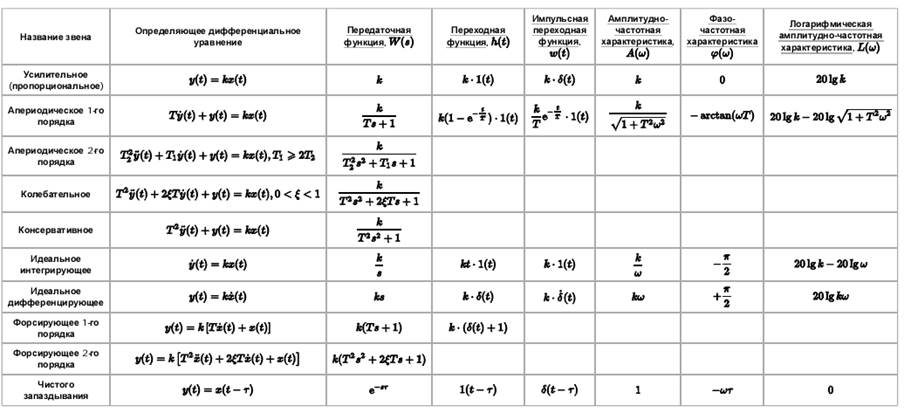
Таблица 4.1. Типовые динамические звенья
IV.3 Передаточная функция
Передаточная функция линейной стационарной системы управления (системы автоматич. регулирования) – преобразованная формула отклика системы на воздействие единичной импульсной функции (дельта-функции) при нулевых условиях в момент t=0 (сам этот отклик наз. функцией веса, импульсной переходной функцией или импульсной характеристикой системы). Эквивалентное определение: передаточной функции есть отношение изображений по Лапласу (см. Операционное исчисление).выходного и входного сигналов с нулевыми начальными данными. Передаточная функция представляет собой дробно-рациональную функцию W(p) комплексного переменного р (s); она является коэффициентом в линейном соотношении
 (1)
(1)
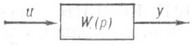
связывающем изображение по Лапласу U(р) входа системы (воздействия, управления) и(t).и изображение по Лапласу Y(р).выхода системы (отклика, реакции) y(t).с нулевыми начальными значениями. В теории управления соотношение (1) принято изображать графически (см. рис.).
Пусть, например, система управления описывается линейным обыкновенным дифференциальным уравнением с постоянными коэффициентами
 (2) (в реальных системах, как правило,
(2) (в реальных системах, как правило,  ).
).
Тогда
 (3)
(3)
Это же выражение можно получить, если, используя операторную форму записи уравнения (2) с помощью оператора дифференцирования р
 определить П. ф. как отношение входного оператора системы В(р) к собственному оператору системы (р). П. ф. (3) системы (2) допускает следующее толкование: если выбрать управление
определить П. ф. как отношение входного оператора системы В(р) к собственному оператору системы (р). П. ф. (3) системы (2) допускает следующее толкование: если выбрать управление  , где s - комплексное число такое, что
, где s - комплексное число такое, что  , то линейное неоднородное уравнение (2) имеет частное решение
, то линейное неоднородное уравнение (2) имеет частное решение  .
.
Передаточную функцию не следует путать с переходной функцией, к-рая представляет собой отклик системы на воздействие единичной ступенчатой ф у н к ц и и
при нулевых начальных условиях.
Передаточная функция является одним из основных понятий теории линейных стационарных систем управления. Она не зависит от характера приложенных к системе управляющих воздействий, а определяется лишь параметрами самой системы и дает тем самым ее динамич. характеристику. Особую роль в теории управления играет функция W(iw) чисто мнимого аргумента, наз. амплитудно-фазовой, или частотной, характеристикой системы. Понятие П. ф. обобщается и на линейные системы управления иных типов (матричные, нестационарные, дискретные, с распределенными параметрами и др.).
Дата: 2019-03-05, просмотров: 624.