Подвижную систему прибора можно представить в виде колебательной системы, состоящей из массы m, упругого элемента с жесткостью k и успокоителя с коэффициентом успокоения c.
 ; ( рис. 14.2)
; ( рис. 14.2)
где  - смещение массы относительно положения равновесия;
- смещение массы относительно положения равновесия;
 - инерционная сила;
- инерционная сила; 
 - сила успокоения; kx – сила упругости; F тр - сила сухого трения; F внеш - сила внешнего воздействия.
- сила успокоения; kx – сила упругости; F тр - сила сухого трения; F внеш - сила внешнего воздействия.
Силу F тр подбором опор подвижной системы минимизируют, поэтому ею можно пренебречь. Силу F внеш можно минимизировать с помощью амортизаторов или она может просто отсутствовать. Тогда уравнение приобретает вид:

При отсутствии успокоения (с = 0) решение уравнения имеет вид:
 ,
,
где  - частота собственных колебаний.
- частота собственных колебаний.
В приведенном виде полное уравнение имеет вид:
 или
или
 ,
,
где ε - половина удельного коэффициента успокоения.
Решение уравнения:
 ,
,
где С1 и С2 – постоянные интегрирования, определяемые из начальных условий.
Частные случаи:
· ε =ω0 - критическое успокоение;
· ε >ω0 - лимитационное движение;
· ε <ω0 - колебательное движение.
 . ( рис.14.1)
. ( рис.14.1)
α - угол поворота;
 - инерционный момент;
- инерционный момент;
 - момент, создаваемый успокоителем (с – коэффициент успокоения);
- момент, создаваемый успокоителем (с – коэффициент успокоения);
ķα - момент, действующий со стороны пружины;
M mp- момент трения;
M – момент, действующий на подвижную систему в состоянии покоя.
Частные случаи:
1. 
 - угол отклонения системы от начального положения равновесия при t = 0;
- угол отклонения системы от начального положения равновесия при t = 0;
 - круговая частота собственных колебаний.
- круговая частота собственных колебаний.
Если систему вывести из равновесия, то она будет совершать незатухающие колебания с  и
и  .
.
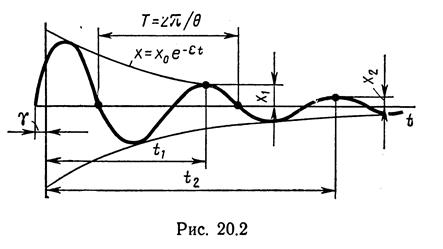
 - степень успокоения.
- степень успокоения.
 - начальная фаза;
- начальная фаза;
 - начальный размах колебаний.
- начальный размах колебаний.
На практике подвижную систему считают установившейся, если колебания относительно положения равновесия не превышают заданной величины  . Время входа в заданное отклонение – время успокоения.
. Время входа в заданное отклонение – время успокоения.
а) 
критический режим – апериодическое движение, колебаний нет.
б)  - медленное устремление
- медленное устремление  .
.
По мере приближения к 1 период  , при < 1 быстроту затухания колебаний определяют параметром
, при < 1 быстроту затухания колебаний определяют параметром
 - декремент колебаний.
- декремент колебаний.
Успокоители, в которых  , работают неустойчиво, при малых угловых скоростях, поэтому в точных приборах не используются.
, работают неустойчиво, при малых угловых скоростях, поэтому в точных приборах не используются.
Успокоители, работающие по принципу торможения, также не используются в точных приборах, так как в состоянии покоя или малых перемещений  создают статический сигнал
создают статический сигнал  .
.
\ 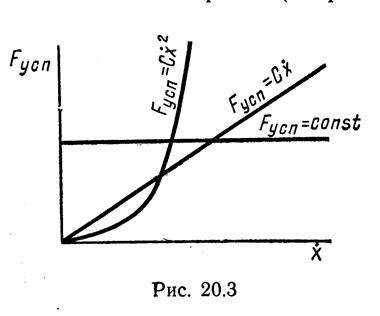
В приборостроении используют успокоители, момент успокоения которых прямо пропорционален скорости. В этом случае успокоитель не создает дополнительного момента в состоянии покоя.
В конструктивном исполнении успокоители: воздушные, жидкостные и магнитоиндукционные.
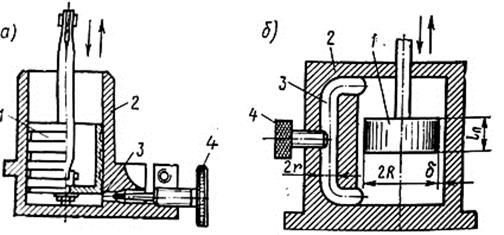
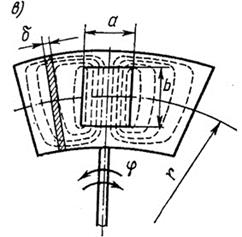
Рис.
ЛЕКЦИЯ № 33
Амортизаторы.
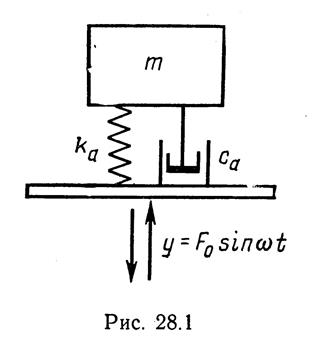
Колебательное движение основания (объекта), на котором укреплен прибор, можно описать функцией, изменяющейся во времени.
Например, 
Дифференциальное уравнение движения прибора на амортизаторах:
 ,
,
где m - масса прибора; xa - смещение прибора относительно основания;
ca - коэффициент успокоения, создаваемого в амортизаторе; y - смещение основания; ka - коэффициент жесткости амортизатора.
Решение уравнения при синусоидальном законе движения основания:
 ,
,
где x 0 - начальный размах колебаний прибора на амортизаторе;
ε - половина удельного коэффициента успокоения в системе «прибор-амортизатор»;
ω a - частота собственных колебаний прибора;
γ a и γ1 - начальные фазы; β - коэффициент динамичности;
x ст - статическая деформация амортизатора под действием веса прибора.
Первое слагаемое описывает свободные затухающие колебания, второе слагаемое -движение самого прибора.
При отсутствии успокоения в системе амортизации (са = 0)
 ,
,
где  - отношение угловых частот вынужденных и собственных колебаний. На рис. показана зависимость коэффициента динамичности β от qa.. Коэффициент динамичности показывает, во сколько раз изменяется амплитуда вынужденных колебаний прибора, установленного на амортизаторе по сравнению с амплитудой колебаний основания:
- отношение угловых частот вынужденных и собственных колебаний. На рис. показана зависимость коэффициента динамичности β от qa.. Коэффициент динамичности показывает, во сколько раз изменяется амплитуда вынужденных колебаний прибора, установленного на амортизаторе по сравнению с амплитудой колебаний основания:
 .
.
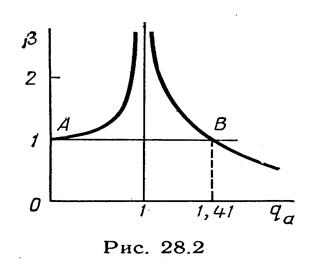
В точке 1 передаваемая сила равна возмущающей, а это значит, что прибор жестко прикреплен к основанию. Анализ графика показывает, что коэффициент жесткости должен быть такой, чтобы угловая частота ω a собственных колебаний прибора на амортизаторе была мала по сравнению с угловой частотой ω возмущающей силы. График также показывает, что если отношение частот qa < 1,41 (точка В), то амортизатор увеличивает передаваемую силу.
ЛЕКЦИЯ№30
Потенциометры
Потенциометры предназначены для получения электрического сигнала функционально зависящего от перемещения токосъёмного элемента. Потенциометр представляет собой регулируемый делитель напряжения, выполненный на основе резистивного элемента.

Рис.30.1.
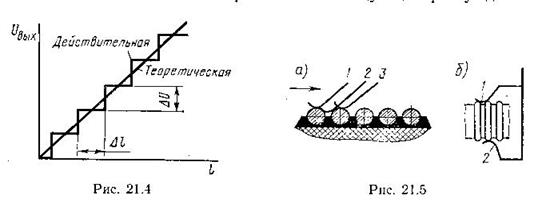
Конструкция линейного потенциометра представляет собой жесткий каркас 1 постоянного поперечного сечения, выполненный из токонепроводящего материала. На каркас намотана проволока 5 (резистивный элемент), от которого в точках А и В сделаны два отвода 6. По зачищенной от изоляции контактной дорожке перемещается подвижный контакт 4, связанный с движком 2. От подвижного контакта 4 сделан отвод 3. Полная рабочая длина потенциометра меньше длины намотки. Это сделано для того, чтобы не происходило размыкание контакта 4 при выходе движка за расчетные пределы.
В соответствии с обозначениями электрической схемы входное напряжение подводится к точкам А и В, а выходное напряжение снимается с участка между точками А и С. Связь между омическим сопротивлением обмотки Rx c перемещением движка lx:
 ,
,
где R 0  - полное сопротивление потенциометра.
- полное сопротивление потенциометра.
Выходное напряжение на линейном потенциометре:
Зависимость U вых = f ( lx ) – характеристика потенциометра;
если зависимость Rx = f ( lx ) линейна, то потенциометр линейный;
если зависимость Rx = f ( lx ) нелинейна – функциональный потенциометр.
 Параметры потенциометров:
Параметры потенциометров:
|
2) мощность;
3) предельное рабочее напряжение;
|
перемещение движка;
5) момент трогания.
Характеристики потенциометра
1. Разрешающая способность - определяется витковой погрешностью.
В проволочных потенциометрах равномерное перемещение движка приводит к дискретному изменению U вых . Это связано с переходом движка с одного витка на другой.
Величина Δ U обратно пропорциональна числу витков:
Δ U обусловливает витковую погрешность.
Витковая погрешность δв – наибольший отклонение U вых (зависит от теоретической характеристики). Величина этого отклонения равна Δ U /2.
В процентах U 0 % витковая погрешность δв равна: δв = (1/2 w )·100%.

2. Общее сопротивление R 0 – зависит от геометрических размеров потенциометра и параметров обмотки (R 0 ограничивается снизу допустимым нагревом и точностью, а сверху – технологическими возможностями).
На характеристику потенциометра оказывает влияние сопротивление нагрузки R н .
При Rн = ∞, 
При Rн ≠ ∞,  , где
, где  , К = R н / Ro .
, К = R н / Ro .
Погрешность δн от нагрузки равна
Погрешность δн тем больше, чем меньше K, следовательно К необходимо увеличивать, например, за счёт уменьшения R о .
3. Действительная мощность потенциометра P.
 , где
, где 
Номинальная мощность рассеяния P ном – величина мощности, которая может рассеиваться без ухудшения его характеристик.
Величина мощности позволяет определить максимальное допустимое значение U 0 max:
Действительная мощность рассеяния:
при R н = ∞, P ном = U 0 2 / R 0;
при R н ≠ ∞,  ; К = R н / Ro;
; К = R н / Ro;
при R н = R 0 (К = 1); P = 0,25۰P ном
4. Допустимая скорость перемещения движка не больше чем
100÷150 об/мин.
5. Рабочий вращающий момент; в проволочном потенциометре общего назначения 5 ÷ 36 Нмм.
Конструкция
Каркасы: кольцевые (а), пластинчатые (б), стержневые (в), дуговые (г), многооборотные (д)
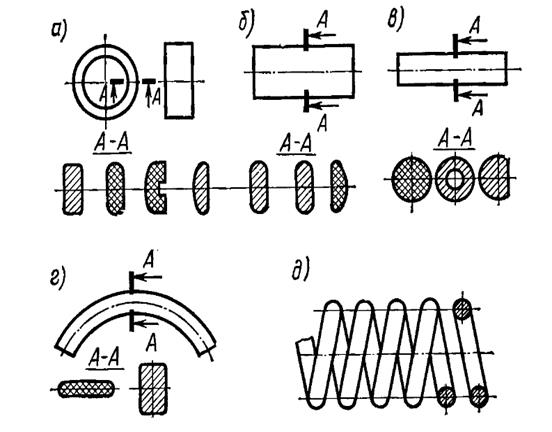
Рис.
Материалы: гетинакс марок B, Bв, Бв; текстолит марок ПТК, B4; пресспорошки марок К+18-2, К+21-22, АГ-4; алюминиевые сплавы АMг, Д16.
Изоляционная плёнка у металлических каркасов получается либо нанесением лака, либо анодированием с последующей пропиткой лаком.
При конструировании особое внимание следует обращать на выполнение выводных концов.
Для подсоединения выводного провода применяются пайка и сварка. Припой ПОС-40, ПОС-61; для нихрома – ПСр 25, ПСр 45. Из технологических соображений при диаметре проволоки d = 0.03…0.3 мм толщину каркаса следует брать > 4d; радиусы закругления > 2d .
Требования к проволоке:
1) высокое удельное сопротивление,
2) малый температурный коэффициент электрического сопротивления,
3) высокая коррозионная стойкость,
4) высокая прочность и износостойкость.
Материалы проволоки: константан, манганин, нихром, платина-иридий, платина – никель, палладий – серебро, золото – никель.
Расчёт потенциометров
Расчёт линейного потенциометра заключается в определении диаметра намоточного провода и геометрических размеров каркаса.
Обычно заданы: R 0 , U 0 , R н , δв допустимые габариты, условия эксплуатации.
1. Определяется P ном = U 0 2 / R 0; зная схему включения, определяется действительная мощность рассеяния P .
2. Вычисляется диаметр проволоки по формуле: 
значения диаметра округляется в сторону увеличения до стандартного.
3. Определяется длина провода
 , где ρ – удельное сопротивление в Ом۰м
, где ρ – удельное сопротивление в Ом۰м
4. Вычисляется средняя длина витка lср = L/w;
при прямоугольном каркасе 
5. По средней длине витка выбирают число витков  ,
,
где l0 - рабочая длина обмотки; t - шаг намотки.
Выбор диаметра проволоки d определяется тепловым режимом по допустимой плотности тока j:
· для каркасов из пресспорошка j = 10 А/мм2;
· для металлических каркасов j = 30 А/мм2;
· для благородных металлов j = 50 А/мм2;
· с охлаждением j = 80 ÷ 100 А/мм2.
Значения диаметров проволоки выбираются из интервала: d = 0,03÷0,3 мм.
Для устранения влияния нагрузки линейный потенциометр проектируют как функциональный. Например, можно применять схемы с дополнительным сопротивлением или шунтом.
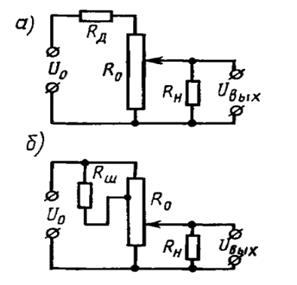
Подключение шунта наиболее эффективно в точке α = 0,74. Шунт должен иметь сопротивление Rш = 0,31Rн.
Дата: 2019-02-02, просмотров: 416.