Объект управления — обобщающий термин кибернетики и теории автоматического управления, обозначающий устройство или динамический процесс, управление поведением которого является целью создания системы автоматического управления.
В теории автоматического управления считается, что управляющее воздействие на объект управления оказывает устройство управления. В реальных системах устройство управления интегрировано с объектом управления, поэтому для результативной теории важно точно определить границу между этими звеньями одной цепи. Например, при проектировании системы управления самолётом, считается, что устройство управления рассчитывает углы отклонения рулей, а математическая модель самолёта как объекта управления, должна, с учётом этих углов, определять координаты центра масс и угловое положение самолёта. Уравнения аэродинамики весьма сложные в общем виде, но в ряде случаев могут быть упрощены путём линеаризации, позволяя создать линеаризованную модель системы управления.
В каждой технической системе (ТС) существует функциональная часть — объект управления (ОУ). Функции ОУ ТС заключаются в восприятии управляющих воздействий (УВ) и изменении в соответствии с ними своего технического состояния (далее — состояния). ОУ ТС не выполняет функций принятия решений, то есть не формирует и не выбирает альтернативы своего поведения, а только реагирует на внешние (управляющие и возмущающие) воздействия, изменяя свои состояния предопределенным его конструкцией образом.
Объекты управления ТС состоят из двух функциональных частей — сенсорной и исполнительной.
Сенсорная часть образована совокупностью технических устройств, непосредственной причиной изменения состояний каждого из которых является соответствующие ему и предназначенные для этого управляющие воздействия.[источник не указан 2179 дней] Примеры сенсорных устройств: выключатели, переключатели, задвижки, заслонки, датчики и другие подобные им по функциональному назначению устройства управления техническими системами.
Исполнительная часть образована совокупностью материальных объектов, все или отдельные комбинации состояний которых рассматриваются в качестве целевых состояний технической системы, в которых она способна самостоятельно выполнять предусмотренные её конструкцией потребительские функции.[источник не указан 2179 дней] Непосредственной причиной изменения состояний исполнительной части ТС (ОУ ТС) являются изменения состояний её сенсорной части.
Классификация объектов проводится по ряду признаков.
Одномерные объекты имеют одну выходную величину и описываются одним уравнением статики и одним уравнением динамики. Примером одномерного объекта может служить резервуар для жидкости, входными величинами которого являются приход Fnр и расход Fp жидкости, а выходной величиной — уровень жидкости L.
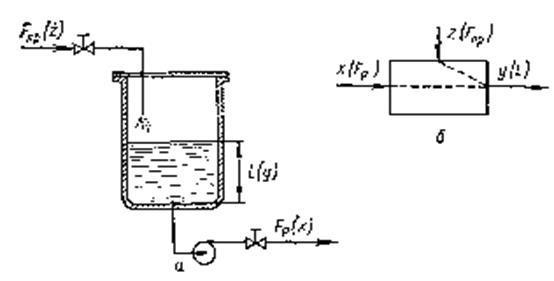
Увеличение (уменьшениеFnр или Fp вызывает изменение уровня L. Уравнения статики этого объекта имеют вид: L = f (Fnр , Fp), а уравнение динамики – L= f (Fnр, Fp, t).
Многомерные объекты содержат по две, три и более выходных величин. Число уравнений, описывающих состояние, должно соответствовать числу выходных величин. Их выходные величины могут влиять или не влиять одна на другую. В многомерных объектах с независимыми выходными величинами изменение любой из входных величин приводит к изменению только своей выходной величины. Такие объекты можно разбить на несколько одномерных объектов и рассматривать их независимо один от другого.
В многомерных объектах с взаимозависимыми выходными величина ми изменение входных величин приводит к одновременному изменению нескольких выходных величин, что объясняется наличием в таких объектах каналов перекрестных связей.
Объекты с сосредоточенными параметрами – объекты, у которых величины имеют одно числовое значение в данный момент времени во всех точках пространства. Например, аппарат под давлением, - давление во всех точках одинаково. Динамика объектов с сосредоточенными параметрами описывается обыкновенными дифференциальными уравнениями с постоянными коэффициентами, которые дополняются начальными условиями. Такие объекты проще автоматизировать.
Объекты с распределенными параметрами – объекты, регулируемые величины которых имеют разные числовые значения в различных точках объекта в данный момент времени. К ним относится большинство объектов: печи, теплообменники, реакторы и т.д. Один и тот же аппарат, в зависимости от параметра, может обладать свойствами объекта, как с сосредоточенными, так и распределенными параметрами. Динамика объектов с распределенными параметрами описывается дифференциальными уравнениями в частных производных, дополненными начальными и граничными условиями. Т.к. решение уравнений в частных производных более сложно, чем решение обыкновенных дифференциальных уравнений, то при составлении математического описания объектов с распределенными параметрами их часто разбивают на ряд последовательно соединенных элементов с сосредоточенными параметрами, каждый из которых описывается обыкновенным дифференциальным уравнением. Точность такого описания тем выше, чем на большее число элементов был разбит исследуемый объект. Для управления такими объектами используют, как правило, многоконтурные АСР.
В зависимости от вида дифференциального уравнения динамики реального объекта химической технологии различают объекты первого, второго и высших порядков.
Объекты 1-го порядка (одноемкостные). К ним относятся сборники жидкости, бункеры для сыпучих материалов, газовые аккумуляторы, жидкостные смесители, теплообменники смешения и т. д. Во всех этих аппаратах количество вещества или тепла заключено в одном резервуаре. Такие объекты обладают способностью аккумулировать (накапливать) проходящие через них вещество или тепло в переходном режиме. Это выражается в том, что рассогласование потоков на входе и выходе при изменении, например, нагрузки вызывает изменение количества вещества или тепла в объекте, а следовательно, и выходной величины объекта. При этом скорость изменения выходной величины объекта зависит от аккумулирующей способности или инерционных свойств объекта.
Объекты 2-го порядка. В таких объектах вещество или тепло заключено в двух объемах, разделенных сопротивлением. Примерами этих объектов являются теплообменник, в котором тепло передается через стенку от одной жидкости к другой; два сообщающихся между собой сосуда с жидкостью и т. д.
Объекты высшего порядка. С повышением порядка дифференциального уравнения объект реагирует на возмущения все более замедленно. Их поведение в динамике идентично поведению цепочки последовательно соединенных апериодических звеньев первого порядка.
По способности восстанавливать равновесное состояние при конечном изменении входных величин объекты подразделяют на нейтральные, устойчивые и неустойчивые.
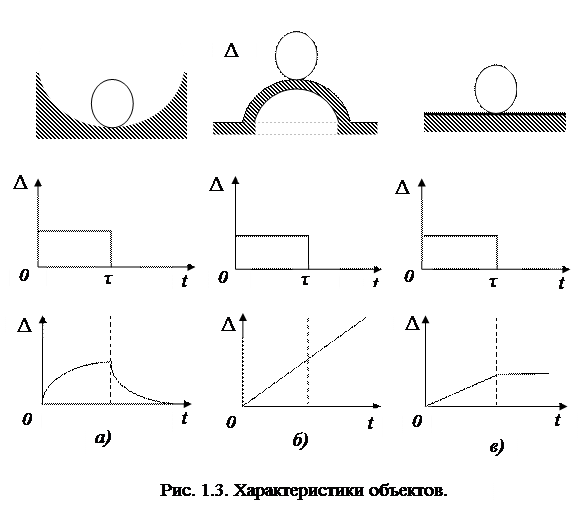 На рис. 1.3 показаны характеристики устойчивого (рис. 1.3, а), неустойчивого (1.3, б) и нейтрального (1.3, в) объектов.
На рис. 1.3 показаны характеристики устойчивого (рис. 1.3, а), неустойчивого (1.3, б) и нейтрального (1.3, в) объектов.
Координата уi в устойчивомобъекте возвращается в исходное состояние после воздействия Du продолжительностью Dt.
В неустойчивомобъекте после окончания воздействия отклонение от начальной величины управляемой координаты продолжает увеличиваться.
Нейтральнымиобъектами являются такие объекты, в которых по окончании воздействия устанавливается новое состояние равновесия, которое зависит от произведенного воздействия.
Механической аналогией здесь является шарик. В лунке (рис. 1.3, а) его положение устойчиво, на вершине холма (рис. 1.2, б) - неустойчиво, а на плоскости (рис. 1.2, в) он в любом месте находится в равновесии.
Дата: 2019-03-05, просмотров: 523.