Расчет тяговых усилий сложен ввиду нелинейного характера зависимости потока от MDC.
В связи с этим вводятся различны допущения и упрощения.
Для цепи обмотки (катушки) электромагнита следует справедливое уравнение баланса энергий:
Uidt = i 2 rdt + wid Ф,
где U – электроэнергия от сети, i2r – потери в активном сопротивлении (на тепло), wi – энергия затрачиваемая на создание магнитного поля.
Переходя к конечным промежуткам, получим:
Для расчетов представляет интерес последний член, выражающий энергию магнитного поля.
Графически  можно представить площадью, заключенной между кривой намагничивания и осью ординат при неподвижном якоре.
можно представить площадью, заключенной между кривой намагничивания и осью ординат при неподвижном якоре.
ОС – кривая с притянутым якорем
Оа – кр. намагн.
Оа – якорь неподвижен
 - пл. oaba
- пл. oaba  - пл. bacdb
- пл. bacdb
 - пл. dcc’d
- пл. dcc’d  - пл.
- пл.
Т.о. энергия otcao из энергии поля переходит в механическую работу, затрачиваемую на движение якоря. Q мех = Q 1 + Q 2 + Q 3 - Q 4
Эта энергия проявяется в виде работы сил электромагнитного притяжения, следовательно
Fэм= - (dQмех/d δ)
При расчете Fэм считаем, что рабоат материала магнитопровода происходит на линейном участке кривой намагничивания и что вся энергия магнитного поля сосредоточена в рабочем воздушном заторе, тогда
Qвыхмех = iwФ/2 = (iw)2G/2
Откуда Fэм = -(iw)2/2 * (dG/d δ) = -1/2 * (Ф2/ μ0S) = -1/2 * (B2S/ μ0)
S – площадь
I – ток в катушке
Определение магнитной проводимости воздушного зазора.
При  - погрешность 20%
- погрешность 20%
Проинтегрируем:
ЛЕКЦИЯ №31
Кулачковые механизмы
31.1. Основные сведения
Кулачковая передача состоит из кулачка и толкателя. Чаще ведущим кинематическим звеном кулачковой передачи является кулачок. Кулачковые передачи преобразуют движение кулачка в поступательное движение или качание толкателя. Кулачковые передачи находят широкое применение в приборных устройствах и машинах, в различных автоматических, счетно-решающих, распределительных устройствах двигателей и станков-автоматов. Операционные кулачковые передачи используют для зажима деталей, возврата стрелок шкальных приборов на ноль, замыкания электрических контактов в электрических переключателях и при обработке деталей по копиру, фиксации взаимного положения деталей и узлов. Функциональная кулачковая передача служит для воспроизведения заданной функции. Большинство функциональных передач позволяет осуществить зависимость у = f (х). Перемещение кулачка, как и перемещение толкателя, может быть или линейным, или угловым.
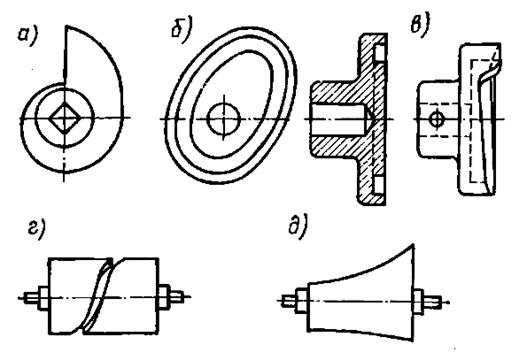
рис. 31.1
На рис. 31.1 показаны некоторые конструкции кулачков, которые применяются наиболее часто; а — плоский дисковый кулачок, б— торцовый кулачок с канавкой, в — торцовый кулачок без канавки, г — цилиндрический кулачок с канавкой, д — коноид. Кулачковый механизм с коноидом позволяет осуществить зависимость z = f (х, y ), где х пропорционально углу поворота коноида, у пропорционально перемещению коноида вдоль оси его вращения, z пропорционально перемещению толкателя. Радиус-вектор коноида изменяется не только при его вращении, но и при перемещении вдоль оси вращения.
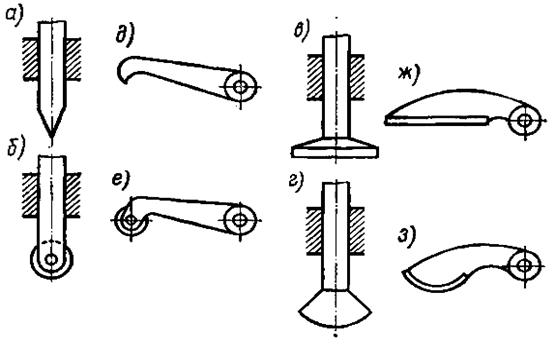
рис. 31.2
Заостренные толкатели (рис. 31.2, а, д) применяют только при небольших усилиях. Практически конец заостренного толкателя всегда имеет небольшое закругление. Часто используют толкатели, у которых имеется значительный радиус закругления конца (рис. 31.2, г, з), а также плоские толкатели (рис. 31.2, в, ж). Плоский толкатель работает с выпуклым кулачком. При роликовых толкателях между кулачком и толкателем действует трение качения (рис. 31.2, б, е). Благодаря этому уменьшаются трение и износ. Толкатели на рис. 31.2, а...г двигаются поступательно, а толкатели на рис. 31.2, д...з поворачиваются.
Кулачковые передачи могут иметь силовое или кинематическое замыкание. При силовом замыкании толкатель прижимается к кулачку пружиной. На рис. 31.4, а - ж представлены различные вариации кулачковых механизмов с силовым замыканием, где обозначены:
1 — кулачок, 2 — толкатель, 3 — пружина.
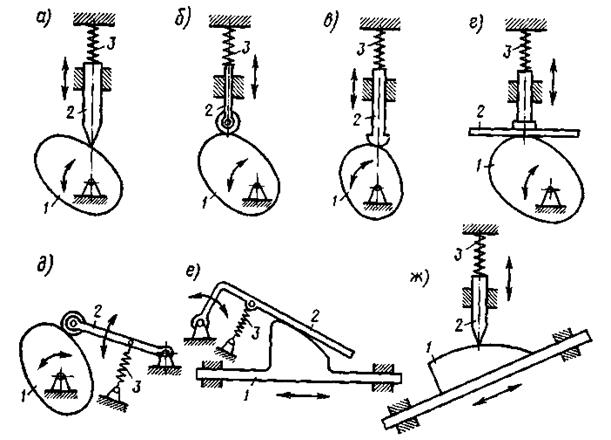
рис. 31.4
При кинематическом замыкании кулачкового механизма отпадает необходимость в пружине. Схемы кулачковых механизмов с кинематическим замыканием кинематической цепи показаны на рис. 31.5. При повороте торцового кулачка с канавкой (рис. 31.5, а) роликовый толкатель перемещается вверх или вниз вдоль своей направляющей, а ролик не выходит из канавки кулачка. Двойной дисковый кулачок (рис. 31.5, б) поворачивается относительно своей оси, вызывая угловое перемещение толкателя-коромысла. Ролики коромысла непрерывно касаются каждый своего кулачка. Поэтому профили обоих кулачков должны соответствовать один другому, что обеспечивается их построением. Хотя каждый из дисковых кулачков вместе со своим роликом составляет кулачковый механизм, требующий силового замыкания кинематической цепи, но их одновременное действие создает надежное кинематическое замыкание. При повороте цилиндрического кулачка с канавкой толкатель либо поворачивается (рис. 31.5, в), либо перемещается поступательно вдоль направляющей (рис. 31.5, г).
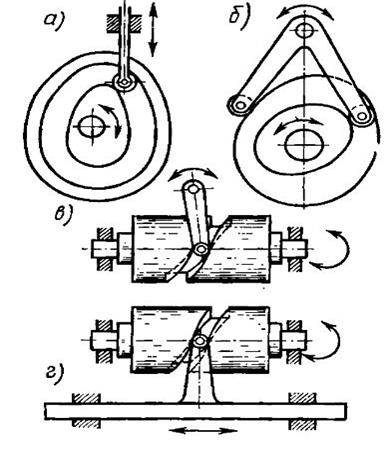
рис. 31.5
31.2 Кинематика кулачковых передач
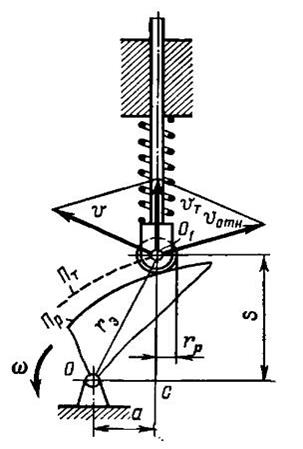
рис. 31.6
На рис. 31.6 показана кулачковая передача с поступательно перемещающимся дезаксиальным роликовым толкателем. Дезаксиальной эта передача называется потому, что средняя линия толкателя не проходит через геометрическую ось вращения кулачка О. Имеет место дезаксиал а = OC, причем OC перпендикулярно CO1. Кулачок вращается с угловой скоростью w. При этом геометрическая ось вращения ролика О1 перемещается по прямой вверх и все время находится на штриховой кривой, которая называется теоретическим профилем кулачка Пт. Длина пути s, проходимая толкателем, равна перемещению точки О1. Условно отсчитываем ее от точки С:  ,
,
где r э — радиус-вектор теоретического профиля Пт кулачка.
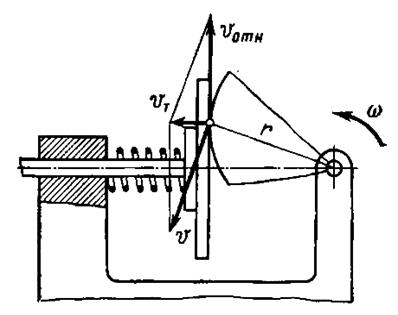
рис. 31.7
На рис. 31.7 построен план скоростей для центральной кулачковой передачи с дисковым кулачком и поступательно перемещающимся плоским толкателем. Окружная скорость кулачка перпендикулярна радиус-вектору r кулачка:
v = w r
Относительная скорость vотн, направлена по общей касательной, проведенной к поверхностям кулачка и толкателя в точке их касания. В данном случае она совпадает по направлению с плоскостью толкателя. Скорость толкателя vт направлена вдоль оси направляющей.
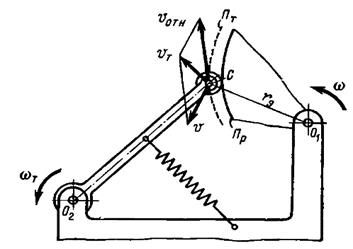
рис. 31.8
На рис. 31.8 показан план скоростей в кулачковом механизме с качающимся толкателем. Толкатель роликовый. Геометрическая ось вращения С ролика находится на теоретическом профиле Пт, кулачка. Реальный профиль Пр кулачка по отношению к теоретическому является эквидистантной кривой. Окружная скорость v перпендикулярна радиус-вектору rэ, а относительная скорость vотн касательна к теоретическому профилю в точке С. Окружная скорость vт толкателя перпендикулярна прямой O 2 C .
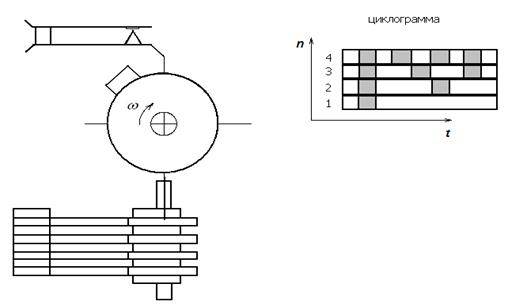
Программные механизмы
Кулачковые механизмы часто используют для смыкания и размыкания контактов. Программные механизмы обеспечивают размыкание групп контактов по определённой, заранее установленной, программе по времени. Набор кулачков из текстолита, установленных на общем валу, вращается с постоянной угловой скоростью w. Если кулачковый программный механизм совершает несколько оборотов, то программы повторяются. В этом случае программу указывают только для одного оборота и называют циклограммой. Заштрихованные участки соответствуют периодам замыкания, по горизонтали откладывается время (t), по вертикали количество кулачков (n).
Силы в кулачковых передачах
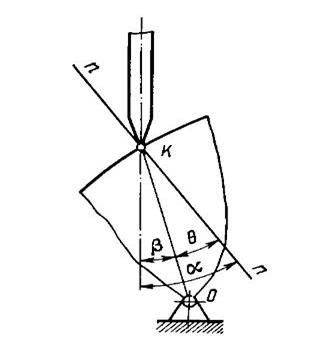
На рис. 31.9 показаны силы в дезаксиальной кулачковой передаче с поступательно перемещающимся толкателем. Угол b между осевой линией толкателя и радиус-вектором, проведенным через точку касания толкателя и кулачка, называют углом толкателя. В общем случае угол b — переменная величина. Угол между линией действия силы F , приложенной к толкателю, и нормалью пп к поверхности кулачка в точке касания с толкателем называют углом давления a. Угол q между направлением радиус-вектора и нормалью к поверхности кулачка или линией действия нормальной силы Fn для той же точки называется углом кулачковой передачи или углом подъема кулачка.
Из треугольника ABE (рис. 31.10) получим формулу для определения угла передачи:
tg q = dr / ( rd g ),
где g — Угол поворота радиус-вектора кулачка.
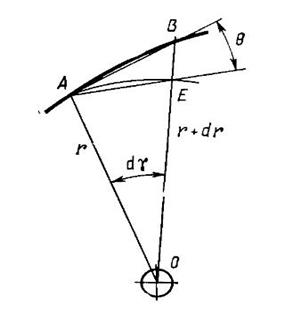
Треугольник ABE весьма близок к прямоугольному, причем угол ВЕА равен 90°. В этом легко убедиться, если учесть, что угол d g — бесконечно малая величина. Угол передачи может быть образован также касательной к поверхности кулачка и перпендикуляром к радиус-вектору, проведенному через точку касания. Из рис. 31.9 следует q = a ± b. Знак минус принимают, когда точка О находится правее линии действия силы F (рис. 31.11).
Для центрального кулачкового механизма
b = 0 и q = a
угол передачи в этом случае равен углу давления. Если не учитывать трения, то сила F, действующая на толкатель, вызовет нормальное давление
Fn = F / cos a
Сила трения, действующая на толкатель, равна
Fтр = f Fn
Равнодействующей сил Fn и Fтр является сила Fр. Угол между силами Fp и Fn равен углу трения j: f = tg j ,
где f — коэффициент трения между кулачком и толкателем. Увеличение угла давления при заданной силе F вызывает увеличение нормального давления Fn ,что способствует увеличению износа и потерь от трения. Сила Fр , действующая на толкатель, преодолевает силу пружины F и сопротивления от трения в направляющей. При значительных нагрузках реакции F 1 и F 2 возникают у краев направляющей. Они вызывают появление сил трения Fтрl = f1 F1 ; Fтр2 = f1 F2 ,
где f 1 — коэффициент трения между толкателем и направляющей.
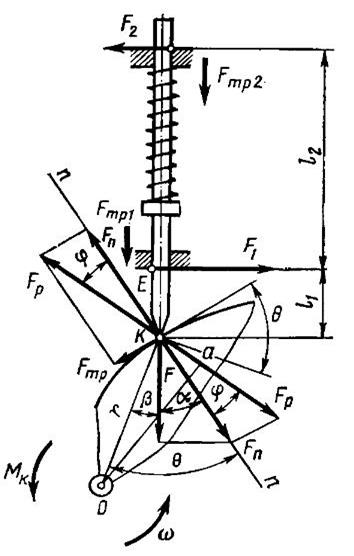
рис. 31.9
рис. 31.10 рис. 31.11
На рис. 31.3, а, б показано крепление роликов с подшипниками скольжения, на рис. 31.3, в, г — крепление роликов с подшипниками качения. Когда толкатель находится во взаимодействии с коноидом, то его конец имеет сферическую форму (рис. 31.3, д, е). Толкатель на рис. 8.3, д скользит по коноиду, а толкатель на рис. 31.3, е закреплен на подшипниках качения.
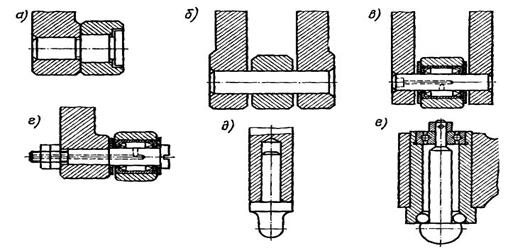
рис. 31.3
ЛЕКЦИЯ № 27
Дата: 2019-02-02, просмотров: 566.