Динамические свойства
Цель работы: Исследовать влияние структуры и параметров САР на её статические и динамические свойства.
Теоретические сведения
Статические и динамические свойства САР во многом зависят от структуры последней (наличие или отсутствие в контуре регулирования интегрирующих звеньев) и её параметров (коэффициента разомкнутой системы, постоянных времени звеньев). Основным показателем точности САР в статике является статическая ошибка – отклонение выходной координаты от заданного значения под действием возмущения (в установившихся режимах). Другими словами, статическая ошибка – это разность между начальным и конечным установившимися значениями выходной величины. Статическая ошибка системы зависит от типа регулятора (пропорциональный или интегральный) и коэффициента разомкнутой системы (для САР с пропорциональным регулятором).
Основным динамическим показателем САР является её устойчивость – способность системы принимать прежнее или новое установившееся значение после окончания переходных процессов. Часто немаловажным является и качество переходных процессов – длительность переходных процессов, перерегулирование, колебательность и др. Динамические свойства системы зависят от типа регулятора, коэффициента разомкнутой системы и постоянных времени звеньев, входящих в контур регулирования.
Задание №1. Исследовать влияние величины коэффициента разомкнутой системы на статические и динамические свойства САР с пропорциональным регулятором.
Снять переходную характеристику САР с пропорциональным регулятором, структурная схема которой приведена на рисунке 4.1. Варианты параметров схем приведены в таблице 4.1 и задаются преподавателем.

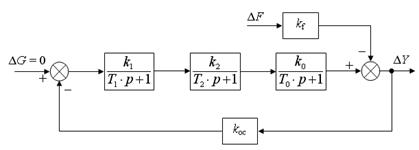
Рисунок 4.1 – Структурная схема САР с пропорциональным регулятором
Таблица 4.1 – Исходные данные к структурной схеме по заданию №1
| Вариант | Т0 | Т1 | Т2 | kf | ΔF | kрс нач |
| 1 | 0,4 | 0,1 | 0,2 | 10 | 1 | 2 |
| 2 | 0,2 | 0,1 | 0,2 | 2 | 2 | 3 |
| 3 | 0,2 | 0,2 | 0,2 | 4 | 1 | 1 |
| 4 | 0,4 | 0,1 | 0,1 | 1 | 10 | 2 |
| 5 | 0,1 | 0,1 | 0,1 | 1 | 4 | 4 |
Практические советы:
- для наглядности возмущение удобнее подавать через некоторую задержку времени (блок Step);
- коэффициент разомкнутой системы kрс удобнее задать в одном из звеньев структурной схемы. При этом передаточные коэффициенты всех остальных звеньев принимаются равными единице.
Методические указания:
1) Снять осциллограмму изменения выходной величины во времени при ступенчатом изменении возмущения ΔF на заданную величину при заданном начальном значении коэффициента разомкнутой системы kрс нач;
2) Определить статическую ошибку системы и длительность переходного процесса (помните!: так как автоматика работает с отклонениями, то есть любое исходное положение принимается за нулевое, установившееся отклонение ΔY от начального и есть статическая ошибка);
3) Подобрать значение kрс таким, чтобы САР находилась на границе устойчивости. Переходной процесс в этом случае представляет собой незатухающие (и не расходящиеся) колебания с постоянными амплитудой и частотой. Зафиксируйте граничное значение kрс гр;
4) Снять переходную характеристику при промежуточном значении коэффициента разомкнутой системы kрс нач ≤ kрс ≤ kрс гр. Сделать выводы, как величина коэффициента разомкнутой системы влияет на величину статической ошибки САР с пропорциональным регулятором и на качество переходных процессов (колебательность, перерегулирование, устойчивость).
Практические советы:
- все три осциллограммы можно снять одновременно. Для этого достаточно копированием в модельном окне создать три схемы, выходы которых через блок MUX подаются на один вход осциллографа. Для каждой из схем задаётся своё значение коэффициента разомкнутой системы;
- если осциллограмма получается в виде ломаной кривой, следует изменить шаг моделирования в закладке Simulation parameters.
В отчёте должны быть: исходная структурная схема, снятые осциллограммы (в одной координатной системе) и выводы о влиянии коэффициента разомкнутой системы на статические и динамические свойства САР с пропорциональным регулятором.
Задание №2. Исследовать влияние интегрирующего звена и величины коэффициента разомкнутой системы на статические и динамические свойства САР.
Снять переходную характеристику САР с интегральным регулятором, структурная схема которой приведена на рисунке 4.2. Варианты параметров схем принять из таблицы 4.1 в соответствии с вариантом к заданию №1.
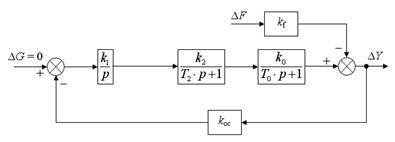
Рисунок 4.2 – Структурная схема САР с интегральным регулятором
Методические указания:
1) Снять осциллограмму изменения выходной величины во времени при ступенчатом изменении возмущения ΔF на заданную величину при заданном начальном значении коэффициента разомкнутой системы kрс нач;
2) Определить статическую ошибку системы и длительность переходного процесса. Оценить влияние интегрирующего звена в контуре регулирования на статические свойства САР;
3) Подобрать значение kрс таким, чтобы САР находилась на границе устойчивости (переходной процесс в этом случае представляет собой незатухающие колебания с постоянными амплитудой и частотой). Зафиксируйте граничное значение kрс гр. Сравните значения kрс гр для САР с пропорциональным регулятором и САР с интегральным регулятором и сделайте вывод, как введение интегрирующего звена в контур регулирования влияет на устойчивость системы;
4) Снять переходную характеристику при промежуточном значении коэффициента разомкнутой системы kрс нач ≤ kрс ≤ kрс гр. Сделать выводы, как величина коэффициента разомкнутой системы влияет на качество переходных процессов САР с интегральным регулятором (колебательность, перерегулирование, устойчивость).
В отчёте должны быть: исходная структурная схема, снятые осциллограммы (в одной координатной системе) и выводы о влиянии интегрирующего звена на статические и динамические свойства САР и о влиянии коэффициента разомкнутой системы на статические и динамические свойства САР с интегральным регулятором.
Отчёт по лабораторной работе должен содержать:
· цель работы;
· исходные структурные схемы;
· снятые осциллограммы (в одной координатной системе);
· выводы по работе.
Лабораторная работа №5.
Дата: 2019-02-02, просмотров: 377.