Пространственные характеристики:
1. Траектория – линия, описываемая в пространстве движущейся точкой тела. Характеризуется кривизной и ориентацией в пространстве.
Примеры: траектория мяча, колеса велосипеда, суставы тела.

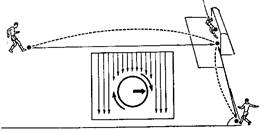
Рис. 1. Траектория полета (пунктир) и перемещение (сплошная линия) мяча при ударе футболиста
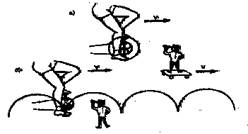
Рис. 2. Пример анализа траектории движения ног велосипедиста
2. Перемещение – это векторная разность конечного и начального положений тела, характеризующая окончательный результат движения.
Линейное перемещение тела измеряется в метрах и определяется по линейному перемещению координат любой его точки.
Угловое перемещение (во вращательном движении) измеряется в градусах и определяется по углу поворота (φ).
3. Путь – это отношение участка траектории, пройденной телом или точкой тела за выбранный промежуток времени.
Временные характеристики:
1. Длительность движения (с) – это разность между началом и окончанием движения. t = tкон – tнач
2. Темп (1/с) – это временная повторность движения. Темп определяют как количество движений в единицу времени (частота движений):
N = 1/t
Например, 60 гребков в минуту.
3. Ритм (1/с) – это характеристика соотношения частей движения во времени.
Чтобы определить ритм, выделяют фазы, которые различаются по задаче движения, по его направлению, скорости, ускорению. Например, соотношение времени опоры и времени полета в цикле бегового шага.
Пространственно-временные характеристики:
1. Скорость – это отношение пройденного пути ко времени, за который он пройден.
При поступательном движении тела линейные скорости (V) всех его точек одинаковы по величине и направлению: V = S/t (м/с)
При вращательном движении определяют угловую скорость тела (ω) как меру быстроты изменения его углового положения: ω = φ/t (град/с)
2. Ускорение – это величина, равная отношению изменения скорости движения тела к длительности промежутка времени, за которое это изменение произошло. а = DV/Dt (м/с2)
Угловое ускорение тела определяют как меру быстроты изменения его угловой скорости: ε = Dω /Dt (град/с2)
Описание движений человека
Положение тела человека в пространстве определяется его местом, ориентацией и позой.
Место тела характеризуется, в какой части пространства (например, в какой части стадиона, комнаты) находится в данный момент человек. Чтобы определить место тела, достаточно указать три координаты какой-либо точки тела (например, ОЦТ – общий центр тяжести) в неподвижной системе координат.
Ориентация тела характеризует его поворот относительно неподвижной системы координат (вверх головой, вниз головой, горизонтально и т.п.).
Поза тела характеризует взаимное расположение звеньев тела относительно друг друга.
Чтобы лучше ориентироваться относительно взаимного положения частей в человеческом теле, исходят из некоторых основных плоскостей и направлений (рис. 1).
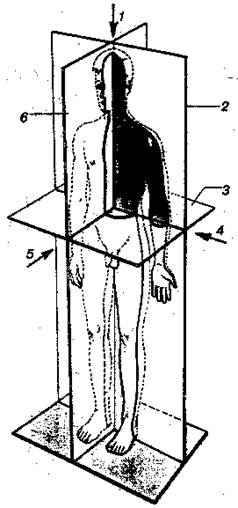
Рис. 1. Схема осей и плоскостей в теле человека
1 – вертикальная (продольная) ось; 2 – фронтальная плоскость;
3 – горизонтальная плоскость; 4 – поперечная ось;
5 – сагиттальная (лат. sagitta – стрела) ось; 6 – сагиттальная плоскость
Динамика движений человека
Основные понятия и законы динамики
Динамика – это раздел механики, в котором изучают движение тел под действием приложенных к ним сил.
В биомеханике также рассматривают взаимодействие между телом человека и внешним окружением, между звеньями тела, между двумя людьми (например, в спортивных единоборствах). В результате взаимодействия возникают силы, которые и являются его количественной мерой.
Прямая, вдоль которой направлена сила, называется линией действия силы. Сила полностью определена, если заданы ее модуль, направление и точка приложения. Если действуют несколько сил, то их можно заменить одной силой, равной их векторной сумме, которая называется равнодействующей.
Движение биомеханической системы тела человека подчиняется механике Ньютона (1643-1727), которое описывает движение материальных объектов на Земле.
Первый закон Ньютона. Изолированная от внешних воздействий материальная точка сохраняет свое состояние покоя или равномерного и прямолинейного движения до тех пор, пока приложенные к ней силы не заставят ее изменить это состояние.
Прямолинейное и равномерное движение материального тела называется инерциальным (или движение по инерции*).
Второй закон Ньютона. Ускорение материальной точки прямо пропорционально приложенной к ней силе, обратно пропорционально массе тале и совпадает с направлением действия силы.
a = F / m
Третий закон Ньютона. Силы, с которыми действуют друг на друга тела, всегда равны и направлены по одной прямой в противоположные стороны.
F 1,2 = - F 2,1
Равенство действия и противодействия имеет место, при ударе по мячу, рука ударяет по мячу, а сила противодействия со стороны мяча действует на руку.
Динамические характеристики
Совокупность динамических характеристик позволяет однозначно описать движение материальных тел и показать, чем одно движение отличается от другого по характеру, направлению и интенсивности.
| Для поступательного движения | Для вращательного движения |
| Масса, кг – мера инертности. Инертность – это свойство физических тел, проявляющаяся в постепенном изменении скорости со временем под действием сил. Чем больше масса, тем инертнее тело и тем труднее его вывести из состояния покоя или остановить, какой-либо приложенной силой. Сила, Н – мера механического действия одного тела на другое, в результате которого тело изменяет свое механическое состояние. Равна произведению массы тела на ускорение: F = ma Импульс силы, Н·с – мера воздействия силы на промежуток времени, в течение которого она действовала на материальное тело. F Δ t Количество движения, кг·м/с (импульс тела) – произведение массы на скорость движения: Р = mv | Момент инерции, кг·м2 – мера инертности. Равен сумме произведений масс всех материальных точек тела на квадрат расстояния этих точек от оси: J = Σmiri ² Момент силы, Н·м – вращающий момент. Определяется произведением модуля силы на ее плечо (d – кратчайшее расстояние от оси вращения до линии действия силы): M = Fd Момент силы считается положительным, когда сила вызывает поворот тела против часовой стрелки, и отрицательным при повороте по часовой стрелке (со стороны наблюдателя) Импульс момента силы, Н·м·с – мера воздействия момента силы относительно данной оси за данный промежуток времени. M Δ t Кинетический момент, кг·м2/с (момент количества движения) – произведение момента инерции тела относительно оси вращения на угловую скорость его вращения: L = Jω |
Силы в движениях человека
Внешние силы вызваны действием внешних для человека тел (опора, снаряды, др. люди, среда и т.п.). Только при их наличии возможно изменение траектории и скорости центра масс (ЦМ); без них движение ЦМ не изменяется.
1. Силы тяжести и вес.
Сила тяжести – это мера притяжения тела к Земле, которая приложена к центру тяжести тела; она равна:
G = mg
Вес тела – это мера воздействия тела в покое на опору (или подвесу), которая мешает его падению.
Р = mg
Т.к. сила тяжести и вес тела приложены к различным точкам, это не одна и та же величина.
2. Сила инерции внешнего тела – это мера действия на тело человека со стороны внешнего тела, ускоряемого человеком; она равна массе ускоряемого тела, умноженная на его ускорение:
F ин. = - ma
Знак минус указывает, что инерция внешнего тела направлена в сторону противоположную ускорению. Она приложена в месте контакта с ускоряемым телом, в рабочей точке тела человека.
Например, ускоряя ядро: его инерция направлена в сторону метателя (такая инерция воспринимается сопротивлением), рабочая точка – ладонь спортсмена. Другой пример, человек ловит набивной мяч, т.е. уменьшает его скорость (сила инерции воспринимается как напор); рабочая точка – то место, которым пойман мяч.
3. Сила реакции опоры – мера противодействия опоры действию на нее тела, находящегося с ней в контакте. Она равна (по третьему закону Ньютона) силе действия на опору, направлена в противоположную сторону и приложена к этому телу. Реакция опоры – сила пассивная. Она не может сама по себе вызвать положительное ускорение. Однако без нее – если нет опоры, человек не может активно перемещаться (например, разворот пловца).
4. Сила упругой деформации – мера действия деформированного тела на другие тела, вызывающие эту деформацию, она равна:
F упр. = Δ l C
где Δl – величина деформации тела, С – коэффициент жесткости или упругости.
Если сжимать динамометр, растягивать эспандер, изгибать доску трамплина или батут, то при этом возникают упругие силы. Нарастая, они останавливают деформацию. Человек совершил работу, передал энергию деформированным внешним телам. После прекращения действия деформирующие силы, потенциальная энергия упругой деформации переходит в кинетическую энергию движущегося тела. В этом случае сила деформированного тела совершает положительную работу (например, покрытия беговых дорожек).
5. Сила трения – сопротивление, возникающее при перемещение одного тела по поверхности другого. Различают трение скольжения (лыжи) и терние качения (колеса велосипеда, подшипники).
T = Nk тр
где N- величина нормального давления (прижимающая сила), kтр – коэффициент трения.
6. Сила действия среды.
При выполнении движений человеку приходится преодолевать сопротивление воздуха и воды.
R = Sm Cx ρ V
где Sm – площадь наибольшего поперечного сечения тела (мидель), Cx – коэффициент лобового сопротивления, зависящий от формы тела, ρ – плотность среды (воды или воздуха), V – относительная скорость среды и тела.
Силы внутренние относительно тела человека возникают при взаимодействии частей тела человека друг с другом.
В частности, они проявляются как силы отталкивания и притягивания внутри тела. В абсолютно твердом теле такие силы взаимно уравновешены, поэтому деформации и напряжения в них не возникают. В теле человека внутренние силы могут действовать статически, при этом возникают только напряжения в деформированных тканях, и динамически, это вызывает движение звеньев и изменение позы.
Выделяют внутренние силы активного действия (мышечная работа) и пассивные механические силы (пассивное взаимодействие).
Силы мышечной тяги, приложенные к костям скелета, служат источниками энергии движения, сохраняют необходимые позы, управляют движениями, изменяют взаимодействие тела человека с окружающими физическими объектами (среда, опора, снаряды и другие люди).
Силы пассивного взаимодействия в отличие от сил мышечной тяги не вызваны непосредственно физиологической активностью, биологическими процессами, хотя в некоторой степени и зависят от них.
По мере совершенствования движений становится возможным лучше использовать мышечные силы. Техническое мастерство проявляется в повышении роли внешних (привести примеры) и пассивных внутренних сил как движущих. Обеспечивается не только экономность, экономичность (КПД), но и проявление максимума мышечных сил, а также значительная быстрота достижения этого максимума при движении.
2.2.4. Геометрия масс тела и методы ее определения
Двигательный аппарат человека образован более чем 600 мышцами и 246 костями. Распределение масс между звеньями тела и внутри звеньев называется геометрией масс (рис.). В более широком смысле слова под геометрией масс в биомеханике принято понимать совокупность показателей, характеризующих распределение массы в теле человека:
- массы,
- моменты инерции отдельных сегментов тела и всего тела в целом,
- координаты центров масс,
- радиусы инерции отдельных сегментов и т.п.
Масса (m) – это количество вещества (в кг), содержащееся в теле или в отдельном звене (например, стопе).
Центр масс – точка, где пересекаются линии действия всех сил, приводящих тело к поступательному движению и не вызывающих вращение тела. У человека, стоящего в о.с., ОЦМ находится примерно на уровне второго крестцового позвонка.
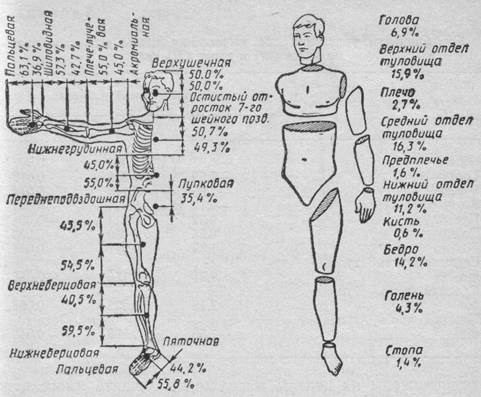
Рис. Относительные веса и положения центров масс (ЦМ)
отдельных биозвеньев тела
Лабораторная работа
Дата: 2019-02-25, просмотров: 672.