ОСНОВЫ БИОМЕХАНИКИ
Предмет и история биомеханики
1.1. Биомеханика как наука и учебная дисциплина.
Ее цели и задачи
Биомеханика (от греч. «био» - жизнь и «механика» - орудие) возникла на стыке двух наук – биологии и механики. Кроме изучения непосредственно механического движения человека и животных эта наука также изучает механические аспекты функционирования сердца, движения крови в капиллярах, механизмы травм, прочность тканей, костей и т.д. Таким образом, предмет биомеханики как науки – изучение механических явлений в живых системах.
Рассмотрим биологические и механические явления в живых системах.
Движения человека подчиняются всем законам и закономерностям, которые определяют на Земле движение любого материального тела – это и закон всемирного тяготения, и законы Ньютона, и законы гидроаэромеханики, колебательные и волновые явления и т.д. Движения человека очень сложны, поскольку его двигательный аппарат представляет собой механическую систему, состоящую из более чем 200 костей и нескольких сотен сухожилий. Общее число возможных движений в суставах (так называемых степеней свободы) превосходит 250, число мышц, обслуживающих движения, более 600. Все это необходимо для того, чтобы обеспечить чисто механическое перемещение человека во внешней среде.
Работа мышц – это биологический процесс, при котором мышечные волокна должны быть активированы, чтобы они смогли выполнить механическую работу по перемещению звеньев тела. Чтобы совершить работу, необходимо затратить энергию. В организме человека энергия – это результат биомеханических реакций. С механической точки зрения человек представляет собой систему, обладающую внутренним источником энергии, биологическим по происхождению. Чтобы мышцы сократились в необходимой последовательности и с определенными усилиями и в результате создали требуемый механический эффект движения, ими надо управлять, что делают головной мозг и нервная система, функционирование которых имеет биологическую природу.
Связь психической, биологической и механической функций в деятельности человека образно определил создатель русской физиологической школы И.М. Сеченов (1829 – 1905 гг.). Он писал, что все без исключения качества внешних проявлений мозговой деятельности, которые мы характеризуем, например, словами: одушевленность, страстность, насмешка, чаль и другие, это результаты укорочения какой-нибудь мышцы – акта механического.
Психика человека качественно отличается от высшей нервной деятельности животных, что проявляется и в двигательных действиях. Только человек может сознательно ставить цель движения, осознавать, контролировать и оттачивать его, совершенствовать окружающую среду и создавать специальные приспособления для повышения механического эффекта своих двигательных действий. Лишь человеку доступны высшие символические движения: не только речь, но и рисование, игра на музыкальных инструментах, танец и др. Подавляющее большинство движений человека выполняется с определенной целью. В каждом движении присутствует ориентировочная, исполнительная и контрольная части. Исполнительная часть – это и есть механическое движение, которое изучают в биомеханике. Но оно всегда определяется психической и физиологической деятельностью мозга, обеспечивающей не только непосредственное управление движением, но также ориентировочную и контрольную части двигательного действия по системам внутренней биологической обратной связи.
Спортивная биомеханика изучает двигательные действия человека при выполнении им спортивных упражнений. В ней изучают особенно сложные по своей структуре движения, которые выполняют люди, специально тренирующие свои двигательные способности и подготовленные для реализации в движении предельных возможностей человека как биологического вида.
Основные задачи спортивной биомеханики:
- совершенствование спортивной техники, моделирование и конструирование ее наиболее рациональных вариантов;
- биомеханический контроль техники отдельных спортсменов с целью исправления ошибок и повышения уровня спортивно-технического мастерства;
- выявление биомеханических закономерностей совершенствования двигательных действий;
- прогнозирование тенденций изменения параметров техники выполнения спортивных упражнений с ростом мастерства и спортивной результативности для оценки этапных и конечных показателей на различных циклах подготовки;
- разработка биомеханически целесообразных тренажеров для спорта;
- совершенствование спортивного инвентаря.
Знания по биомеханике необходимы представителям разных профессий, связанных со спортом (инженерам, врачам и др.), но в первую очередь педагогам-тренерам, т.к. биомеханика имеет педагогическую направленность. В спорте и ФВ обучают движениям и совершенствуют двигательные возможности человека. Следовательно, спортивная биомеханика является составной и определяющей частью теории и методики спортивной тренировки и ФВ.
В настоящее время общей тенденцией биомеханики является комплексное изучение двигательной деятельности человека методами различных наук. Таким образом, соединив спортивную биомеханику с физиологией, психологией, биохимией, медициной, удается выявить устойчивые закономерности изменения внутренней среды организма и внешних проявлений работы нервно-мышечного аппарата спортсмена в структуре двигательных действий. Ведь все виды подготовки спортсмена, его функциональное состояние проявляются в технике выполнения упражнений в процессе соревнований.
Краткая история развития
Основные понятия биомеханики
Основные понятия кинематики
Кинематика – это раздел механики, в котором изучают движение тел, не рассматривая причины, вызывающие это движение.
При анализе движений в биомеханике рассматривают движения:
А) поступательное, при котором все точки тела перемещаются по одинаковым траекториями;
Б) вращательное, когда точки тела перемещаются по круговым траекториям, центры которых лежат на оси вращения;
В) составное, когда поступательный и вращательный момент компоненты присутствуют одновременно.
Основными единицами измерения являются метр, килограмм, секунда, градус.
Описание движений человека
Положение тела человека в пространстве определяется его местом, ориентацией и позой.
Место тела характеризуется, в какой части пространства (например, в какой части стадиона, комнаты) находится в данный момент человек. Чтобы определить место тела, достаточно указать три координаты какой-либо точки тела (например, ОЦТ – общий центр тяжести) в неподвижной системе координат.
Ориентация тела характеризует его поворот относительно неподвижной системы координат (вверх головой, вниз головой, горизонтально и т.п.).
Поза тела характеризует взаимное расположение звеньев тела относительно друг друга.
Чтобы лучше ориентироваться относительно взаимного положения частей в человеческом теле, исходят из некоторых основных плоскостей и направлений (рис. 1).
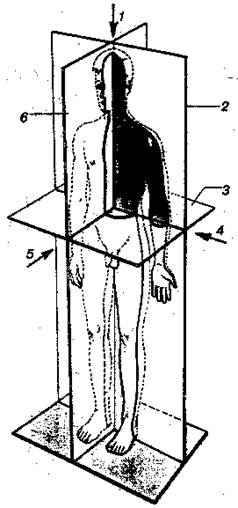
Рис. 1. Схема осей и плоскостей в теле человека
1 – вертикальная (продольная) ось; 2 – фронтальная плоскость;
3 – горизонтальная плоскость; 4 – поперечная ось;
5 – сагиттальная (лат. sagitta – стрела) ось; 6 – сагиттальная плоскость
Динамика движений человека
Основные понятия и законы динамики
Динамика – это раздел механики, в котором изучают движение тел под действием приложенных к ним сил.
В биомеханике также рассматривают взаимодействие между телом человека и внешним окружением, между звеньями тела, между двумя людьми (например, в спортивных единоборствах). В результате взаимодействия возникают силы, которые и являются его количественной мерой.
Прямая, вдоль которой направлена сила, называется линией действия силы. Сила полностью определена, если заданы ее модуль, направление и точка приложения. Если действуют несколько сил, то их можно заменить одной силой, равной их векторной сумме, которая называется равнодействующей.
Движение биомеханической системы тела человека подчиняется механике Ньютона (1643-1727), которое описывает движение материальных объектов на Земле.
Первый закон Ньютона. Изолированная от внешних воздействий материальная точка сохраняет свое состояние покоя или равномерного и прямолинейного движения до тех пор, пока приложенные к ней силы не заставят ее изменить это состояние.
Прямолинейное и равномерное движение материального тела называется инерциальным (или движение по инерции*).
Второй закон Ньютона. Ускорение материальной точки прямо пропорционально приложенной к ней силе, обратно пропорционально массе тале и совпадает с направлением действия силы.
a = F / m
Третий закон Ньютона. Силы, с которыми действуют друг на друга тела, всегда равны и направлены по одной прямой в противоположные стороны.
F 1,2 = - F 2,1
Равенство действия и противодействия имеет место, при ударе по мячу, рука ударяет по мячу, а сила противодействия со стороны мяча действует на руку.
Динамические характеристики
Совокупность динамических характеристик позволяет однозначно описать движение материальных тел и показать, чем одно движение отличается от другого по характеру, направлению и интенсивности.
| Для поступательного движения | Для вращательного движения |
| Масса, кг – мера инертности. Инертность – это свойство физических тел, проявляющаяся в постепенном изменении скорости со временем под действием сил. Чем больше масса, тем инертнее тело и тем труднее его вывести из состояния покоя или остановить, какой-либо приложенной силой. Сила, Н – мера механического действия одного тела на другое, в результате которого тело изменяет свое механическое состояние. Равна произведению массы тела на ускорение: F = ma Импульс силы, Н·с – мера воздействия силы на промежуток времени, в течение которого она действовала на материальное тело. F Δ t Количество движения, кг·м/с (импульс тела) – произведение массы на скорость движения: Р = mv | Момент инерции, кг·м2 – мера инертности. Равен сумме произведений масс всех материальных точек тела на квадрат расстояния этих точек от оси: J = Σmiri ² Момент силы, Н·м – вращающий момент. Определяется произведением модуля силы на ее плечо (d – кратчайшее расстояние от оси вращения до линии действия силы): M = Fd Момент силы считается положительным, когда сила вызывает поворот тела против часовой стрелки, и отрицательным при повороте по часовой стрелке (со стороны наблюдателя) Импульс момента силы, Н·м·с – мера воздействия момента силы относительно данной оси за данный промежуток времени. M Δ t Кинетический момент, кг·м2/с (момент количества движения) – произведение момента инерции тела относительно оси вращения на угловую скорость его вращения: L = Jω |
Силы в движениях человека
Внешние силы вызваны действием внешних для человека тел (опора, снаряды, др. люди, среда и т.п.). Только при их наличии возможно изменение траектории и скорости центра масс (ЦМ); без них движение ЦМ не изменяется.
1. Силы тяжести и вес.
Сила тяжести – это мера притяжения тела к Земле, которая приложена к центру тяжести тела; она равна:
G = mg
Вес тела – это мера воздействия тела в покое на опору (или подвесу), которая мешает его падению.
Р = mg
Т.к. сила тяжести и вес тела приложены к различным точкам, это не одна и та же величина.
2. Сила инерции внешнего тела – это мера действия на тело человека со стороны внешнего тела, ускоряемого человеком; она равна массе ускоряемого тела, умноженная на его ускорение:
F ин. = - ma
Знак минус указывает, что инерция внешнего тела направлена в сторону противоположную ускорению. Она приложена в месте контакта с ускоряемым телом, в рабочей точке тела человека.
Например, ускоряя ядро: его инерция направлена в сторону метателя (такая инерция воспринимается сопротивлением), рабочая точка – ладонь спортсмена. Другой пример, человек ловит набивной мяч, т.е. уменьшает его скорость (сила инерции воспринимается как напор); рабочая точка – то место, которым пойман мяч.
3. Сила реакции опоры – мера противодействия опоры действию на нее тела, находящегося с ней в контакте. Она равна (по третьему закону Ньютона) силе действия на опору, направлена в противоположную сторону и приложена к этому телу. Реакция опоры – сила пассивная. Она не может сама по себе вызвать положительное ускорение. Однако без нее – если нет опоры, человек не может активно перемещаться (например, разворот пловца).
4. Сила упругой деформации – мера действия деформированного тела на другие тела, вызывающие эту деформацию, она равна:
F упр. = Δ l C
где Δl – величина деформации тела, С – коэффициент жесткости или упругости.
Если сжимать динамометр, растягивать эспандер, изгибать доску трамплина или батут, то при этом возникают упругие силы. Нарастая, они останавливают деформацию. Человек совершил работу, передал энергию деформированным внешним телам. После прекращения действия деформирующие силы, потенциальная энергия упругой деформации переходит в кинетическую энергию движущегося тела. В этом случае сила деформированного тела совершает положительную работу (например, покрытия беговых дорожек).
5. Сила трения – сопротивление, возникающее при перемещение одного тела по поверхности другого. Различают трение скольжения (лыжи) и терние качения (колеса велосипеда, подшипники).
T = Nk тр
где N- величина нормального давления (прижимающая сила), kтр – коэффициент трения.
6. Сила действия среды.
При выполнении движений человеку приходится преодолевать сопротивление воздуха и воды.
R = Sm Cx ρ V
где Sm – площадь наибольшего поперечного сечения тела (мидель), Cx – коэффициент лобового сопротивления, зависящий от формы тела, ρ – плотность среды (воды или воздуха), V – относительная скорость среды и тела.
Силы внутренние относительно тела человека возникают при взаимодействии частей тела человека друг с другом.
В частности, они проявляются как силы отталкивания и притягивания внутри тела. В абсолютно твердом теле такие силы взаимно уравновешены, поэтому деформации и напряжения в них не возникают. В теле человека внутренние силы могут действовать статически, при этом возникают только напряжения в деформированных тканях, и динамически, это вызывает движение звеньев и изменение позы.
Выделяют внутренние силы активного действия (мышечная работа) и пассивные механические силы (пассивное взаимодействие).
Силы мышечной тяги, приложенные к костям скелета, служат источниками энергии движения, сохраняют необходимые позы, управляют движениями, изменяют взаимодействие тела человека с окружающими физическими объектами (среда, опора, снаряды и другие люди).
Силы пассивного взаимодействия в отличие от сил мышечной тяги не вызваны непосредственно физиологической активностью, биологическими процессами, хотя в некоторой степени и зависят от них.
По мере совершенствования движений становится возможным лучше использовать мышечные силы. Техническое мастерство проявляется в повышении роли внешних (привести примеры) и пассивных внутренних сил как движущих. Обеспечивается не только экономность, экономичность (КПД), но и проявление максимума мышечных сил, а также значительная быстрота достижения этого максимума при движении.
2.2.4. Геометрия масс тела и методы ее определения
Двигательный аппарат человека образован более чем 600 мышцами и 246 костями. Распределение масс между звеньями тела и внутри звеньев называется геометрией масс (рис.). В более широком смысле слова под геометрией масс в биомеханике принято понимать совокупность показателей, характеризующих распределение массы в теле человека:
- массы,
- моменты инерции отдельных сегментов тела и всего тела в целом,
- координаты центров масс,
- радиусы инерции отдельных сегментов и т.п.
Масса (m) – это количество вещества (в кг), содержащееся в теле или в отдельном звене (например, стопе).
Центр масс – точка, где пересекаются линии действия всех сил, приводящих тело к поступательному движению и не вызывающих вращение тела. У человека, стоящего в о.с., ОЦМ находится примерно на уровне второго крестцового позвонка.
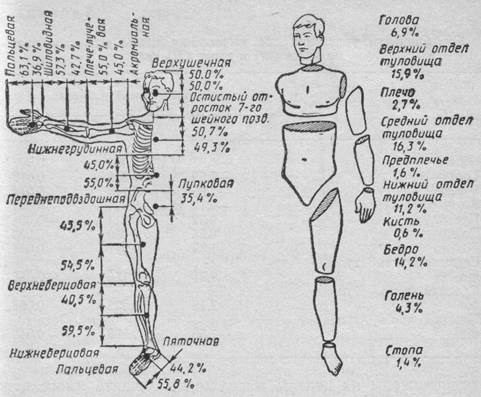
Рис. Относительные веса и положения центров масс (ЦМ)
отдельных биозвеньев тела
Лабораторная работа
Биокинематические цепи
Биозвеном называется часть тела, расположенная между двумя соседними суставами или между суставом и дистальным концом.
Например, биозвеньями являются: предплечье, плечо, голова, туловище.
Биомеханика изучает в теле человека, в его опорно-двигательном аппарате, те особенности строений и функций, которые имеют значение для совершенства движений. Отвлекаясь от деталей анатомического строения и физиологических механизмов двигательного аппарата, рассматривают упрощенную модель тела человека – биомеханическую систему.
Она обладает основными свойствами существенными для выполнения двигательной функции, но не включает в себя множество частных деталей. Таким образом, биомеханическая система – это упрощенная копия, модель тела человека, на которой можно изучать закономерности движений.
Биомеханическая система тела человека состоит из биомеханических цепей, образованных биокинематическими парами – подвижными (кинематическими) соединениями двух костных звеньев, в котором возможности движений определяются его строением и управляющим воздействием мышц.
Одни возможности движений не ограничены (их характеризуют степени свободы движения), другие полностью ограничены (они определяются степенями свободы). Различают связи:
а) геометрические (постоянные препятствия перемещению в каком-либо направлении, например костное ограничение в суставе);
б) кинематические (ограничение скорости, например мышцей-антагонистом).
Кинематические пары бывают:
а) поступательные – одно звено может перемещаться поступательно по другому (например, боковые движения нижней челюсти);
б) вращательные (например, повороты в наиболее распространенных в теле человека цилиндрических и шаровидных суставах);
в) винтовые с сочетанием поступательного и вращательного движений (например, в голеностопном суставе).
Соединения, допускающие поворот звеньев пары, называют шарнирами.
Итак, биокинематическая цепь – это последовательное или разветвленное соединение ряда биокинематических пар. Кинематическую цепь, в которой конечное звено свободно, называют незамкнутой, а цепь, в которой нет свободного конечного звена, – замкнутой.
В каждом соединении незамкнутой цепи возможны изолированные движения. Они геометрически независимы от движений в других соединениях. Например, свободные конечности, когда их концевые звенья свободны представляют незамкнутые цепи.
Незамкнутые цепи могут замыкаться, причем часто через опору (рис.).
В замкнутой или замкнувшейся цепи невозможно одиночное изолированное движение, т.е. движение в одном соединении. Так, сгибая и выпрямляя ноги в выпаде, можно убедиться в том, что движение в любом суставе непременно вызывает движения и в других (рис.).
В замкнутых цепях возможностей движений меньше, но управление ими точнее, чем в незамкнутых.
Костные рычаги
Кости как твердые (негибкие) звенья, соединяясь подвижно, образуют основу биокинематических цепей. Приложенные силы действуют на звенья как на рычаги или маятники.
Костные рычаги – звенья тела, подвижно соединенные в суставах под действием приложенных сил, - могут либо сохранять свое положение, либо изменять его. Они служат для передачи движения и работы на расстояние. Все силы, приложенные к звену как рычагу, можно объединить в две группы:
а) силы или их составляющие, лежащие в плоскости оси рычага (они не могут повлиять на движение вокруг этой оси);
б) силы или их составляющие, лежащие в плоскости, перпендикулярной к оси рычага (они могут влиять на движение вокруг оси в двух противоположных направлениях).
Рассматривая действие сил на рычаг, учитывают только силы, направленные по ходу движения (движущие) и против него (тормозящие).
Когда группы сил приложены по обе стороны от оси (точки опоры) рычага, его называют двуплечим или рычагом первого рода (рис.), а когда по одну сторону – одноплечим, или рычагом второго рода (рис.).
Каждый рычаг имеет следующие элементы (рис.):
а) точку опоры (о);
б) точки приложения сил;
в) плечи рычага (расстояния от точки опоры до точек приложения сил – l);
г) плечи сил (расстояние от точки опоры до линий действия сил – опущенные на них перпендикуляры – d).
Мерой действия силы на рычаг служит ее момент относительно точки опоры (произведение силы на ее плечо).
Сохранение положения и движения звена как рычага зависит от соотношения противоположно действующих моментов сил. Когда противоположные, относительно оси сустава, моменты сил равны, звено либо сохраняет свое положение, либо продолжает движение с прежней скоростью (моменты сил уравновешены). Если же один из моментов сил больше другого, звено получает ускорение в направлении его действия.
Иногда полезно рассматривать движения тела или его звеньев как маятников (например, движение ноги при ходьбе или беге). Звено тела, продолжающее после разгона движение по инерции, имеет сходство с физическим маятником. Маятник в поле силы тяжести, выведенный из равновесия, сначала под действием момента силы тяжести качается вниз, а далее, затрачивая приобретенную кинетическую энергию, поднимается по инерции вверх. Можно рассчитать период качания и ускорение звена. Составные маятники (несколько подвешенных друг к другу маятников) ведут себя намного сложнее. Именно поэтому в каждом шаге моменты мышечных сил нужно приспосабливать к переменным механическим условиям. Чтобы обеспечивать относительное постоянство шагов.
Механические свойства костей определяются их разнообразными функциями: кроме двигательной, они выполняют защитную и опорную функции.
Кости черепа, грудной клетки и таза защищают внутренние органы. Опорную функцию выполняют кости конечностей и позвоночника.
Различают четыре вида механического воздействия на кость:
1. Растяжение. Прочность кости на растяжение выше, чем у дуба, и почти равна прочности чугуна.
2. Сжатие. Самая массивная кость – большеберцовая (в голени) – выдерживает вес 27 человек. Предельная сила сжатия составляет 16000 – 18000 Н (1,6 -1,8 т).
3. Изгиб. Силы 12000 Н (1,2 т) недостаточно, чтобы сломать бедренную кость.
4. Кручение. При ходьбе моменты скручивающих сил могут достичь 15 Н×м. Эта величина в несколько раз меньше предела прочности костей: для разрушения, например, большеберцовой кости момент скручивающей силы должен достичь 30-140 Н×м.
Прочность костей в 2-5 раз превышают силы, действующие на них в повседневной деятельности человека. Если механические нагрузки превышают обычные диапазоны, то организм с ними справляется, гипертрофируя кости. Известно, что у штангистов утолщаются кости ног и позвоночника, у теннисистов – кости предплечья т.д.
Биомеханика мышц
Скелетные мышцы являются основным источником механической энергии человеческого тела. Их можно сравнить с двигателем. Они преобразуют химическую энергию в механическую работу или силу.
Режимы мышечного сокращения
По способу укорочения мышц различают три типа мышечного сокращения:
1. Изотонический режим, при котором волокна мышцы укорачиваются при постоянной внешней нагрузке. В реальных движениях проявляется редко.
2. Изометрический * режим, при котором мышца развивает напряжение без изменения своей длины, на нем построена статическая работа двигательного аппарата человека. Например, в режиме изометрического сокращения работают мышцы человека, который подтянулся и удерживает свое тело в этом положении (или удержание штанги).
3. Анизотонический * * (ауксотонический * ** ) режим, при котором мышца развивает напряжение и укорачивается, именно оно обеспечивает выполнение двигательных действий человека. Т.о., данный режим является основой динамической работы двигательного аппарата человека. В анизометрическом режиме функционируют мышцы бегуна, пловца, велосипедиста и т.д.
Разновидности работы мышц. При натяжении мышцы, превосходящем внешнее сопротивление, она укорачивается. Такой режим мышечного сокращения называется преодолевающим. При натяжении, меньшем внешних сил мышца растягивается (удлиняется). Данный режим называют уступающим. Например, икроножная мышца спринтера функционирует в уступающем режиме при взаимодействии ноги с опорой в фазе амортизации, а в преодолевающем – в фазе отталкивания.
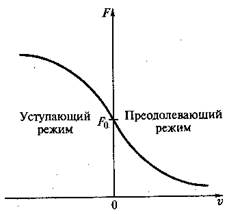
Рис. Взаимосвязь «сила-скорость» при работе мышцы
в уступающем и преодолевающем режимах
Правая часть кривой отображает закономерности преодолевающей работы, при которой возрастание скорости сокращения мышцы вызывает уменьшение силы тяги. В уступающем режиме наблюдается обратная картина: увеличение скорости растяжения мышцы сопровождается увеличением силы тяги, что является причиной многочисленных травм у спортсменов (например, разрыва ахиллова сухожилия у спринтеров и прыгунов в длину). При скорости равной нулю, мышцы работают в изометрическом режиме (статическая работа).
|
|
Напряжение
Длина
Связки и сухожилия
Сухожилия соединяют мышцы и кости, связки обеспечивают соединения между костями. Функции сухожилия заключаются в сообщении усилия мышц кости или хрящу, а связок – в стабилизации сустава. Основой сухожилия и связки является фибрилла*. Считается, что количество и состояние поперечных сцеплений микрофибрилл определяется возрастом, полом и уровнем физической активности.
Механические свойства сухожилий и связок зависят от их геометрических размеров: чем больше поперечное сечение, тем больше прочность; чем связки длиннее, тем большей способностью к растягиванию она обладает. Связки и сухожилия имеют нелинейные свойства – модуль упругости изменяется по мере изменения длины.
Механическая работа
Мышцы, приводящие в движение звенья тела, совершают механическую работу, которая представляет собой произведение перемещения материального тела (Δ S) и составляющей силы, действующей в направлении перемещения (F):
A = F Δ S
Например, для того чтобы подняться по канату на высоту 5 м, студент с массой тела в 80 кг выполняет работу:
80 кг · 9,8 м/с2 · 5 м ≈ 800 Н · 5 м = 4000 Дж
Биомеханика устойчивости
В ФУ человеку нередко бывает необходимо сохранять неподвижное положение тела: исходные (стартовые и др.), конечные (фиксирование штанги после ее поднятия и т.п.), промежуточные (упор углом на кольцах и др.). Во всех таких случаях тело человека как биомеханическая система находится в равновесии. В равновесии могут находиться и внешние тела, связанные с человеком, сохраняющим положение (например, штанга, партнер в акробатике). Для сохранения положения тела нужно закрепить звенья в суставах и не допускать, чтобы внешние силы изменяли его местоположение, ориентацию в пространстве (исключить перемещения и повороты) и связь с опорой. Названные задачи решаются посредством уравновешивания действующих на человека сил и их моментов.
К биомеханической системе могут быть приложены силы тяжести, реакции опоры, веса, мышечные тяги, а также усилия партнера или противника и др. Все силы могут действовать как возмущающие (нарушающие положение) и как уравновешивающие (сохраняющие положение), в зависимости от положения звеньев тела относительно их опоры.
На примере силы тяжести, реакции опоры, силы мышечной тяги рассмотреть конкретные случаи (рис.)
Виды равновесия тела определяются по действию силы тяжести в случае сколь угодно малого отклонения в положении тела:
1) устойчивое – возвращение тела в прежнее положение при любом отклонении – характерно для верхней опоры (рис.), ЦМ поднимается вверх;
2) ограниченно-устойчивое – возвращение тела в прежнее положение только при отклонении в определенных границах – при нижней опоре, когда тело можно отклонять лишь до тех пор, пока линия тяжести не дойдет до до границы площади опоры (рис.);
3) неустойчивое – обязательное опрокидывание при малейшем отклонении – при нижней опоре (для человека практически не существует);
4) безразличное – ЦМ не меняет высоты расположения – у человека такое равновесие только в невесомости.
Степень устойчивости тела человека в разных положениях характеризуется:
1. Статистическим показателем – коэффициентом устойчивости (способностью сопротивляться нарушению устойчивости в определенных направлениях). Коэффициент равен отношению (делению) момента устойчивости (произведение силы тяжести тела на ее плечо) к моменту опрокидывания.
2. Динамическим показателем – углом устойчивости (способностью восстанавливать положение). Угол устойчивости образован линией действия силы тяжести и прямой, соединяющей центр тяжести с соответствующим краем площади опоры (рис.). Для того, чтобы отклонить тело до положения, когда его ЦМ окажется над линией опрокидывания и возникает неустойчивое равновесие, нужно повернуть его в соответствующей вертикальной плоскости на определенный угол (φ). Угол устойчивости показывает, в каких пределах еще действует момент устойчивости.
Не следует смешивать вид равновесия со степенью устойчивости. Вид равновесия определяет лишь основы сохранения положения. Показатели же устойчивости определяют меру возможностей сохранения положения.
Для тела человека при оценке устойчивости положения надо учитывать еще ряд обстоятельств:
1. Поверхность опоры больше площади эффективной опоры. Значит линия опрокидывания всегда расположена внутри границы поверхности опоры. Мягкие ткани и недостаточно сильные мышцы не могут уравновесить нагрузку, и опрокидывание будет раньше, чем линия тяжести пересечет край опорной поверхности.
2. Тело человека при попытке опрокидывания чаще всего не сохраняет позы, а изменяет свою конфигурацию, его звенья перемещаются в суставах.
С точки зрения задачи уравновешивания сил можно выделить три виды статической работы мышц:
1) удерживающая работа – против момента силы тяжести; моментами сил тяги мышц уравновешены моменты силы тяжести звеньев;
2) укрепляющая работа – против сил тяжести, действующих на разрыв; силы мышц тяги укрепляют сустав, принимают на себя нагрузку;
3) фиксирующая работа – против сил тяги мышц-антагонистов и других сил; силы мышечной тяги лишают звено возможностей движения, действуя друг против друга по направлению, но совместно – по задаче.
Итак, устойчивость тела человека определяется его возможностями активно уравновешивать возмущающие силы, останавливать начинающееся отклонение и восстанавливать положение.
Условия устойчивости тела человека:
1. Главный вектор и главный момент внешних сил должны быть равны нулю.
2. Все внутренние силы обеспечивали сохранение позы – все суставы должны быть зафиксированы мышцами (рис.).
3. Вектор тяжести должен лежать в пределах оптимальной площади опоры.
Понятие об управлении
Систему движений человека изучают с точки зрения управления обычно в такой последовательности:
- из каких составных частей она состоит и как они объединены (состав и структура системы);
- каковы характеристики ее движений (состояние системы);
- как выполняется процесс движения по данным регистрации характеристик (поведение системы);
- какие воздействия и каким путем приводят к достижению цели (управление системой).
Структурная схема управления представлена на рис. 37.

Имеется управляемая система (объект управления – О.У.), управляющая подсистема (аппарат управления – А.У.) и среда, в которой действует управляемая подсистема при достижении цели (рис. 37 а). Управляемая подсистема имеет «вход», через который в нее поступает управляющее воздействие (команда), и «выход», через который проявляется ее поведение как смена состояния. Связь только прямая. Это схема разомкнутого контура связи (она не получает сведений о среде и не получает данных о результатах действия).
Самоуправляемая система включает в себя две подсистемы (рис. 37 б): управляемую (О.У.), выполняющую задачу, и управляющую (А.У.), подающую команды, а также два канала обратной связи: внешний (от среды к системе) и внутренней (между подсистемами).
Различают обратные связи:
1) положительные – они усиливают эффект действия системы, подтверждают целенаправленность ее действия, побуждают вести линию поведения дальше;
2) отрицательные – они направлены на снижение эффекта настоящего действия системы, т.к. сигнализируют об отходе от необходимой линии поведения.
Для целесообразного управления бывает необходимо усиливать, и снижать эффект действия.
Движения спортсмена направлены на изменение условий внешнего окружения и на изменение положения собственного тела в окружающей среде. Однако спортсмен вступает во взаимодействие не со всей средой, а с ее частью – полем действия.
Часть поля действия, которое спортсмен изменяет физически, - это моторное поле. Оно физически противодействует его движениям. Одна из частей поля действия сенсорное поле – источник внешней информации, воспринимаемой органами чувств спортсмена. Можно и нужно уметь изменять свое поле действия – то расширять его, то суживать – как в моторной, так и в сенсорной частях.
Исследуя движения человека, Н.А. Бернштейн впервые описал циклы (кольца) взаимодействия:
а) периферический цикл (внешние и реактивные внутренние силы действуют на движущиеся звенья; движения последних изменяет сами названные силы);
б) центральный цикл (сигналы от движущихся звеньев воздействуют на мозг; мозг посылает команды, изменяющие движения звеньев).
Н.А. Бернштейн считал, что «движение возможно лишь при условии тончайшего и непрерывного, не предусмотримого заранее согласования центральных импульсов с явлениями, происходящими на периферии тела».
Управление движениями в переменных условиях.
Движения практически всегда выполняются в переменных условиях, как бы ни казались они постоянными. Каждое движение сопровождается изменением мышечных усилий, положением звеньев тела и их скоростей, взаимодействия с опорой, с другими физическими телами и средой. Возникают, изменяются и исчезают внешние силы.
Т.о., внутренние и внешние механические условия переменны. Поэтому переменны и потоки информации, что и обуславливает приспособление движений к условиям действия. Управление движениями в таких условиях чрезвычайно сложно и вместе с тем в принципе очень совершенно.
Оптимизация управления
Оптимизация управления в спортивной технике включает поиск оптимальной модели двигательного действия (предмета обучения), пути его построения (методики обучения) и наиболее совершенного выполнения действия.
Оптимизация модели осуществляется посредством научных исследований различных сторон и деталей механизма двигательных действий. Целостная модель строится на основе экспериментальных данных, теоретического анализа и практического поиска (ВКР).
Оптимум (что-то наиболее соответствующее задаче в данных условиях) может быть только один. Если же изменяются условия, то изменяется и оптимум. При более или менее сходных условиях имеются более или менее сходные, близкие оптимумы, их вариации.
Т.е. имеется вариативный оптимум, имеющий допустимые границы отклонений, в пределах которых сохраняется оптимальность как лучшее соответствие программ управления двигательной задаче. Из этого вытекает педагогическая установка: искать не единственный точный оптимум, а вырабатывать способность варьировать его соответственно условиям, сохраняя этим возможности достижения высшего результата.
Основой оптимальной методики обучения и совершенствования служит модель рациональной техники, понимание особенностей ее деталей, их взаимосвязей, глубокого смысла каждого требования к движениям, т.е. биомеханическое обоснование техники.
Закономерности биомеханики
и совершенствование спортивного мастерства *
ОСНОВЫ БИОМЕХАНИКИ
Предмет и история биомеханики
1.1. Биомеханика как наука и учебная дисциплина.
Ее цели и задачи
Биомеханика (от греч. «био» - жизнь и «механика» - орудие) возникла на стыке двух наук – биологии и механики. Кроме изучения непосредственно механического движения человека и животных эта наука также изучает механические аспекты функционирования сердца, движения крови в капиллярах, механизмы травм, прочность тканей, костей и т.д. Таким образом, предмет биомеханики как науки – изучение механических явлений в живых системах.
Рассмотрим биологические и механические явления в живых системах.
Движения человека подчиняются всем законам и закономерностям, которые определяют на Земле движение любого материального тела – это и закон всемирного тяготения, и законы Ньютона, и законы гидроаэромеханики, колебательные и волновые явления и т.д. Движения человека очень сложны, поскольку его двигательный аппарат представляет собой механическую систему, состоящую из более чем 200 костей и нескольких сотен сухожилий. Общее число возможных движений в суставах (так называемых степеней свободы) превосходит 250, число мышц, обслуживающих движения, более 600. Все это необходимо для того, чтобы обеспечить чисто механическое перемещение человека во внешней среде.
Работа мышц – это биологический процесс, при котором мышечные волокна должны быть активированы, чтобы они смогли выполнить механическую работу по перемещению звеньев тела. Чтобы совершить работу, необходимо затратить энергию. В организме человека энергия – это результат биомеханических реакций. С механической точки зрения человек представляет собой систему, обладающую внутренним источником энергии, биологическим по происхождению. Чтобы мышцы сократились в необходимой последовательности и с определенными усилиями и в результате создали требуемый механический эффект движения, ими надо управлять, что делают головной мозг и нервная система, функционирование которых имеет биологическую природу.
Связь психической, биологической и механической функций в деятельности человека образно определил создатель русской физиологической школы И.М. Сеченов (1829 – 1905 гг.). Он писал, что все без исключения качества внешних проявлений мозговой деятельности, которые мы характеризуем, например, словами: одушевленность, страстность, насмешка, чаль и другие, это результаты укорочения какой-нибудь мышцы – акта механического.
Психика человека качественно отличается от высшей нервной деятельности животных, что проявляется и в двигательных действиях. Только человек может сознательно ставить цель движения, осознавать, контролировать и оттачивать его, совершенствовать окружающую среду и создавать специальные приспособления для повышения механического эффекта своих двигательных действий. Лишь человеку доступны высшие символические движения: не только речь, но и рисование, игра на музыкальных инструментах, танец и др. Подавляющее большинство движений человека выполняется с определенной целью. В каждом движении присутствует ориентировочная, исполнительная и контрольная части. Исполнительная часть – это и есть механическое движение, которое изучают в биомеханике. Но оно всегда определяется психической и физиологической деятельностью мозга, обеспечивающей не только непосредственное управление движением, но также ориентировочную и контрольную части двигательного действия по системам внутренней биологической обратной связи.
Спортивная биомеханика изучает двигательные действия человека при выполнении им спортивных упражнений. В ней изучают особенно сложные по своей структуре движения, которые выполняют люди, специально тренирующие свои двигательные способности и подготовленные для реализации в движении предельных возможностей человека как биологического вида.
Основные задачи спортивной биомеханики:
- совершенствование спортивной техники, моделирование и конструирование ее наиболее рациональных вариантов;
- биомеханический контроль техники отдельных спортсменов с целью исправления ошибок и повышения уровня спортивно-технического мастерства;
- выявление биомеханических закономерностей совершенствования двигательных действий;
- прогнозирование тенденций изменения параметров техники выполнения спортивных упражнений с ростом мастерства и спортивной результативности для оценки этапных и конечных показателей на различных циклах подготовки;
- разработка биомеханически целесообразных тренажеров для спорта;
- совершенствование спортивного инвентаря.
Знания по биомеханике необходимы представителям разных профессий, связанных со спортом (инженерам, врачам и др.), но в первую очередь педагогам-тренерам, т.к. биомеханика имеет педагогическую направленность. В спорте и ФВ обучают движениям и совершенствуют двигательные возможности человека. Следовательно, спортивная биомеханика является составной и определяющей частью теории и методики спортивной тренировки и ФВ.
В настоящее время общей тенденцией биомеханики является комплексное изучение двигательной деятельности человека методами различных наук. Таким образом, соединив спортивную биомеханику с физиологией, психологией, биохимией, медициной, удается выявить устойчивые закономерности изменения внутренней среды организма и внешних проявлений работы нервно-мышечного аппарата спортсмена в структуре двигательных действий. Ведь все виды подготовки спортсмена, его функциональное состояние проявляются в технике выполнения упражнений в процессе соревнований.
Краткая история развития
Дата: 2019-02-25, просмотров: 1177.