Исполни́тельное устро́йство (также актуа́тор, актюа́тор) — устройство системы автоматического управления или регулирования, воздействующее на процесс в соответствии с получаемой командной информацией. Состоит из двух функциональных блоков: исполнительного устройства (если исполнительное устройство механическое, то его часто называют исполнительный механизм) и регулирующего органа, например регулирующего клапана, и может оснащаться дополнительными блоками[1].
В теории автоматического управления под исполнительным устройством понимают устройство, передающее воздействие с управляющего устройства на объект управления. Иногда рассматривается как составная часть объекта управления. Управляющим устройством может быть любая динамическая система.
Входные и выходные сигналы исполнительных устройств, а также их методы воздействия на объект управления могут иметь различную физическую природу.
Исполнительные механизмы классифицируются по роду энергии, назначению и типу управляемых ими элементов, виду перемещений.
Практически всегда перемещение регулирующего органа требует большого перестановочного усилия. Поэтому необходимы силовые элементы, которые называют исполнительными. Для создания перестановочного усилия используется вспомогательная энергия, которая подводится к исполнительным механизмам от дополнительного источника. Это может быть электрическая, пневматическая или гидравлическая энергия.
Регулирующие органы, используемые в системах автоматического регулирования, выполняют в виде клапана, задвижки, заслонки, шибера и т. д. Это зависит от назначения регулирующего органа. В некоторых случаях исполнительный механизм и регулирующий орган изготовляют в одном блоке, поэтому вид исполнительного механизма зависит от вида регулирующего органа, в комплекте с которым он работает.
В общем случае исполнительный механизм перемещает регулирующий орган. Это перемещение может быть поступательным, поворотным (в пределах одного оборота) и многооборотным. Исполнительные механизмы могут выполнять простейшие операции (например, открыть — закрыть регулирующий орган). Такие исполнительные механизмы называют двухпозициоиными. Если они предназначены для плавного перемещения регулирующего органа, то их называют пропорциональными.
Исполнительные механизмы должны иметь:
· достаточное быстродействие;
· возможности линейные статические характеристики;
· мощность большую, чем мощность, необходимую для перемещения регулирующего органа;
· простой и экономичный характер регулирующего воздействия;
· допускаемые для конкретной системы габарит и массу;
· рабочие характеристики, не зависящие от внешних условий;
· надежность в работе.
Исполнительные механизмы, применяемые в системах автоматики, иногда называют серводвигателями. Их можно разделить на две большие подгруппы — неэлектрические и электрические.
К неэлектрическим исполнительным механизмам относятся гидравлические и пневматические двигатели; к электрическим — электрические двигатели постоянного и переменного тока, электромагниты, электромагнитные муфты.
Неэлектрические исполнительные механизмы характеризуются простотой конструкции, большими выходными моментами или усилиями при малом габарите, высоким КПД, большой надежностью.
Типичными конструкциями гидравлических и пневматических исполнительных двигателей являются поршневые, мембранные, шестеренчатые и лопастные.
Электрические исполнительные механизмы характеризуются разнообразием типов, большим числом способов управления, легкостью получения различных скоростей и мощностей, а в промышленных условиях — легкостью получения источников питания.
Объект управления — обобщающий термин кибернетики и теории автоматического управления, обозначающий устройство или динамический процесс, управление поведением которого является целью создания системы автоматического управления.
В теории автоматического управления считается, что управляющее воздействие на объект управления оказывает устройство управления. В реальных системах устройство управления интегрировано с объектом управления, поэтому для результативной теории важно точно определить границу между этими звеньями одной цепи. Например, при проектировании системы управления самолётом, считается, что устройство управления рассчитывает углы отклонения рулей, а математическая модель самолёта как объекта управления, должна, с учётом этих углов, определять координаты центра масс и угловое положение самолёта. Уравнения аэродинамики весьма сложные в общем виде, но в ряде случаев могут быть упрощены путём линеаризации, позволяя создать линеаризованную модель системы управления.
В каждой технической системе (ТС) существует функциональная часть — объект управления (ОУ). Функции ОУ ТС заключаются в восприятии управляющих воздействий (УВ) и изменении в соответствии с ними своего технического состояния (далее — состояния). ОУ ТС не выполняет функций принятия решений, то есть не формирует и не выбирает альтернативы своего поведения, а только реагирует на внешние (управляющие и возмущающие) воздействия, изменяя свои состояния предопределенным его конструкцией образом.
Объекты управления ТС состоят из двух функциональных частей — сенсорной и исполнительной.
Сенсорная часть образована совокупностью технических устройств, непосредственной причиной изменения состояний каждого из которых является соответствующие ему и предназначенные для этого управляющие воздействия.[источник не указан 2179 дней] Примеры сенсорных устройств: выключатели, переключатели, задвижки, заслонки, датчики и другие подобные им по функциональному назначению устройства управления техническими системами.
Исполнительная часть образована совокупностью материальных объектов, все или отдельные комбинации состояний которых рассматриваются в качестве целевых состояний технической системы, в которых она способна самостоятельно выполнять предусмотренные её конструкцией потребительские функции.[источник не указан 2179 дней] Непосредственной причиной изменения состояний исполнительной части ТС (ОУ ТС) являются изменения состояний её сенсорной части.
III.4 Реле
Реле́ — элемент автоматических устройств, который при воздействии на него внешних физических явлений скачкообразно принимает конечное число значений выходной величины.
По виду физических величин, на которые реагируют реле, они делятся на: электрические, механические, тепловые, оптические, магнитные, акустические. Часто реле, которые должны реагировать на неэлектрические величины, выполняют с помощью датчиков, соединенных с электрическими релейными элементами.

Релейные элементы характеризуются параметрами, относящиеся к входным и выходным воздействиям:
срабатывание — минимальное значение воздействия (на входе) при таком его возрастании, что релейный элемент изменяет свое состояние и одновременно воздействует на выходе в соответствии с релейной характеристикой;
отпускание — минимальное значение воздействия на входе при таком его уменьшении, что релейный элемент возвращается в свое первоначальное состояние.
В связи с не идеальностью релейной характеристики эти величины обычно не совпадают друг с другом (гистерезис).
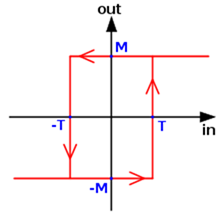
Петля гистерезиса
В ряде случаев релейный элемент может обладать свойствами фиксации, то есть оставаться в занятом им состоянии и после снятия воздействия на входе. В этом случае релейный элемент возвращается в первоначальное состояние обычно после подачи воздействия на другой его вход (или воздействие противоположного знака воздействия на тот же вход). Максимальное значение такого воздействия при его возрастании, вызывающее возвращение релейного элемента в первоначальное состояние, называется параметром возврата. Отношение параметра отпускания к параметру срабатывания называется коэффициентом отпускания. Характеристикой релейного элемента служит так же его быстродействие, определяемое временем срабатывания и временем отпускания или возврата. В ряде случаев важными характеристиками релейного элемента являются: потребление энергии, вес, занимаемый объём и т. п.
По виду физических явлений, используемых для действия релейных элементов, они делятся на механические и электрические.[2] Которые в свою очередь могут быть контактные и бесконтактные.
Дата: 2019-03-05, просмотров: 588.