Для определения величины и точек приложения сил тяжести используют данные о расположении ЦТ звеньев (радиусы ЦТ) и об относительных весах звеньев.
1. Рассчитать относительные веса звеньев тела. Они определяются по таблице 1:
| Звено | Относительный вес (Р, %) | Относительный вес (Р, кг) |
| Голова Туловище Плечо Предплечье Кисть Бедро Голень Стопа | 7 43 3 2 1 12 5 2 | ? ? ? ? ? ? ? ? |
Таблица заполняется студентом при условии, что он принимает вес своего тела за 100%.
2. Определить центры тяжести звеньев. Они определяются или по анатомическим ориентирам (голова, кисть), или по относительному расстоянию ЦТ от проксимального сустава (расположенного ближе к телу), или по пропорции (туловище, стопа) (табл. 2):
| Звено | Расположение ЦТ звена |
| Голова Туловище Плечо Предплечье Кисть Бедро Голень Стопа | Над верхним краем наружного слухового отверстия На прямой, проходящей через середины отрезков, соединяющих центры плечевых и тазобедренных суставов на расстоянии 0,44 от плечевой оси На расстоянии 0,47 от оси проксимального сустава На расстоянии 0,42 от оси проксимального сустава Пястно-фаланговый сустав 3-го пальца На расстоянии 0,44 от оси проксимального сустава На расстоянии 0,42 от оси проксимального сустава На линии между пяточным бугром и 2-м пальцем на расстоянии 0,44 от пятки |
Студент в соответствии собственным ростом и длиной отдельных звеньев тела делает графический рисунок тела (рис. 2) в масштабе (не менее чем в 1 см графического рисунка - 10 см тела).
3. Определить общий центр тяжести (ОЦТ). Графический способ определения основан на сложении параллельных сил. Для определения равнодействующей двух параллельных сил соединяют прямой линией точки их приложения. При сложении сил тяжести двух звеньев эта линия соединяет их ЦТ. На ней расположена точка приложения суммы двух сил (равнодействующей), т.е. общий центр тяжести двух звеньев.
Например, ОЦТ плеча и предплечья находится на линии, соединяющей их ЦТ (рис. 1). Поскольку вес плеча составляет 3%, а предплечья 2% от веса тела, то эту линию следует разделить на 2+3=5 частей. ЦТ двух звеньев расположен ближе к более тяжелому из них (соотношение отрезков линии 2:3, считая от плеча). Далее прибавив силу тяжести кисти, находят ОЦТ всей руки.
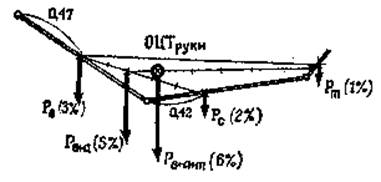
Рис.1. Расчетное определение положения общего центра тяжести трех звеньев руки графическим способом
Так же последовательно суммируют силы тяжести звеньев ноги.
Далее определяется ОЦТ рук и ног.
Затем определяется положение ОЦТ головы и туловища.
Определив ОЦТ головы и туловища (50% веса тела), а также конечностей (другая половина веса), делят расстояние между ними пополам, находя таким образом точку расположения ОЦТ тела (рис. 2).
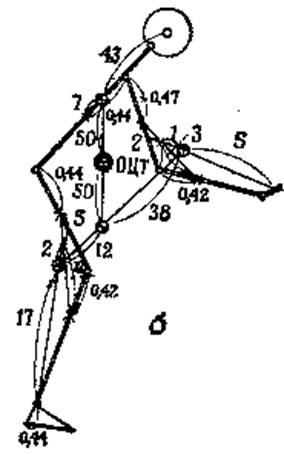
Рис.2. Расчетное определение положения общего центра тяжести всего тела графическим способом
Биомеханика двигательного аппарата человека
Тело человека представляет собой мышечно-скелетную систему, состоящую из твердых (кости), упругих (мышцы) и гибких (связки, мышцы и сухожилия) элементов звеньев.
Биокинематические цепи
Биозвеном называется часть тела, расположенная между двумя соседними суставами или между суставом и дистальным концом.
Например, биозвеньями являются: предплечье, плечо, голова, туловище.
Биомеханика изучает в теле человека, в его опорно-двигательном аппарате, те особенности строений и функций, которые имеют значение для совершенства движений. Отвлекаясь от деталей анатомического строения и физиологических механизмов двигательного аппарата, рассматривают упрощенную модель тела человека – биомеханическую систему.
Она обладает основными свойствами существенными для выполнения двигательной функции, но не включает в себя множество частных деталей. Таким образом, биомеханическая система – это упрощенная копия, модель тела человека, на которой можно изучать закономерности движений.
Биомеханическая система тела человека состоит из биомеханических цепей, образованных биокинематическими парами – подвижными (кинематическими) соединениями двух костных звеньев, в котором возможности движений определяются его строением и управляющим воздействием мышц.
Одни возможности движений не ограничены (их характеризуют степени свободы движения), другие полностью ограничены (они определяются степенями свободы). Различают связи:
а) геометрические (постоянные препятствия перемещению в каком-либо направлении, например костное ограничение в суставе);
б) кинематические (ограничение скорости, например мышцей-антагонистом).
Кинематические пары бывают:
а) поступательные – одно звено может перемещаться поступательно по другому (например, боковые движения нижней челюсти);
б) вращательные (например, повороты в наиболее распространенных в теле человека цилиндрических и шаровидных суставах);
в) винтовые с сочетанием поступательного и вращательного движений (например, в голеностопном суставе).
Соединения, допускающие поворот звеньев пары, называют шарнирами.
Итак, биокинематическая цепь – это последовательное или разветвленное соединение ряда биокинематических пар. Кинематическую цепь, в которой конечное звено свободно, называют незамкнутой, а цепь, в которой нет свободного конечного звена, – замкнутой.
В каждом соединении незамкнутой цепи возможны изолированные движения. Они геометрически независимы от движений в других соединениях. Например, свободные конечности, когда их концевые звенья свободны представляют незамкнутые цепи.
Незамкнутые цепи могут замыкаться, причем часто через опору (рис.).
В замкнутой или замкнувшейся цепи невозможно одиночное изолированное движение, т.е. движение в одном соединении. Так, сгибая и выпрямляя ноги в выпаде, можно убедиться в том, что движение в любом суставе непременно вызывает движения и в других (рис.).
В замкнутых цепях возможностей движений меньше, но управление ими точнее, чем в незамкнутых.
Дата: 2019-02-25, просмотров: 1226.